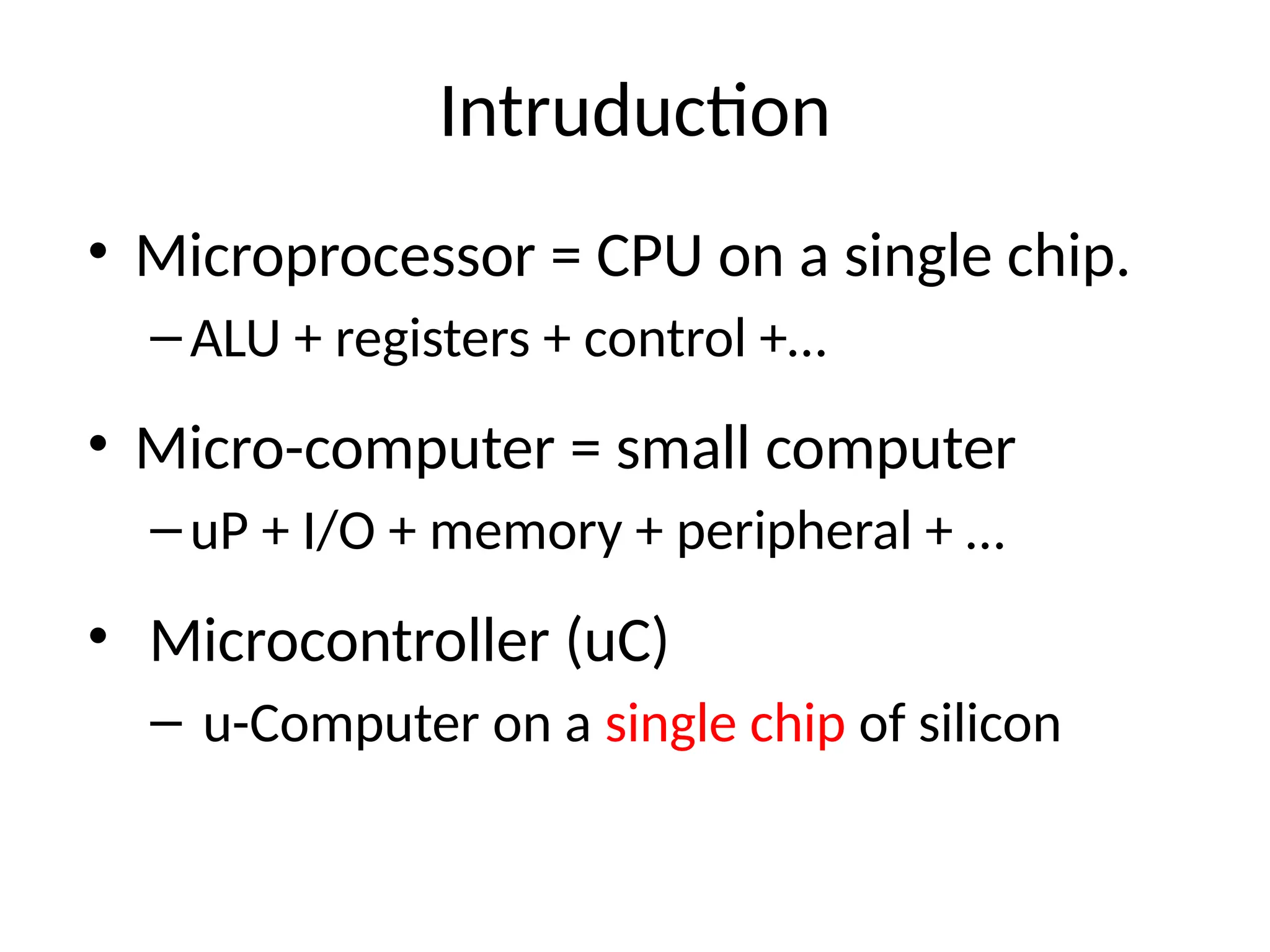
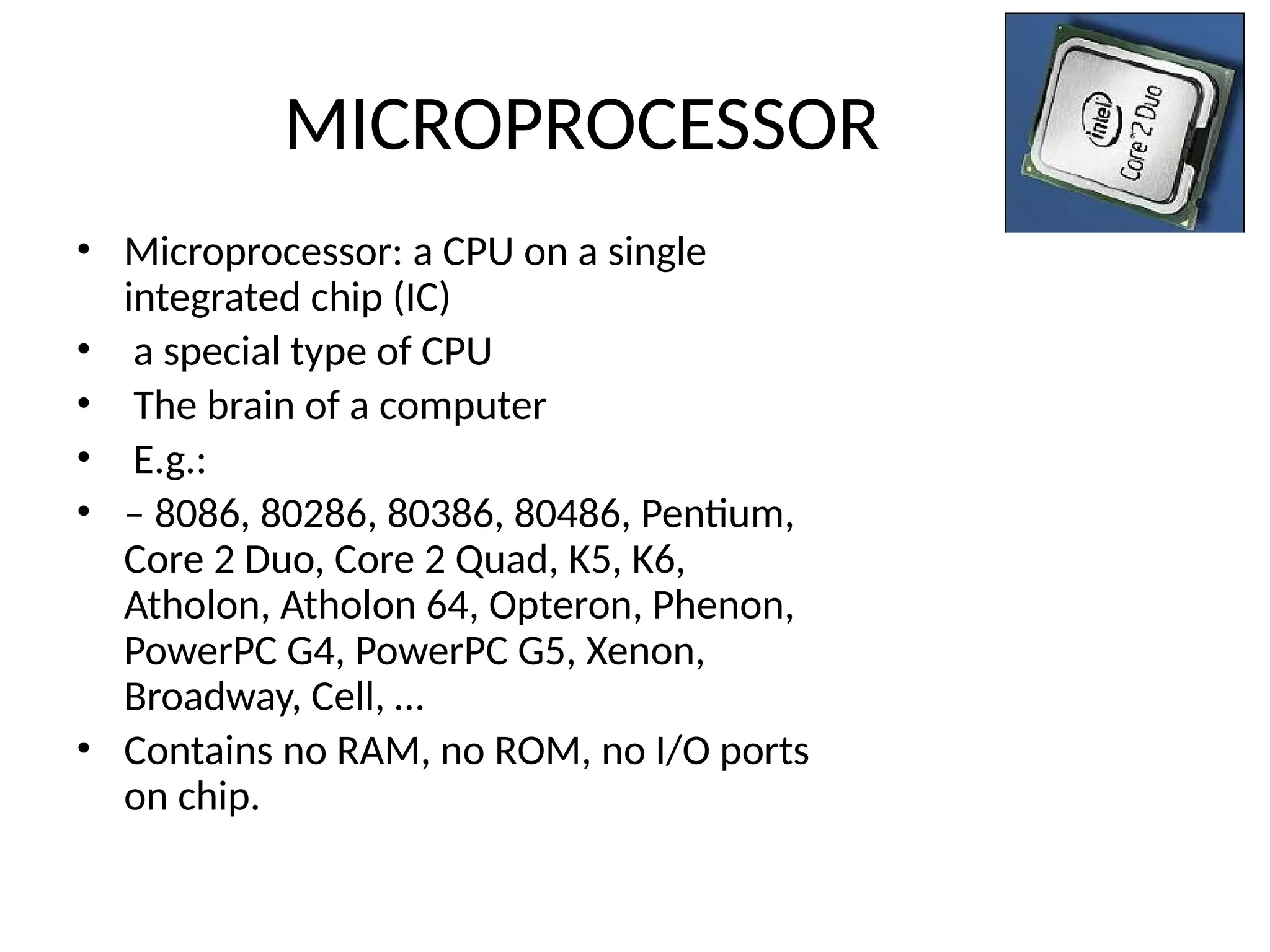
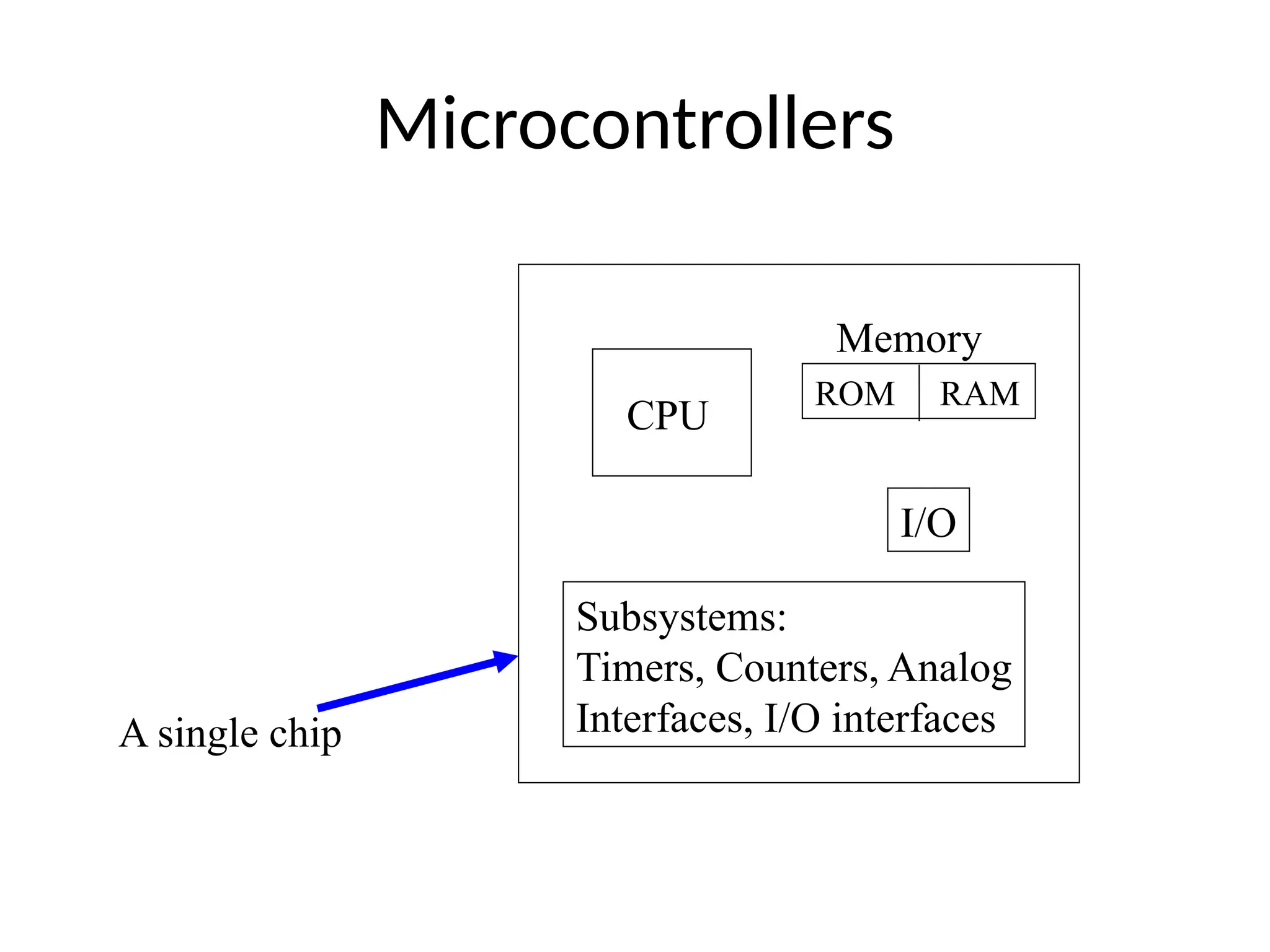
