CoRL 2018
ROBOTURK: A Crowdsourcing Platform for Robotic Skill Learning through Imitation
Initial RoboTurk system with a focus on simulation
[August 2021] robomimic – We released robomimic, a framework for robot learning from demonstration. It offers a broad set of demonstration datasets collected on robot manipulation domains with RoboTurk, and learning algorithms to learn from these datasets.
[May 2021] Multi-Arm RoboTurk – MART was nominated as a best multi-robot systems paper finalist at ICRA 2021!
[December 2020] Human-in-the-Loop Imitation Learning – We recently extended RoboTurk to enable human-in-the-loop teleoperation and developed Intervention Weighted Regression, a simple and effective algorithm to learn from such interventions.
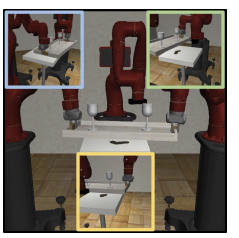
We provide 6 degree of freedom intuitive motion control which maps phone movement to robot arm movement.
RoboTurk can host multiple simultaenous users that each control a robot arm in its own workspace, as well as multiple users that control robot arms in a shared workspace, allowing for demonstrations on collaborative and adversarial tasks.
Real-time robot control of simulated and physical robot arms from across the world. This has been stress-tested by controlling robot arms at Stanford from far locations such as China and India.
Users can watch an autonomous robot arm try to solve tasks and provide assistance when necessary, helping the robot learn from its mistakes.
robot demonstrations
data collection
successful Picking demos
successful Assembly demos
total demonstrations

robot demonstrations
data collection
dexterous manipulation tasks
non-expert users
demonstrations
simulation tasks
real-world tasks
humans of varying proficiency
human trajectories
Initial RoboTurk system with a focus on simulation
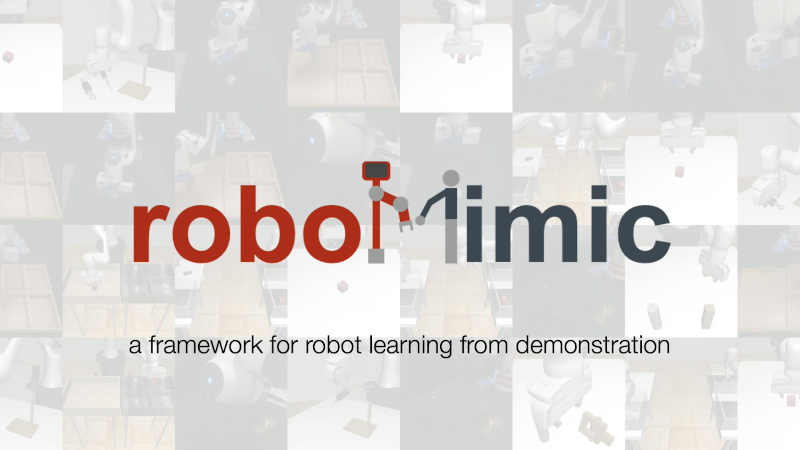
RoboTurk on Real World Tasks
RoboTurk on Simulated Multi-Arm Environments
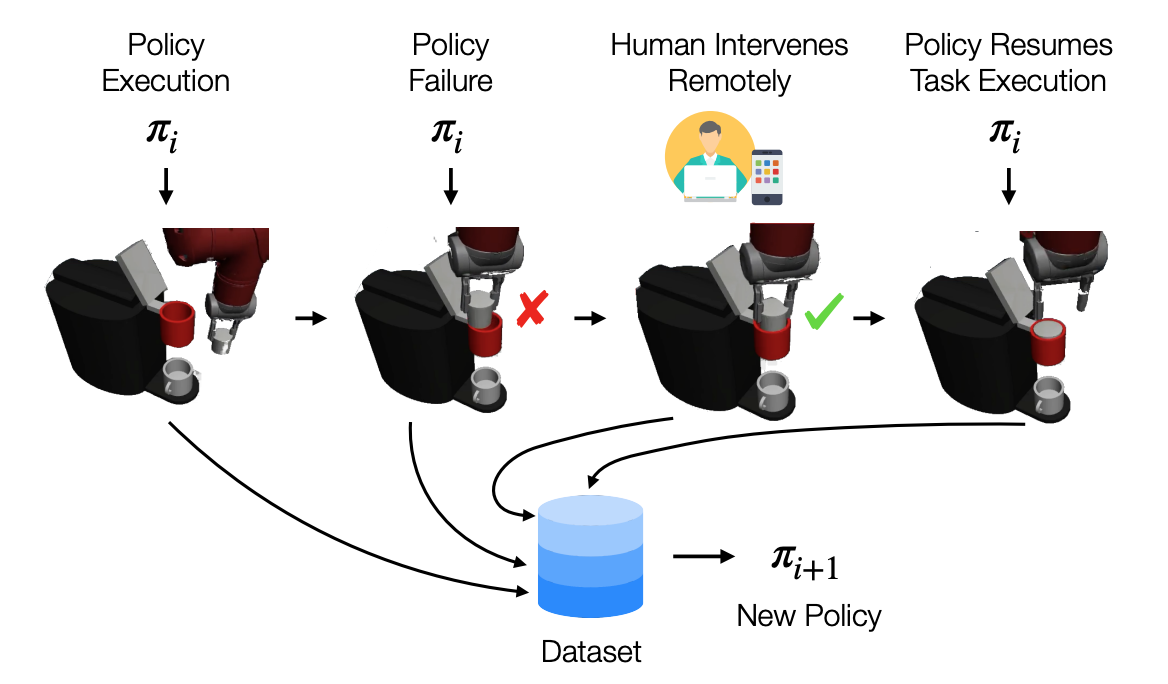
RoboTurk with Human-in-the-Loop Interventions
IRIS: Implicit Reinforcement without Interaction at Scale for Learning Control from Offline Robot Manipulation Data
Ajay Mandlekar, Fabio Ramos, Byron Boots, Silvio Savarese, Li Fei-Fei, Animesh Garg, Dieter Fox
ICRA 2020
Learning to Generalize Across Long-Horizon Tasks from Human Demonstrations
Ajay Mandlekar*, Danfei Xu*, Roberto Martín-Martín, Silvio Savarese, Li Fei-Fei
RSS 2020
Generalization Through Hand-Eye Coordination: An Action Space for Learning Spatially-Invariant Visuomotor Control
Chen Wang*, Rui Wang*, Ajay Mandlekar, Li Fei-Fei, Silvio Savarese, Danfei Xu
IROS 2021
Co-GAIL: Learning Diverse Strategies for Human-Robot Collaboration
Chen Wang, Claudia Pérez-D'Arpino, Danfei Xu, Li Fei-Fei, C. Karen Liu, Silvio Savarese
Arxiv 2021