Yassen Gorbounov
Yassen Gorbounov
580 California St., Suite 400
San Francisco, CA, 94104
2016
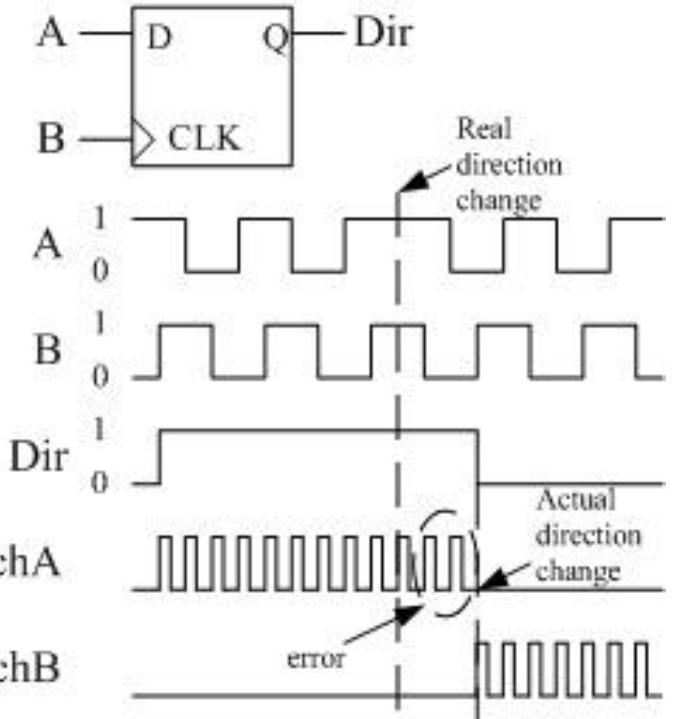
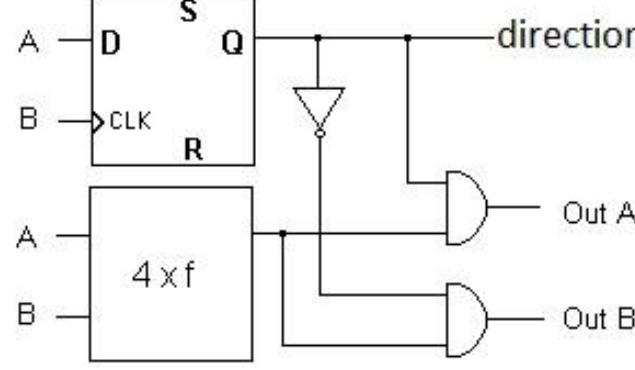
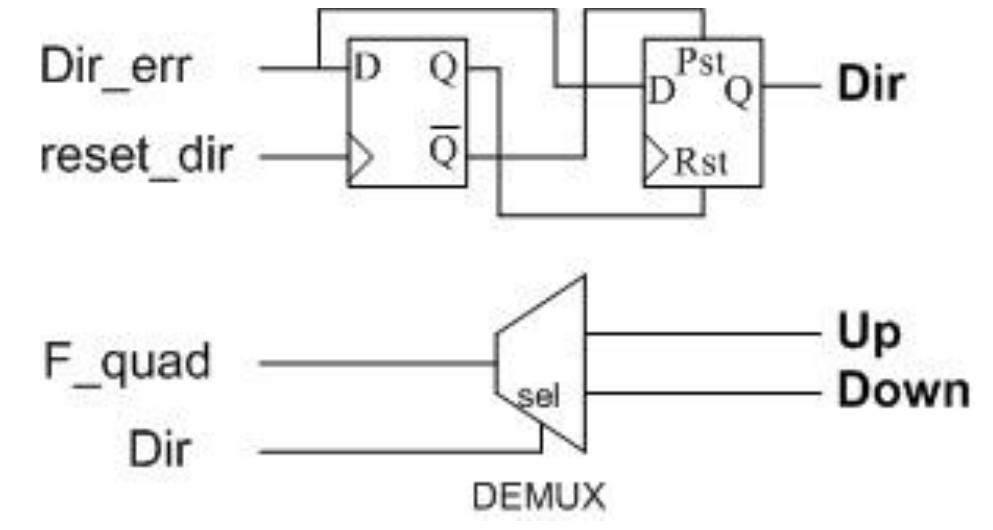
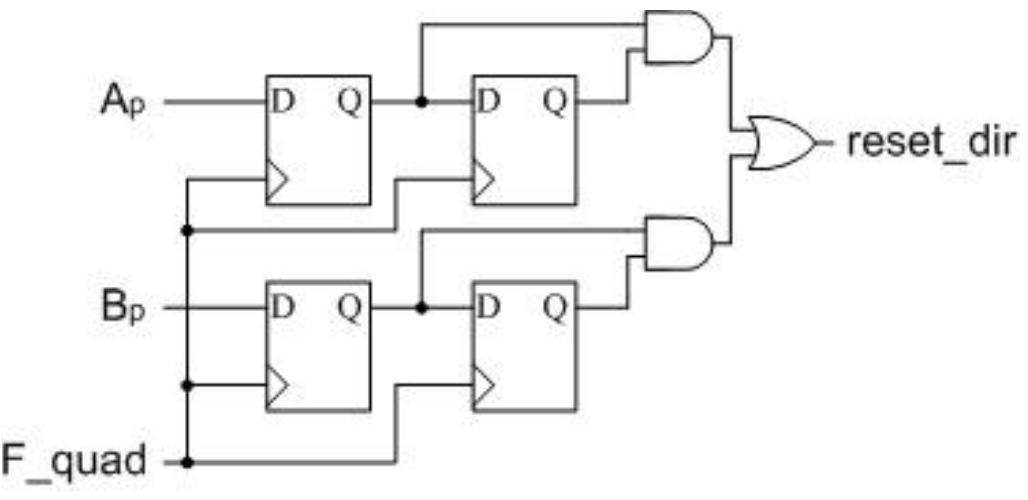
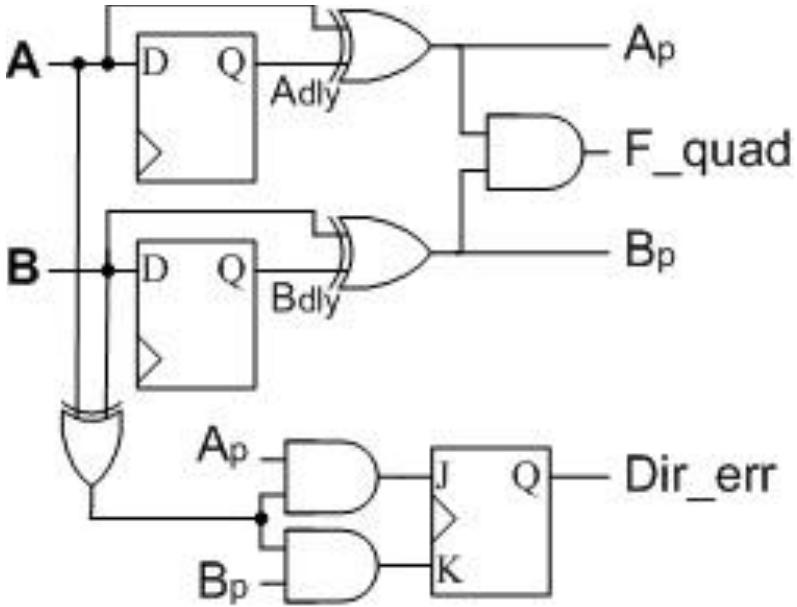
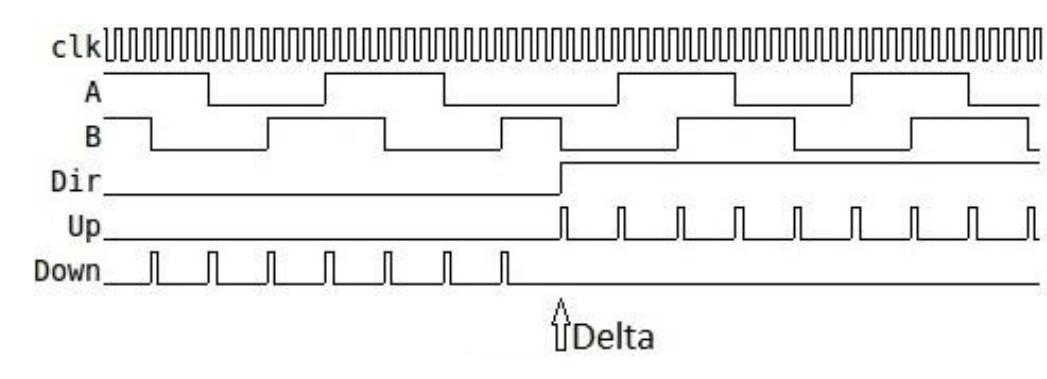
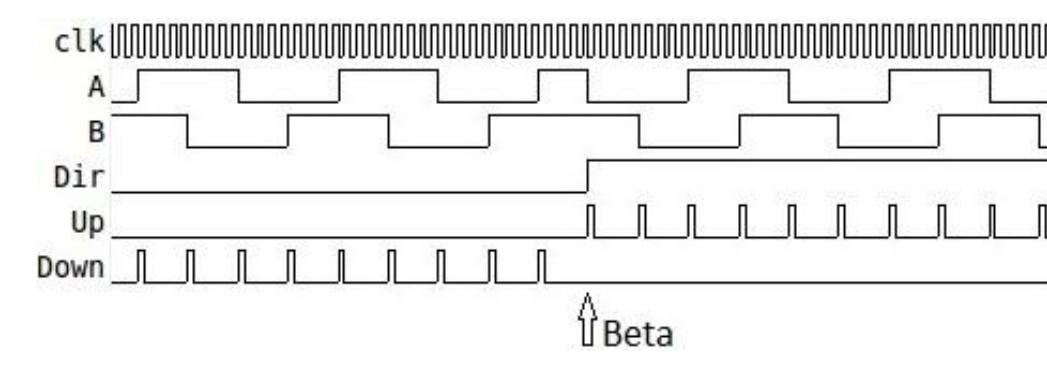