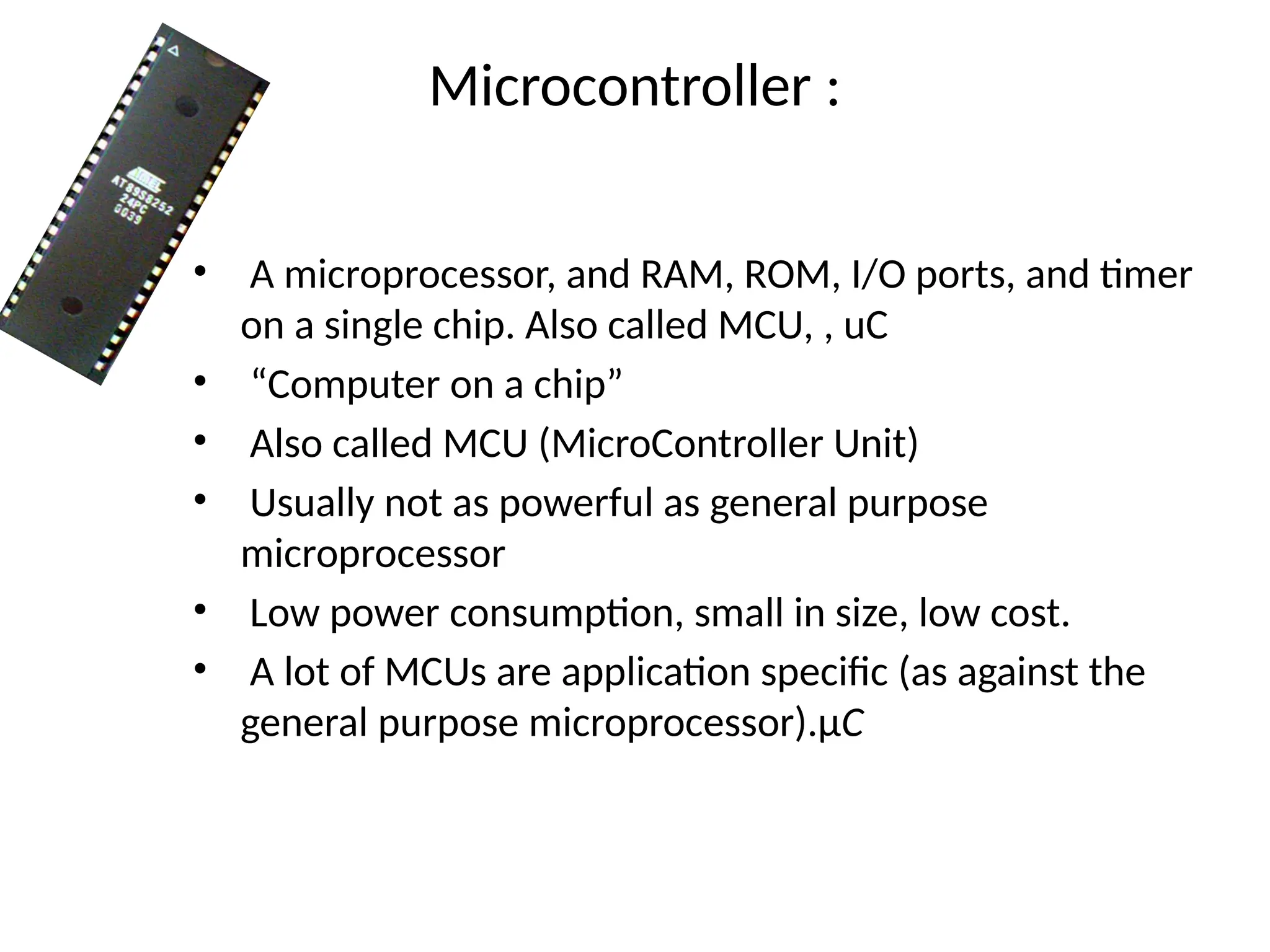
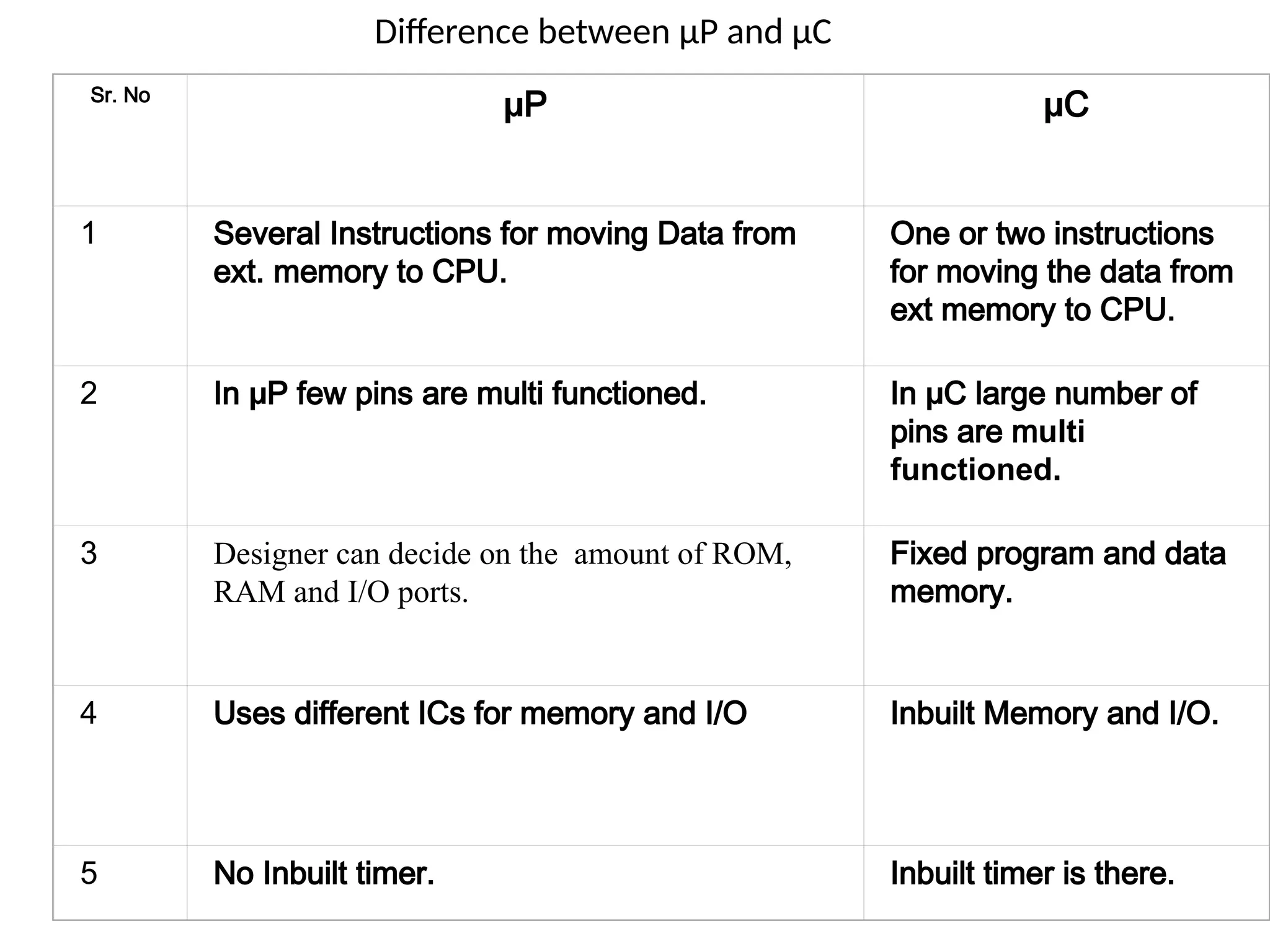
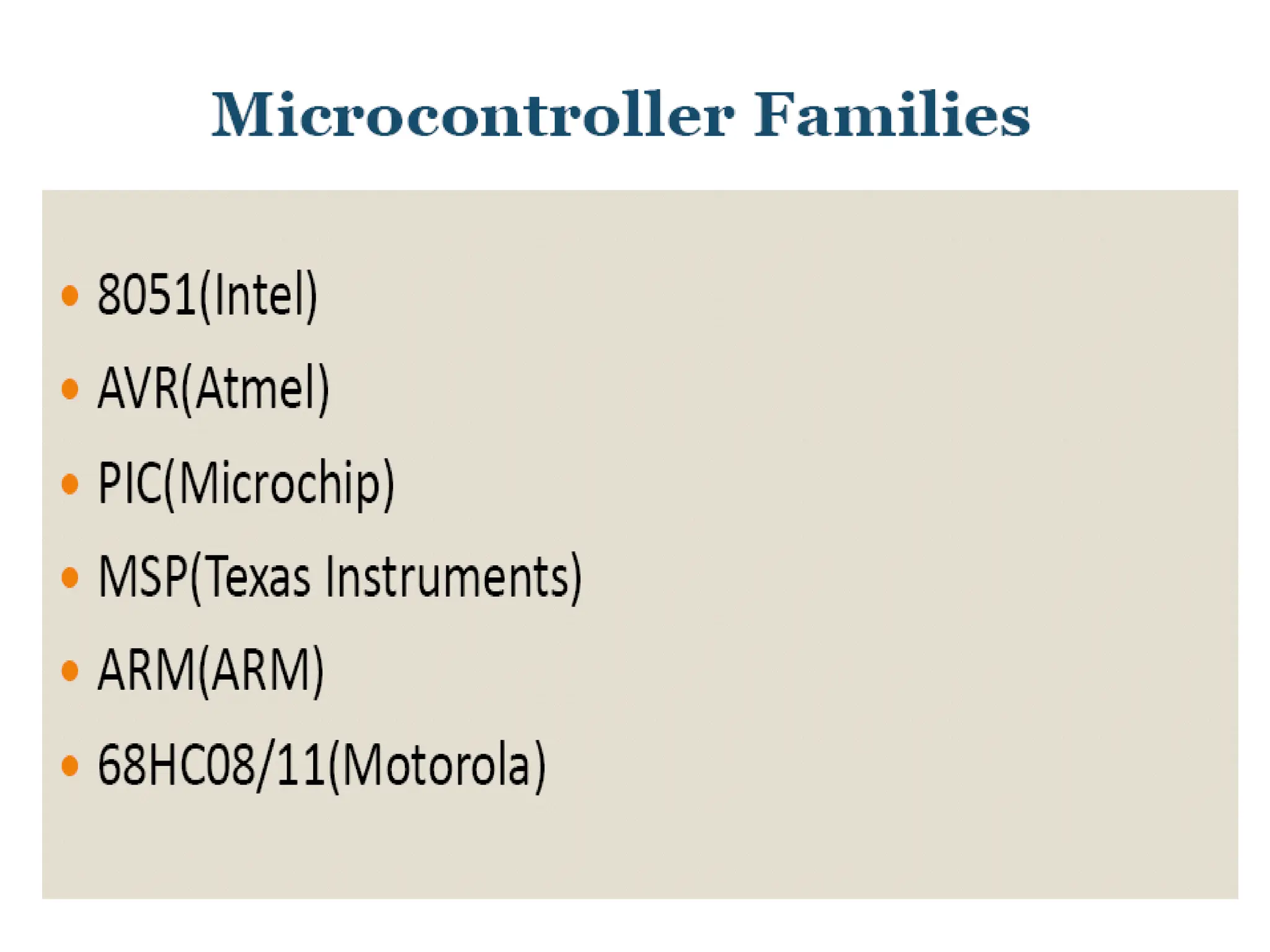
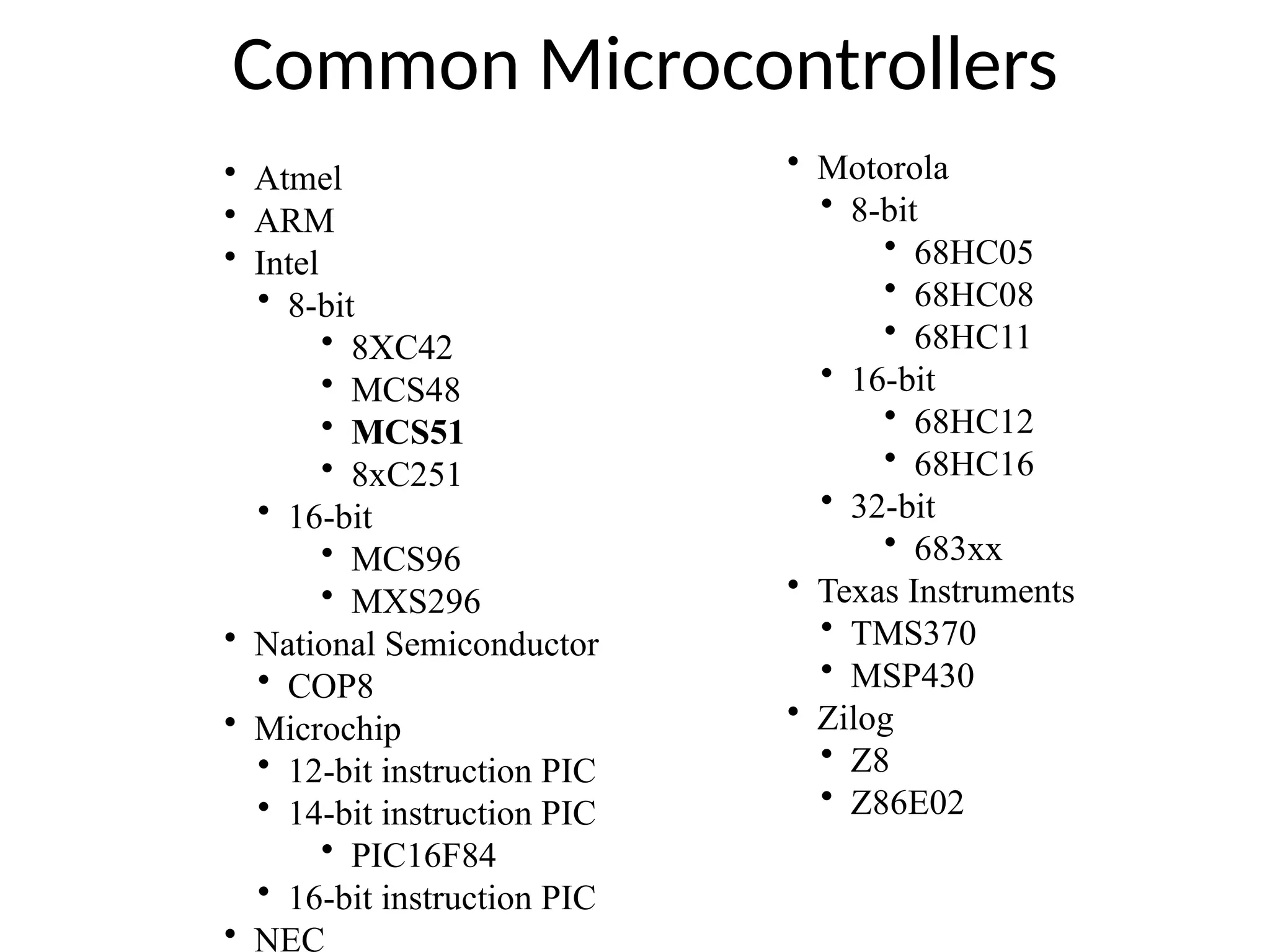
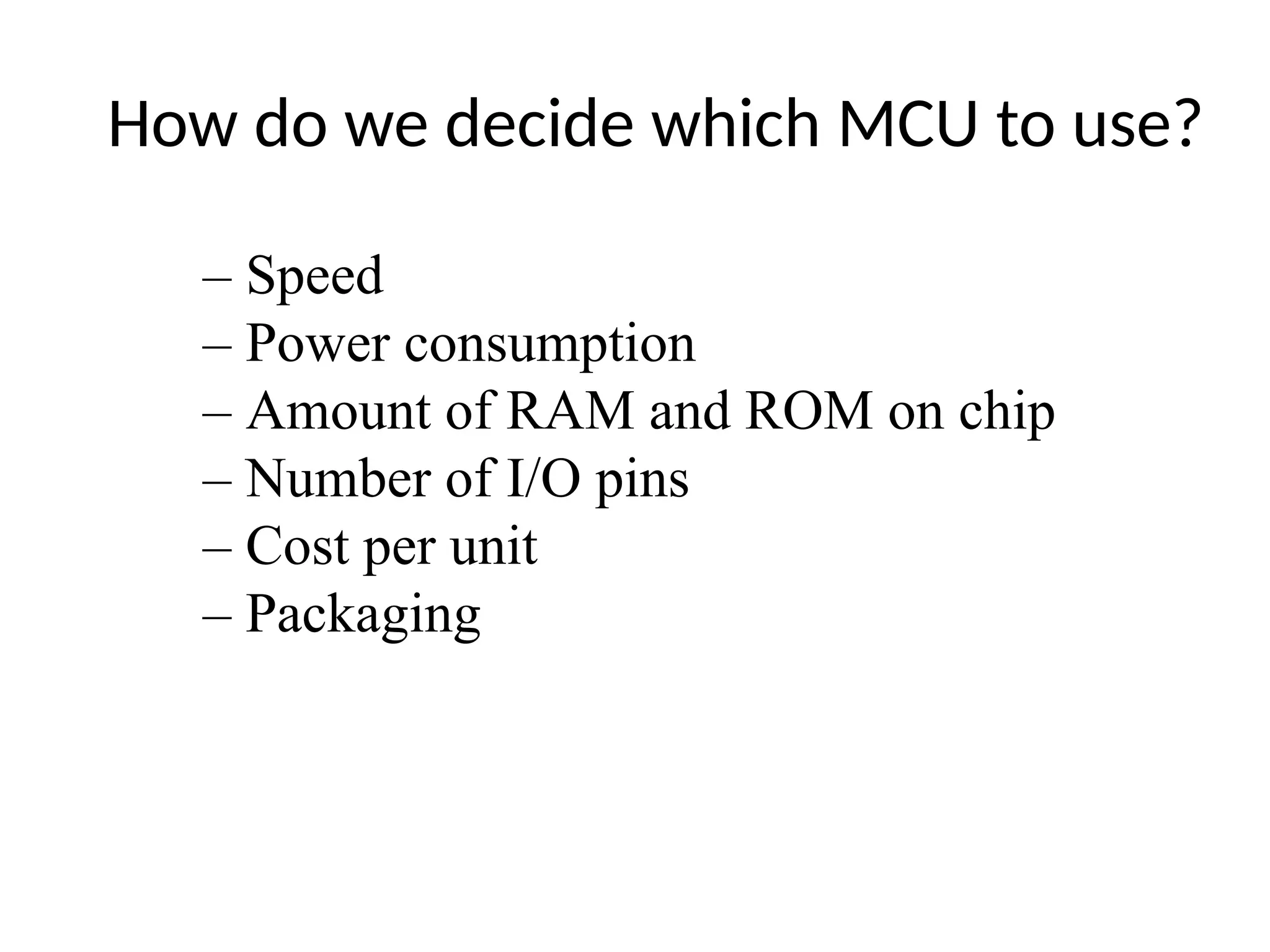
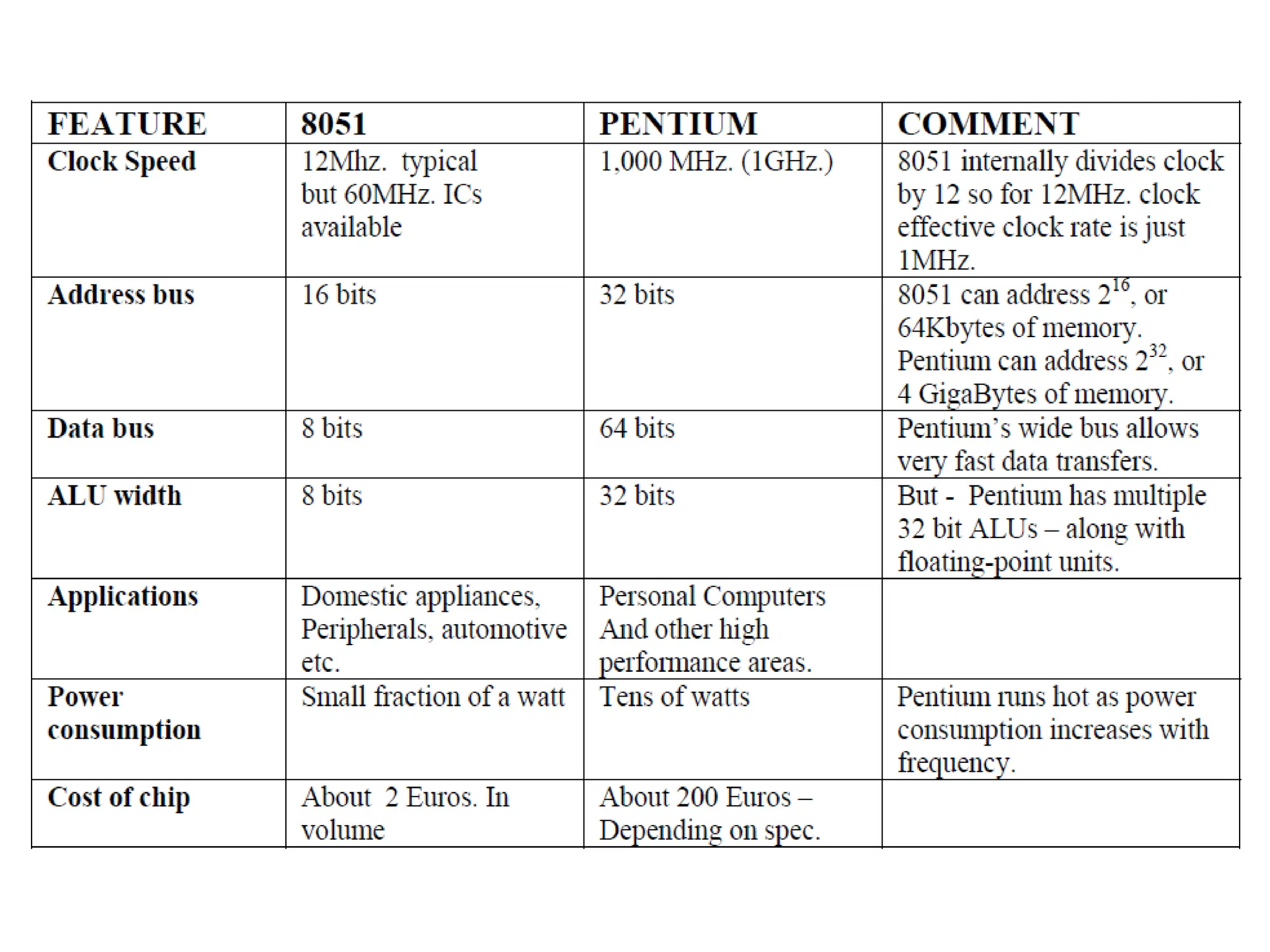
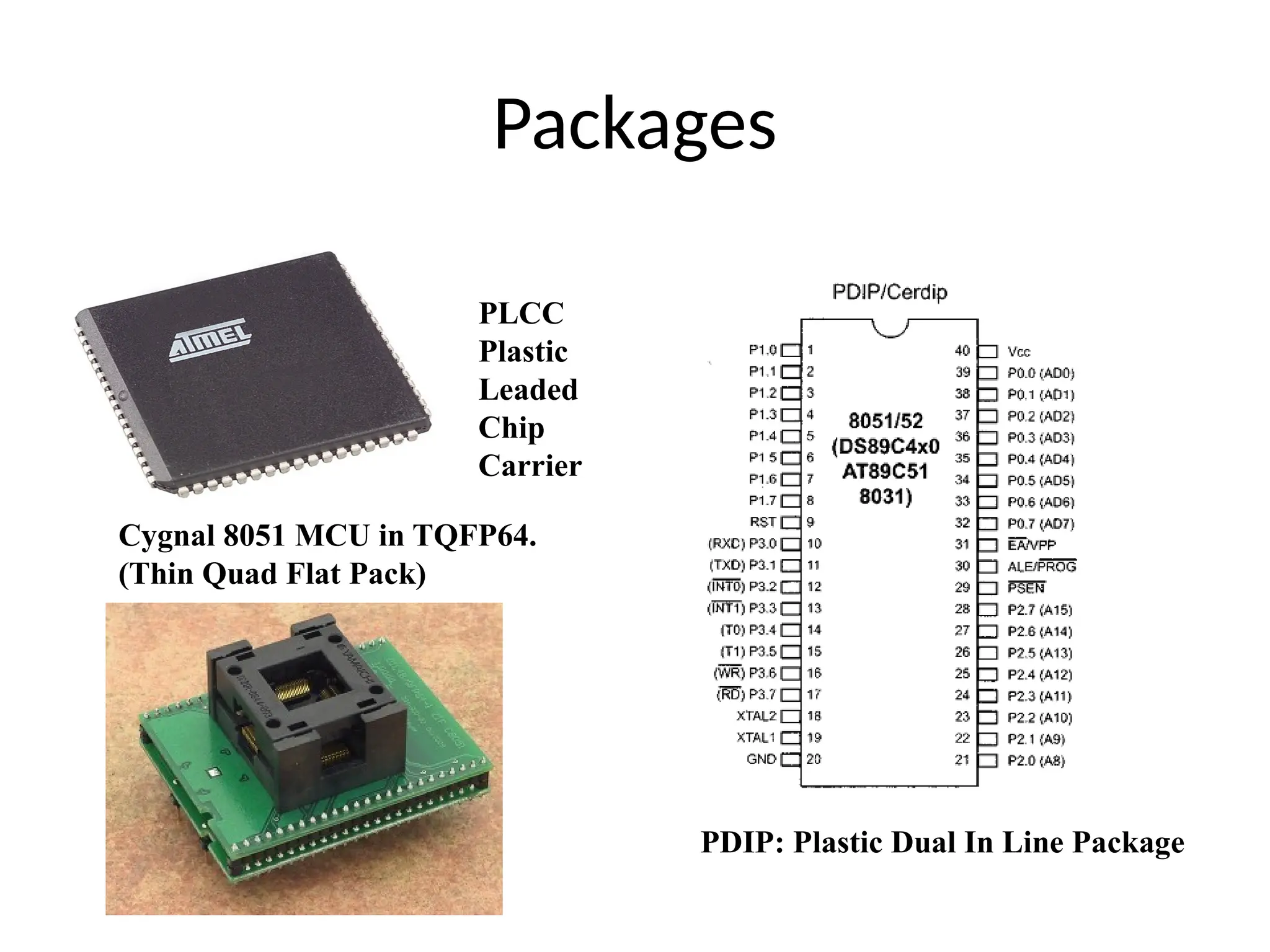