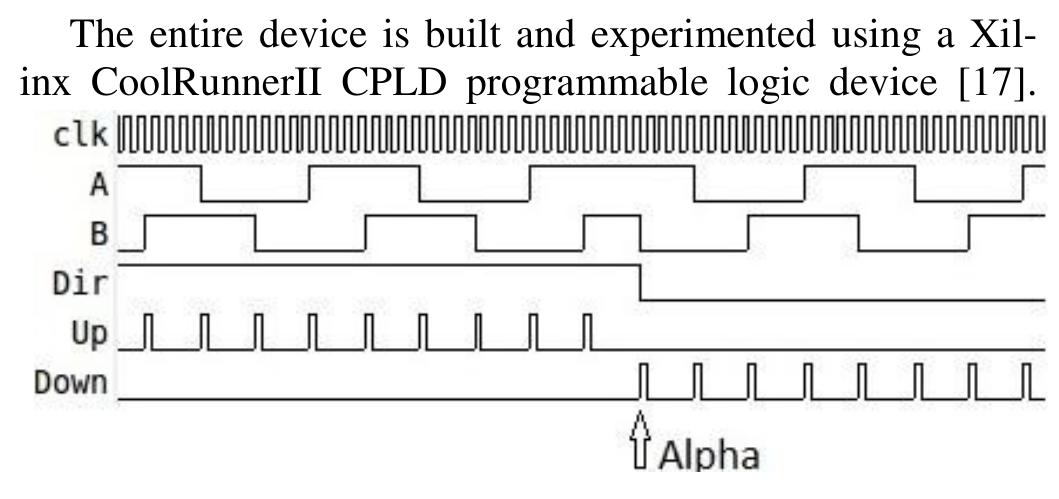
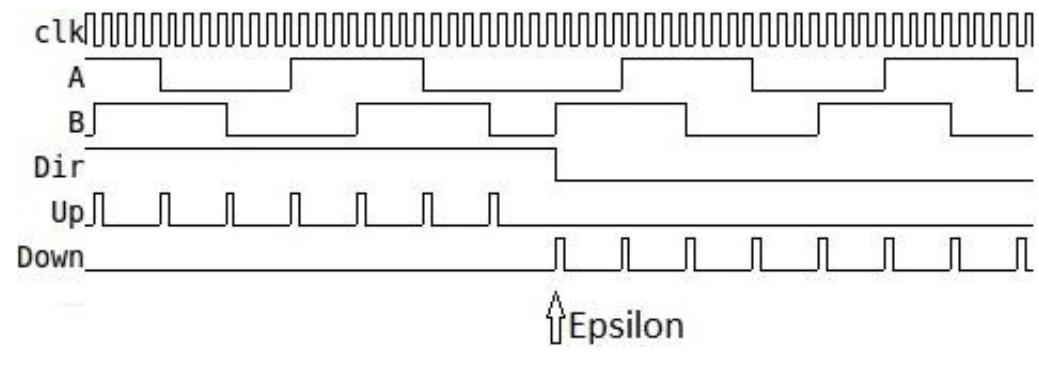
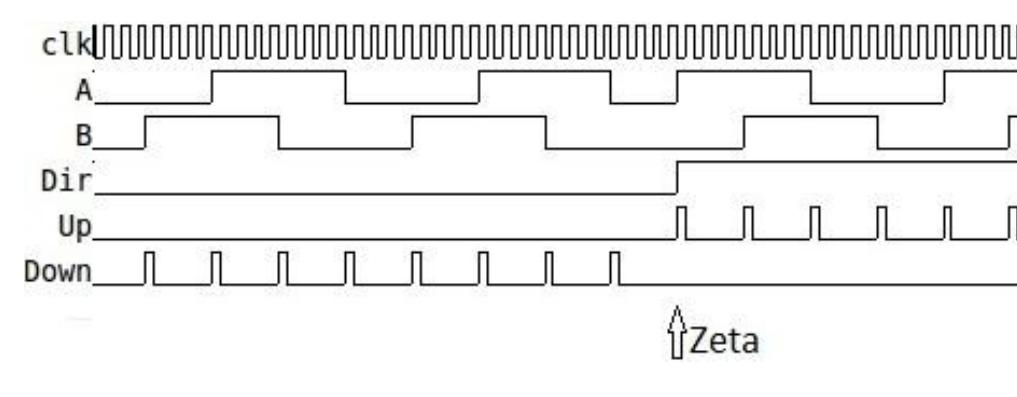
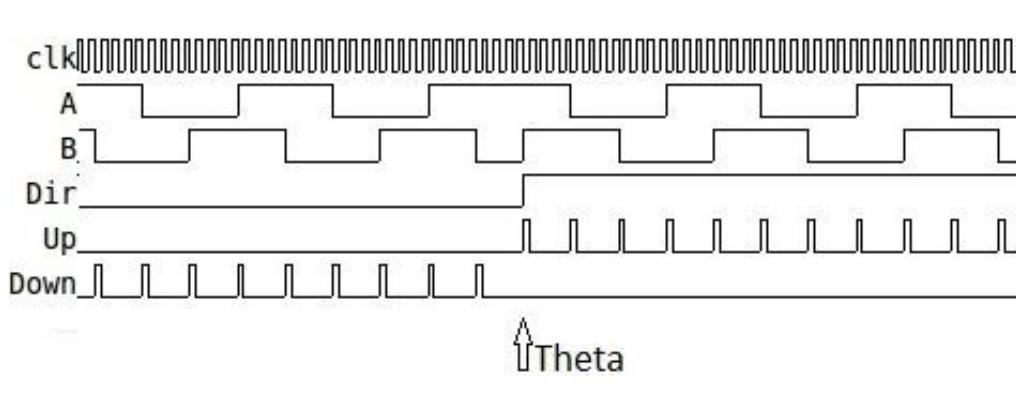
the quadrature encoder (or incremental detector) is amongst the most widely used positional feedback devices for both rotational and linear motion machines. It is well known that in conventional circuits for quadrature signals decoding, an error emerges during the direction change of the sensor movement. In some situations this error can be accumulative but in any case it provokes a position error, that is equal to the resolution (one pulse) of the sensor. A corrective algorithm is proposed here that fully eliminates this type of error. It is an improvement over a previous research of the author which is much simpler and resource saving without compromising the performance of the device. A Xilinx CPLD platform has been chosen for the experiments. The inherent parallelism of programmable logic devices permits a multi-channel CNC machine to be fully served by a single chip. This approach outperforms the capabilities of any conventional microcontroller available on the market.
AI