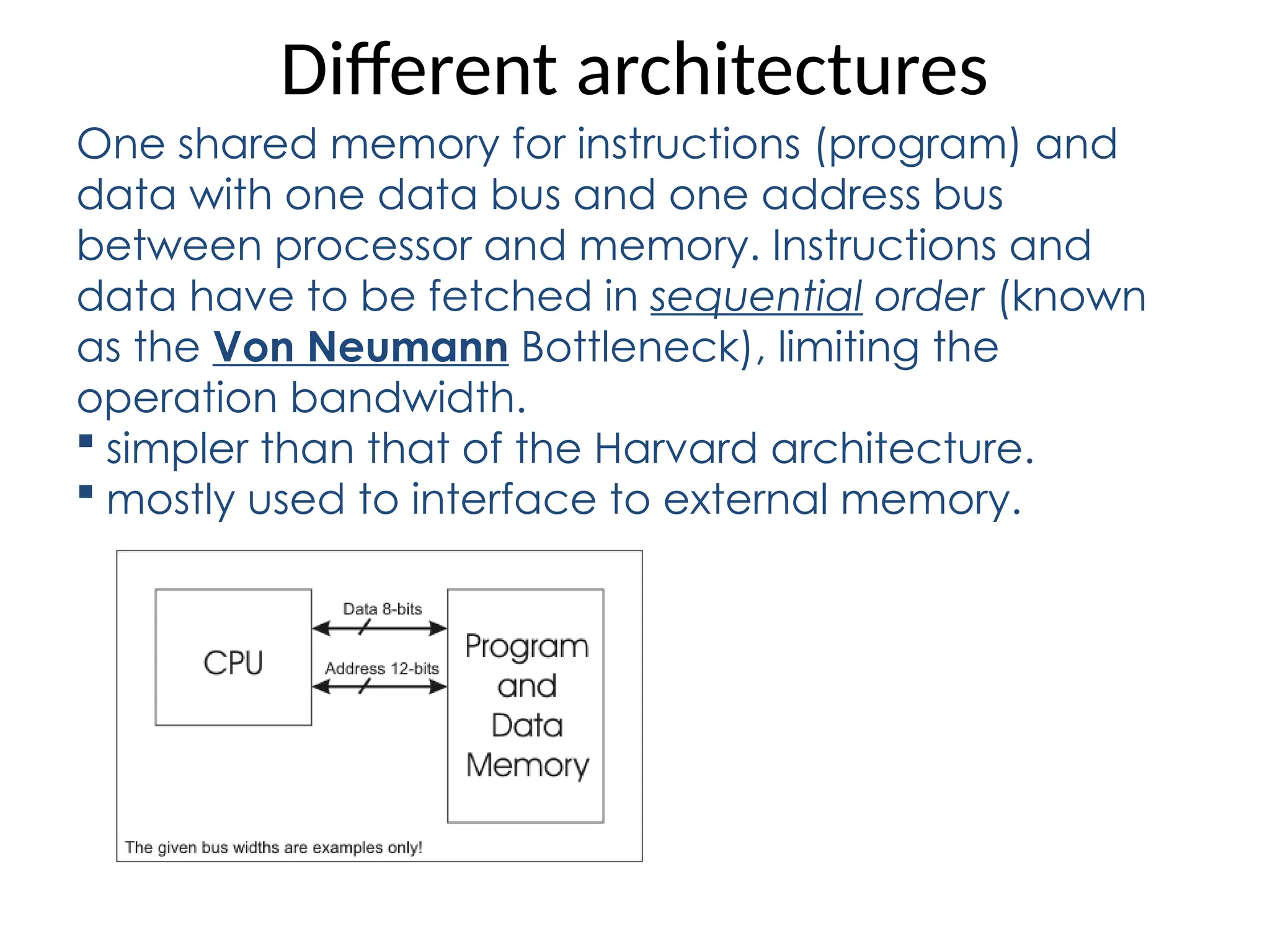
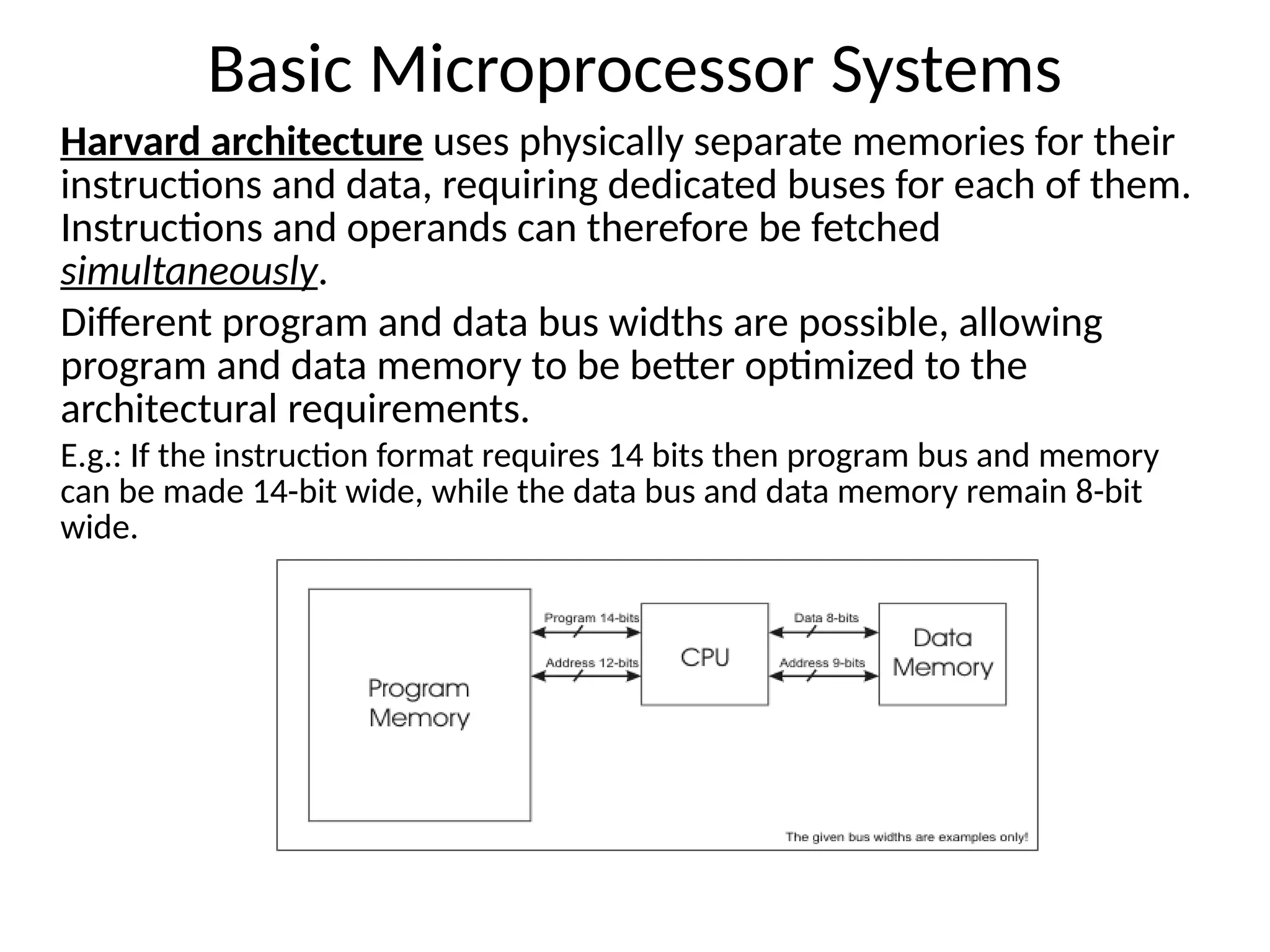
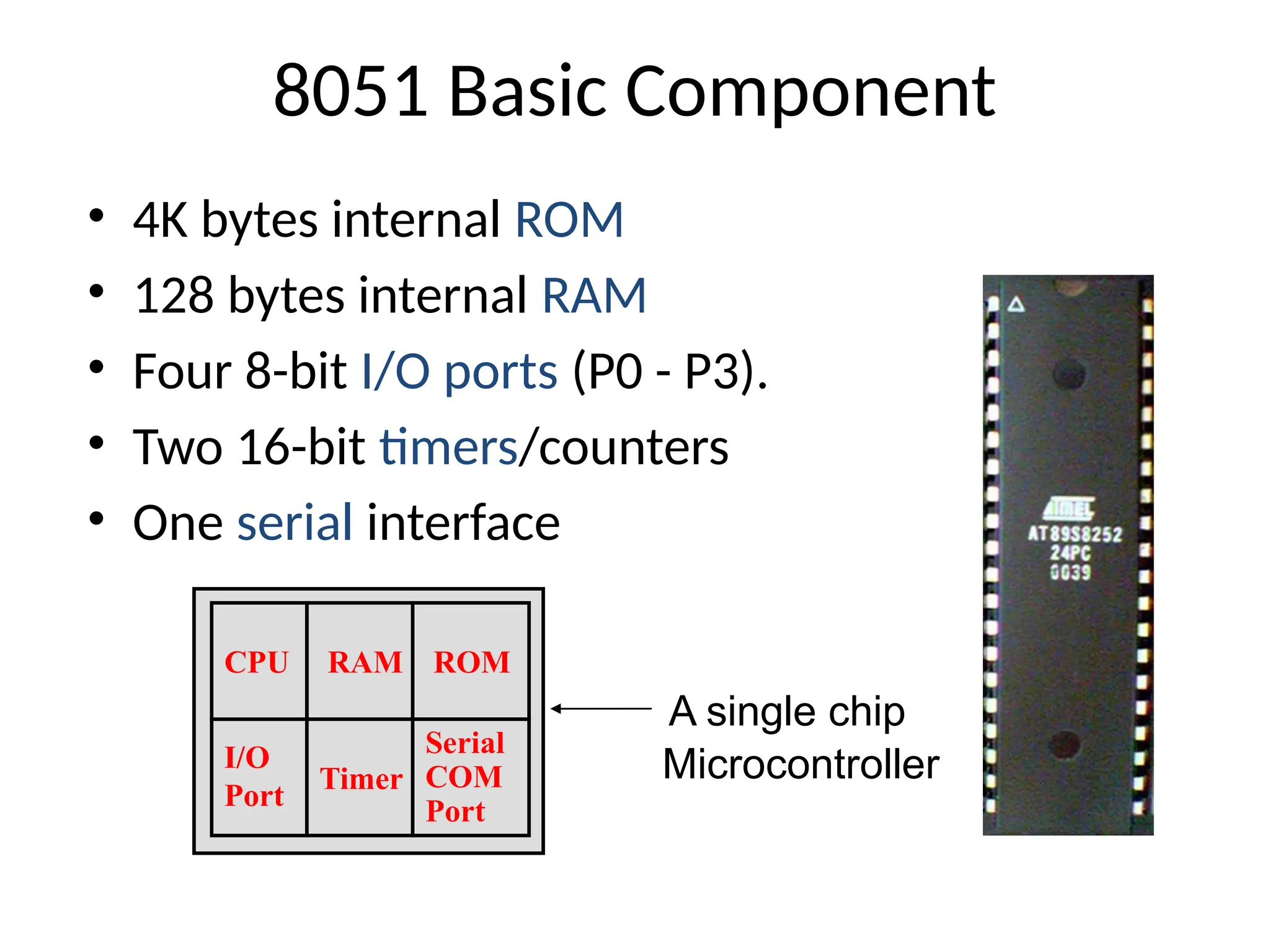
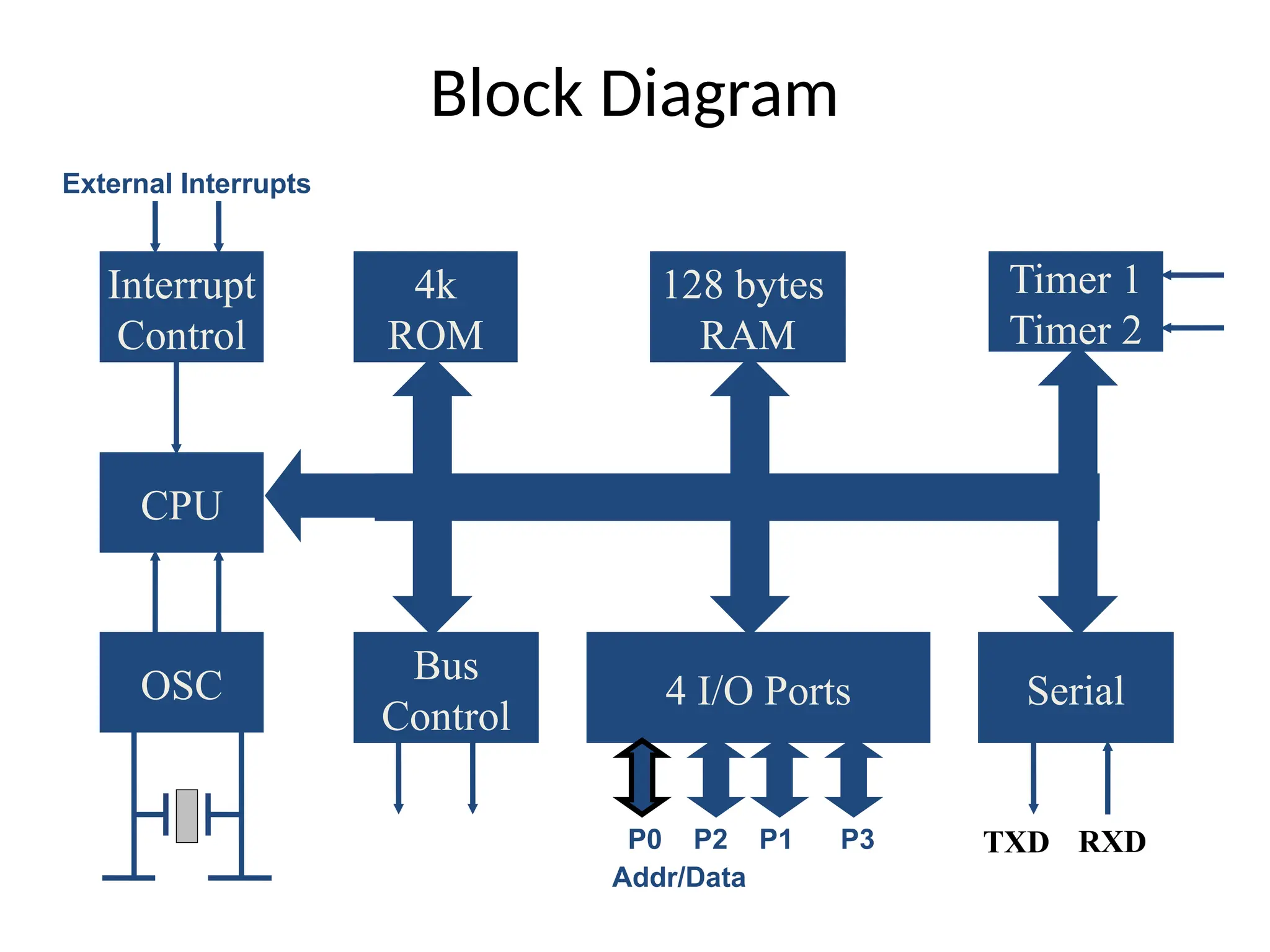
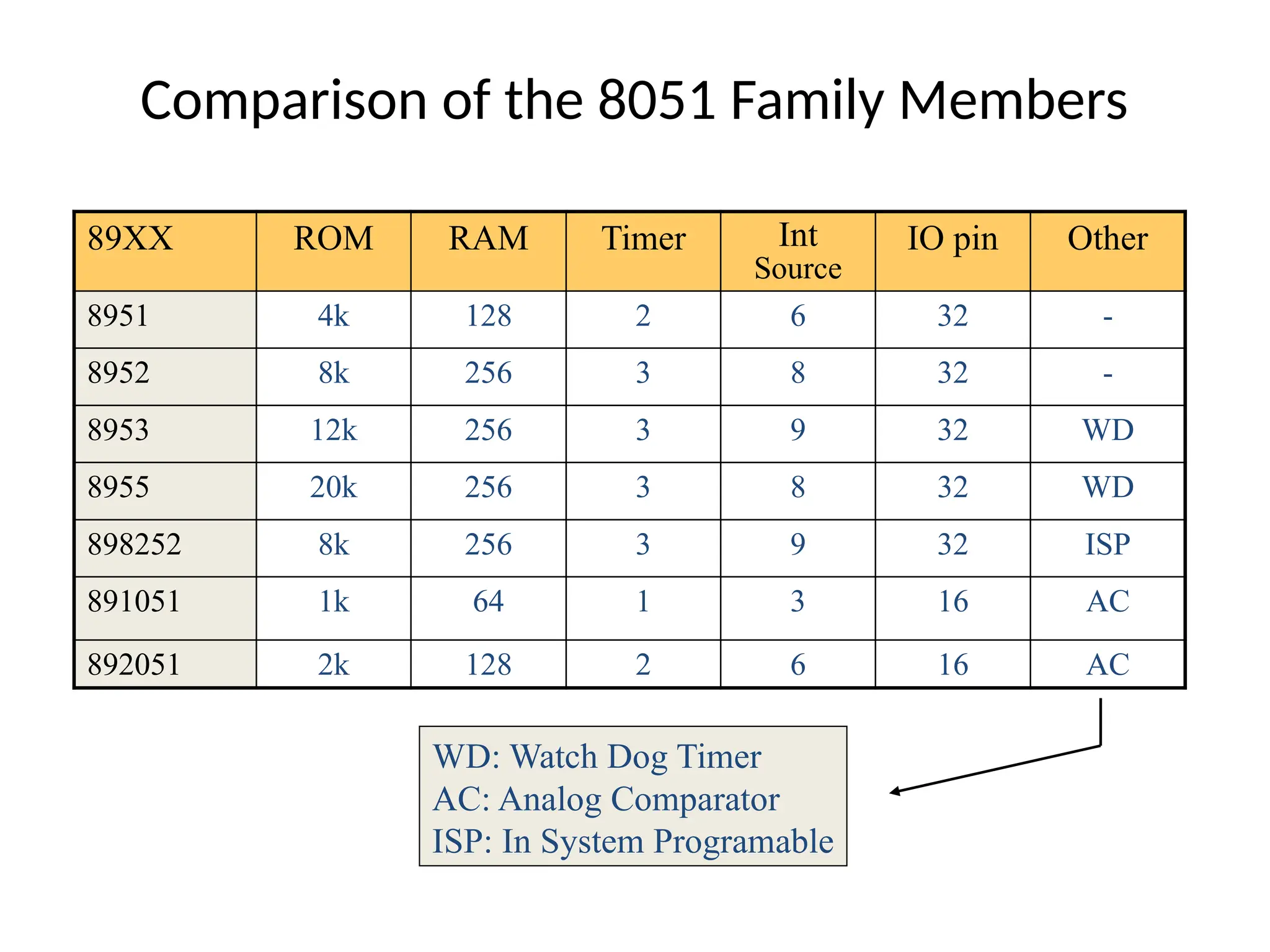
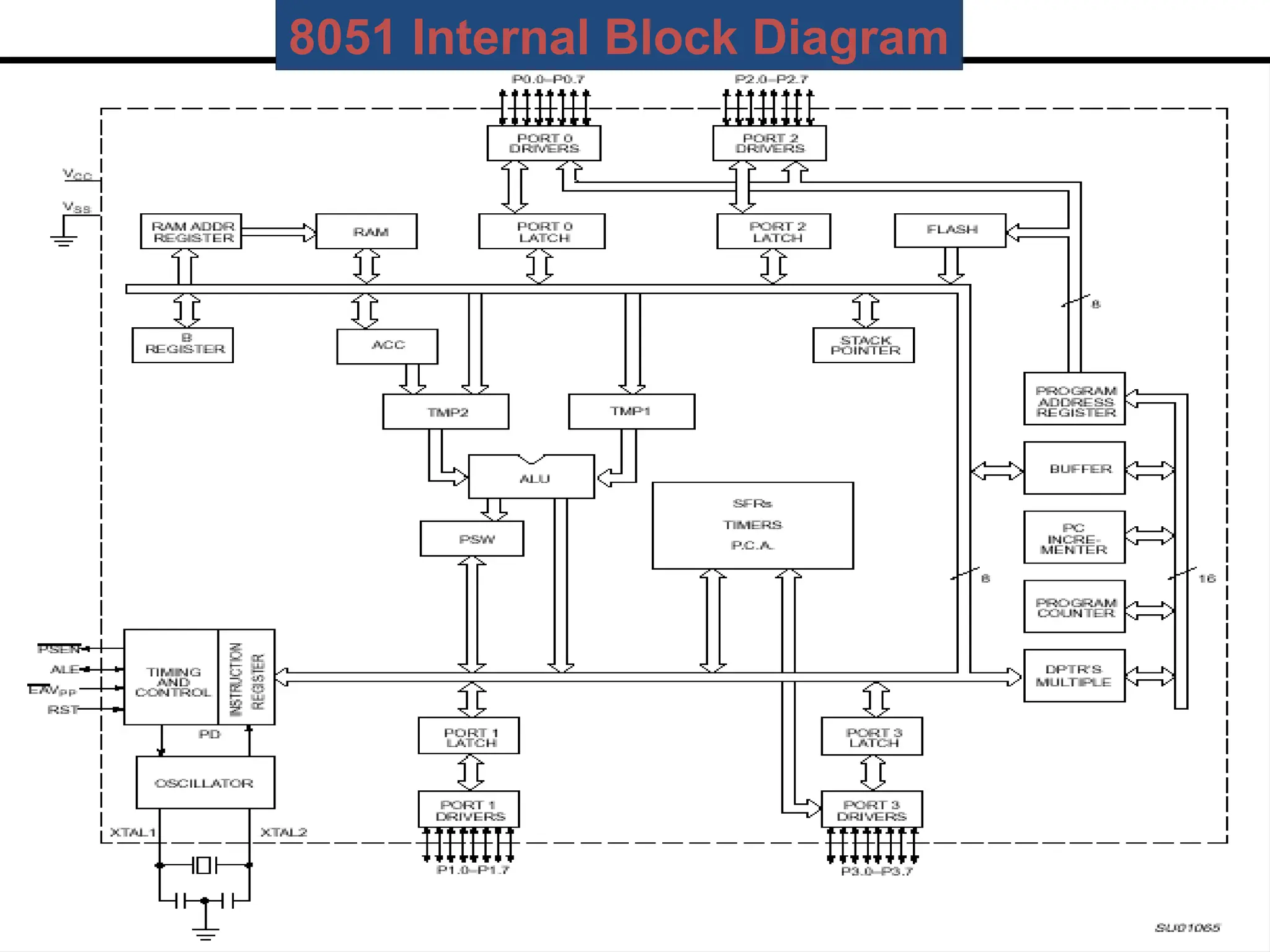
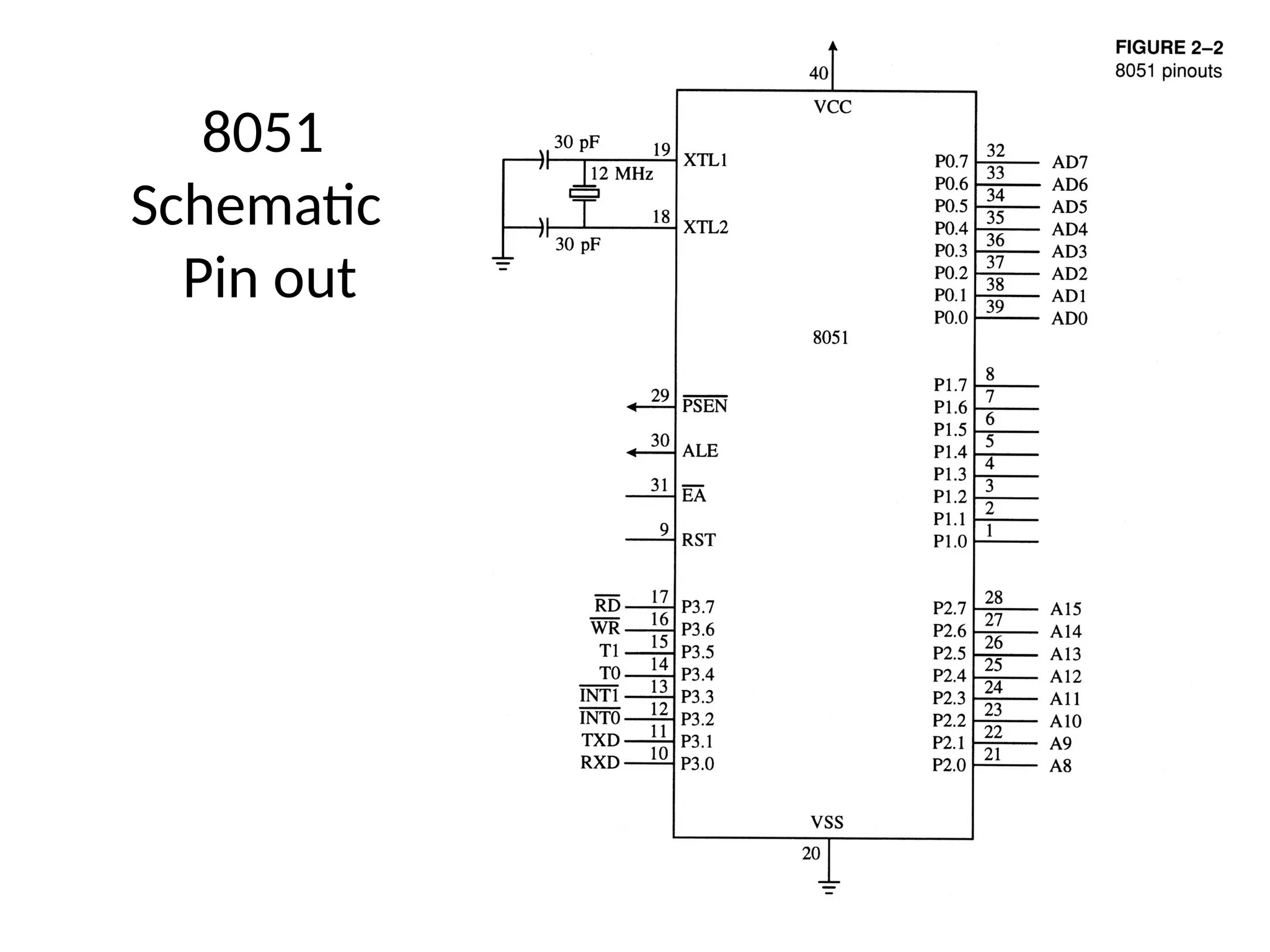
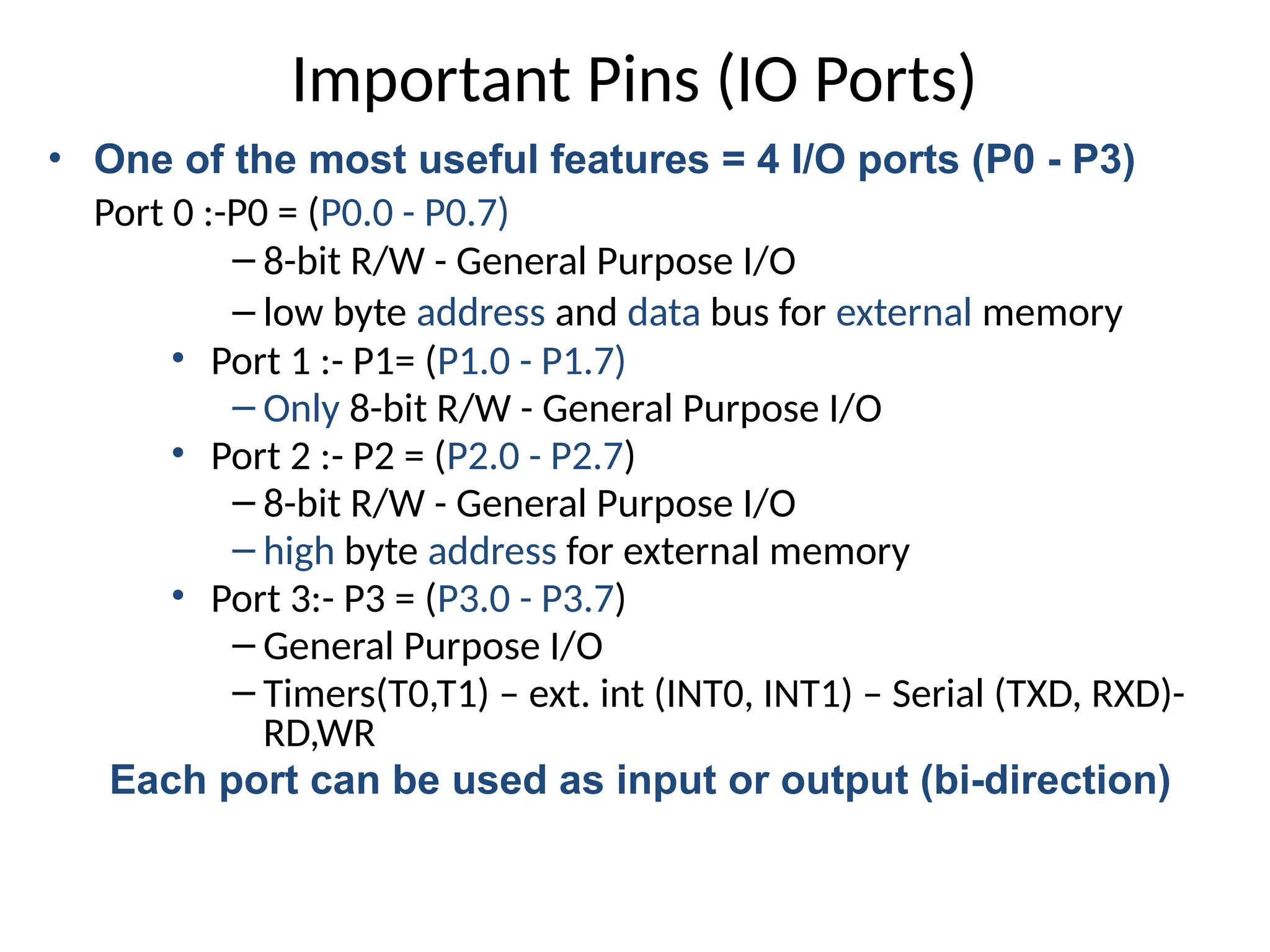
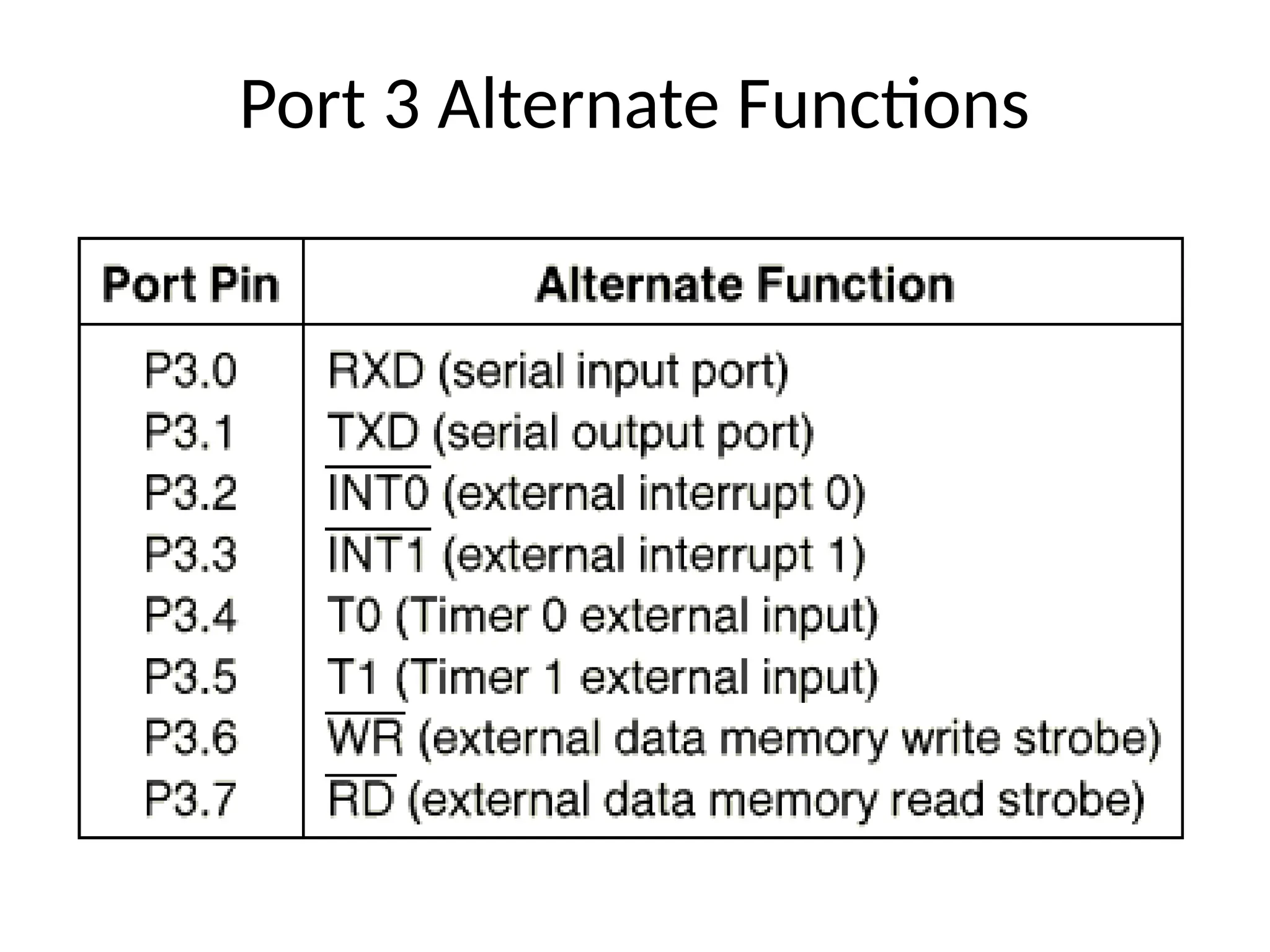
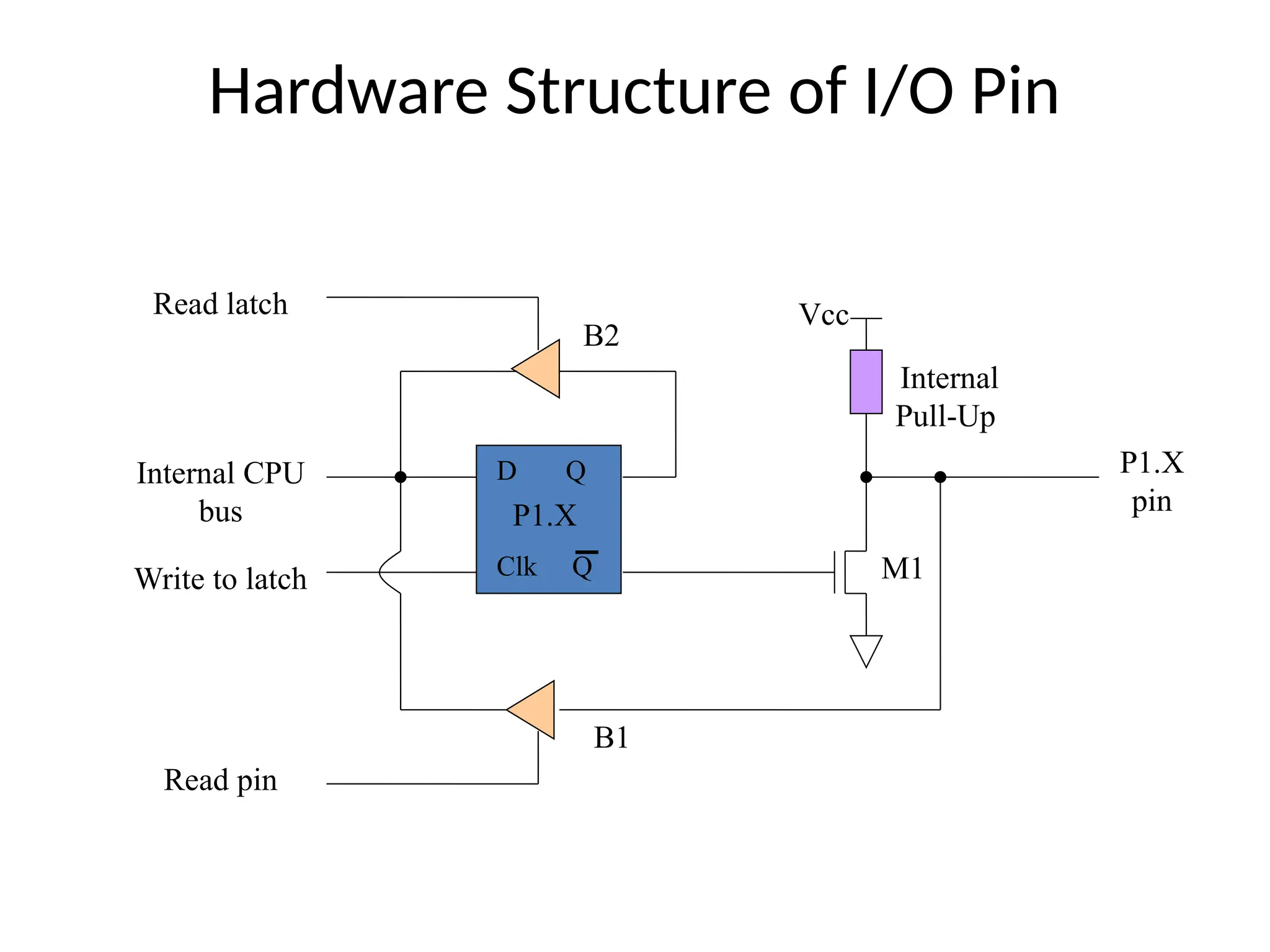
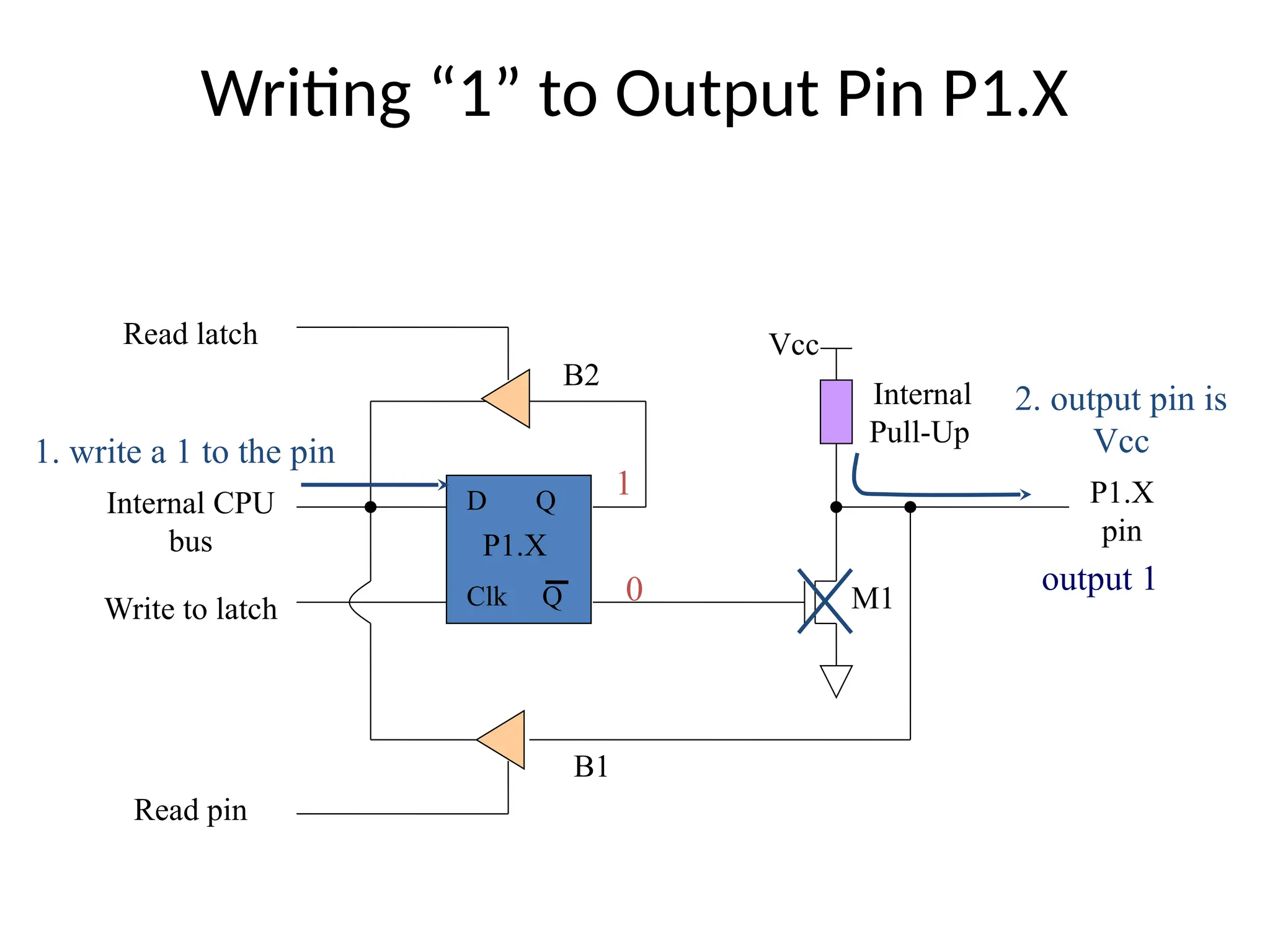
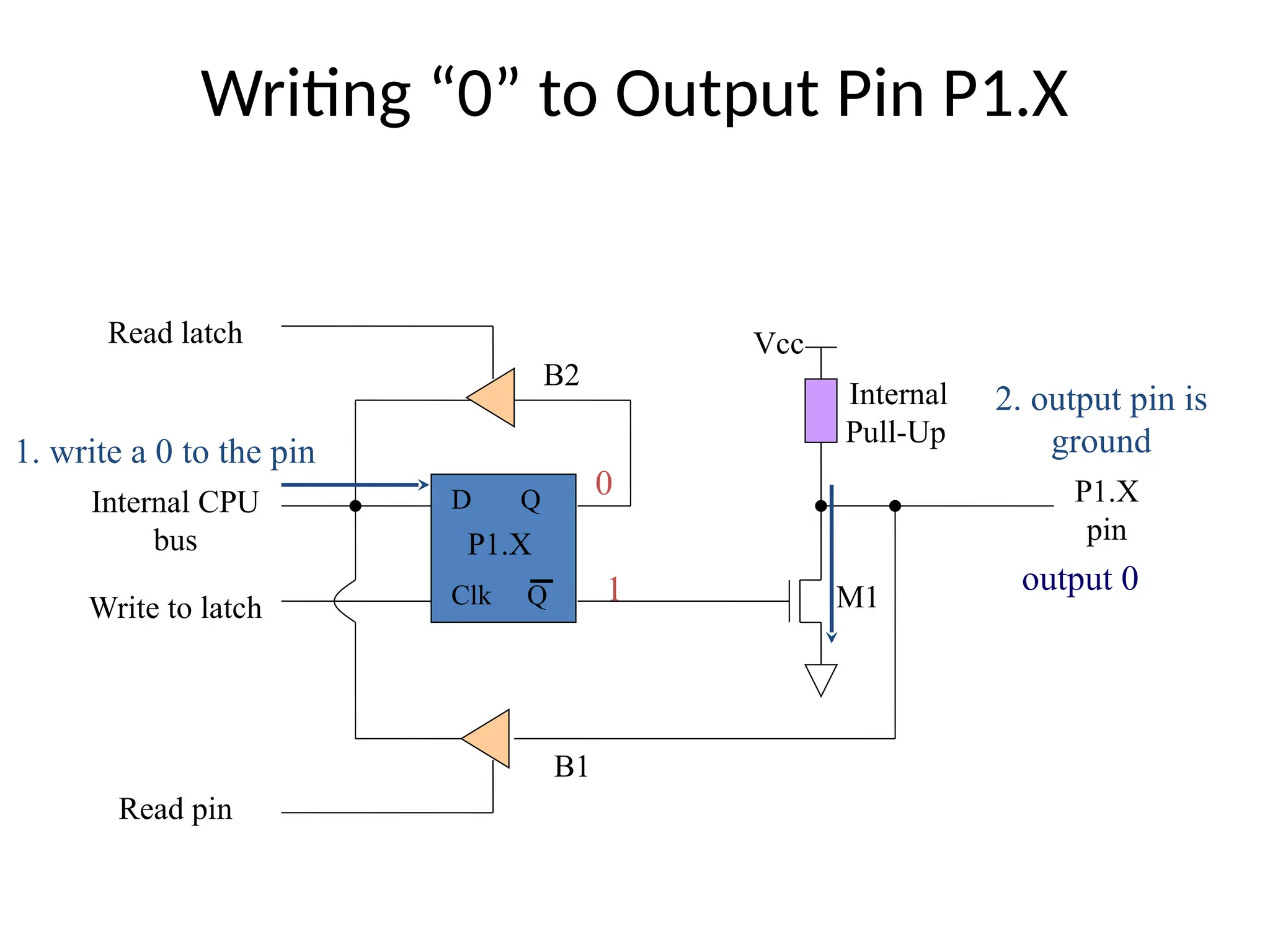
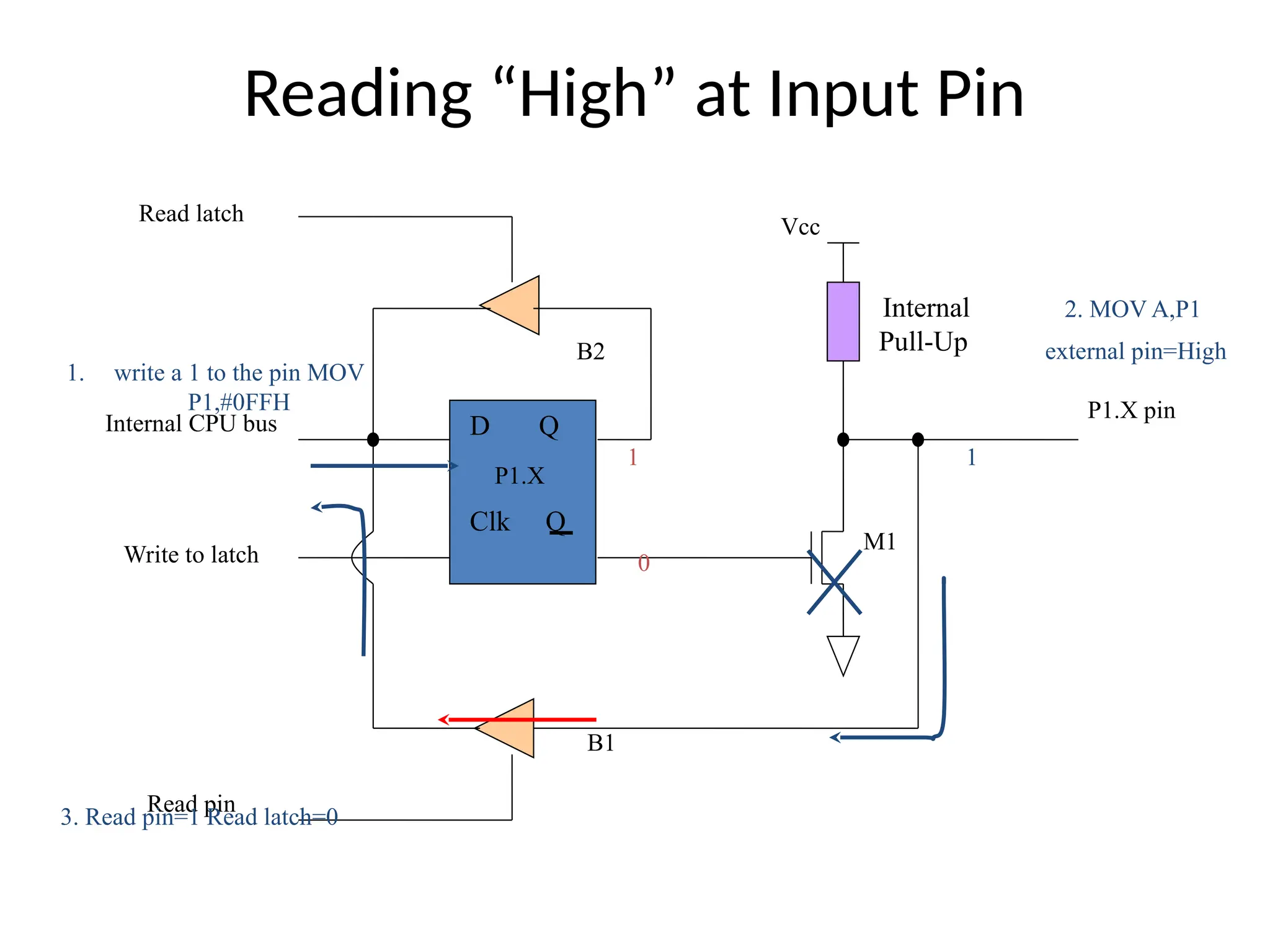
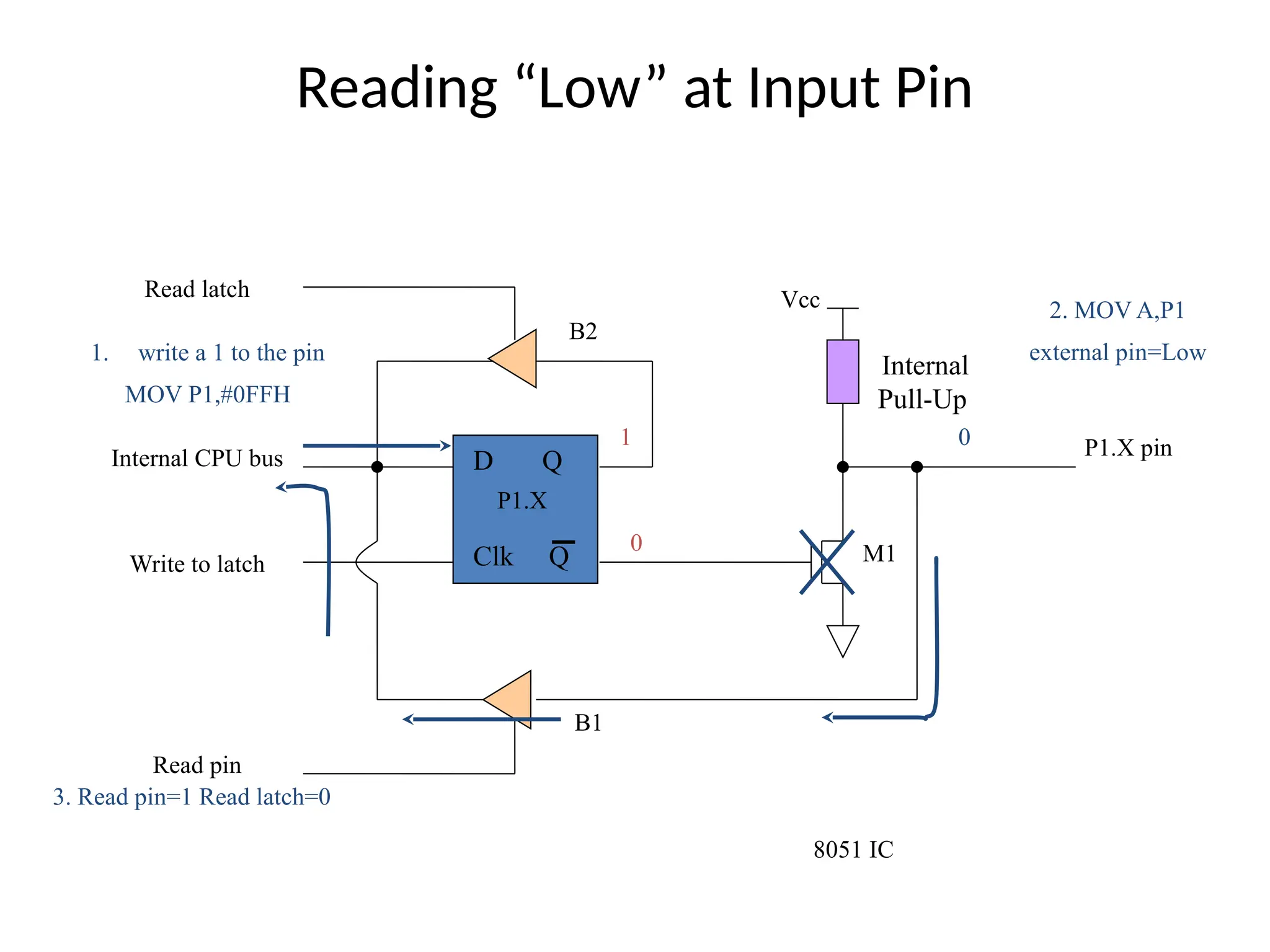
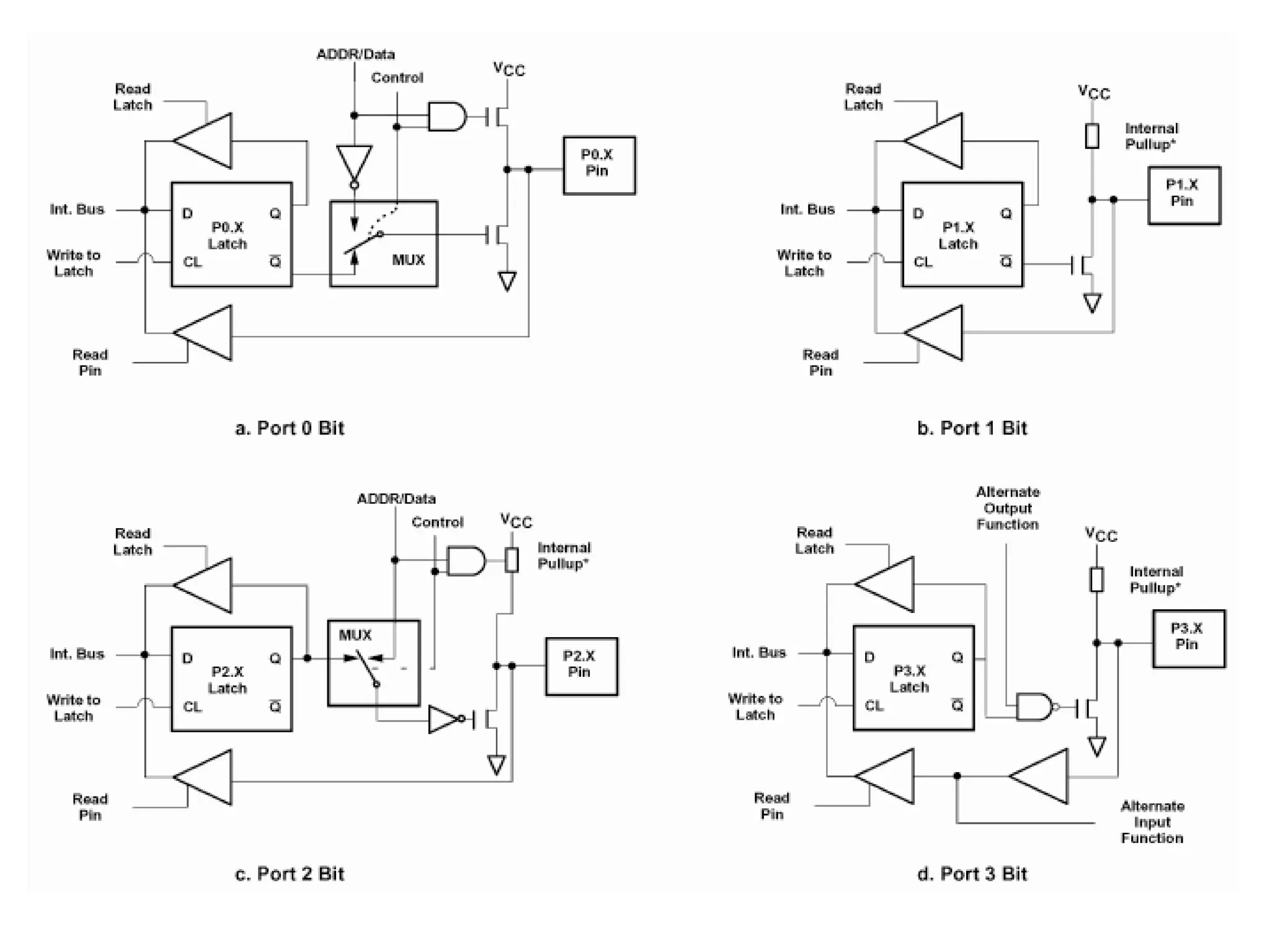
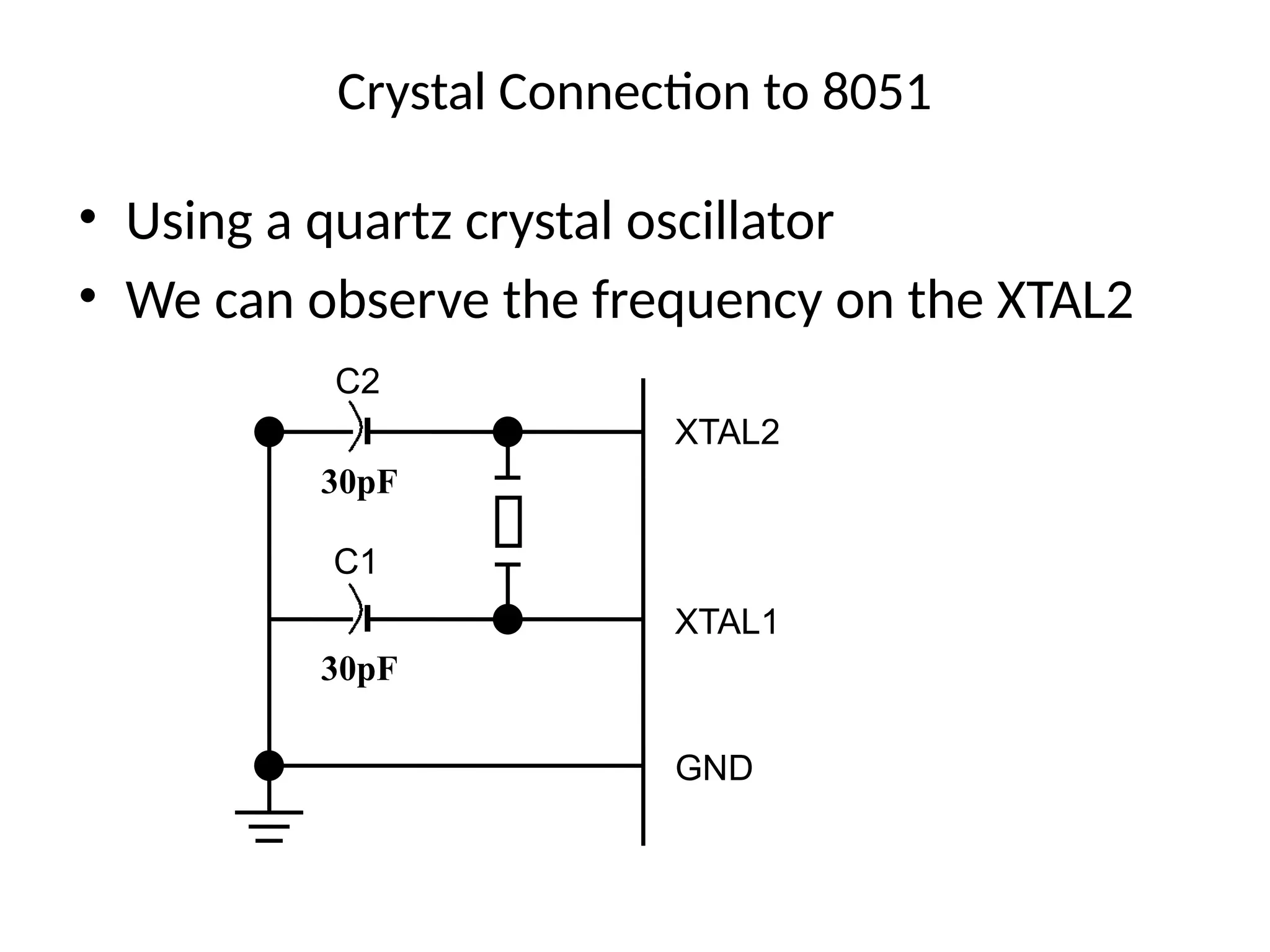
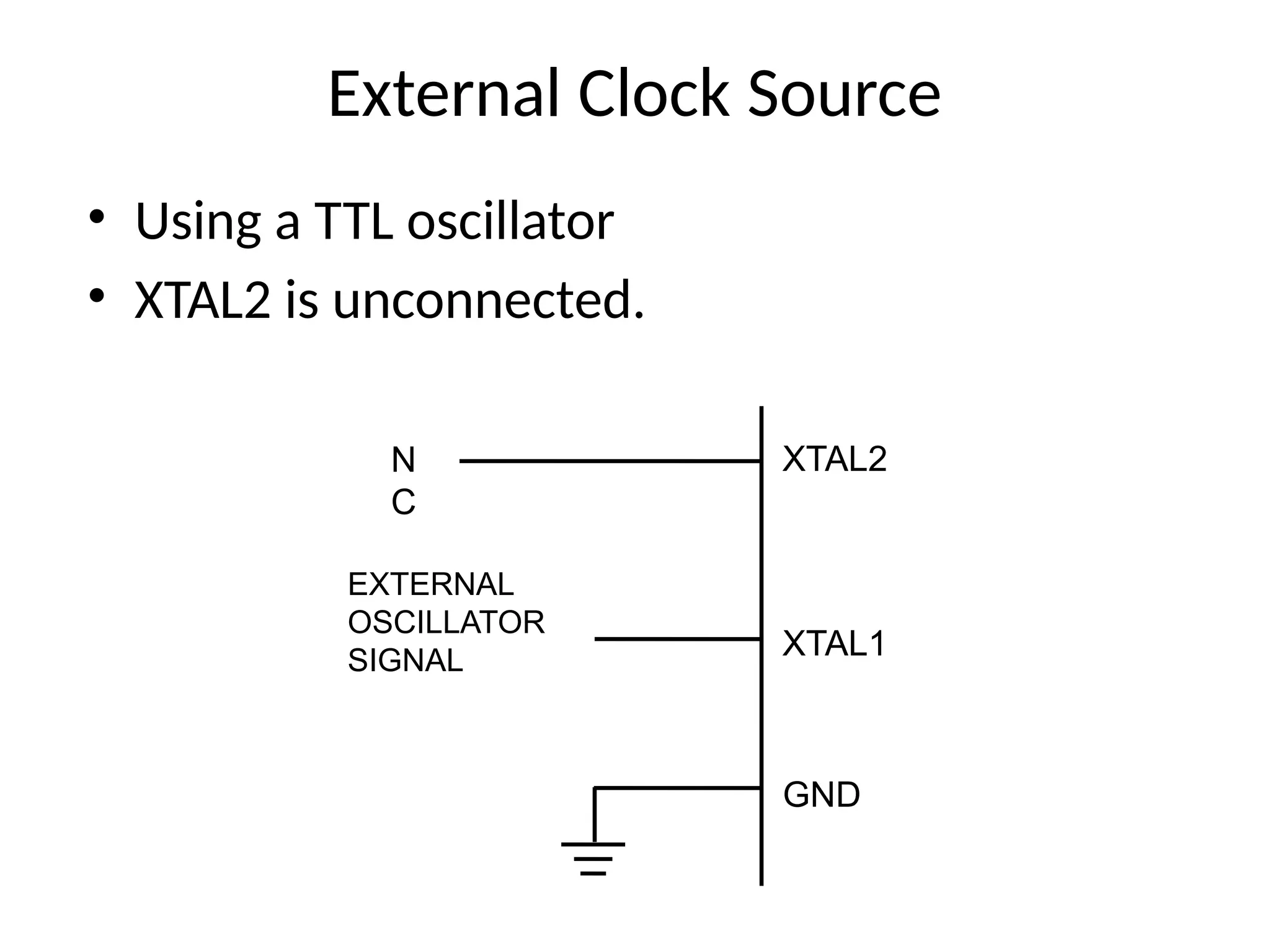
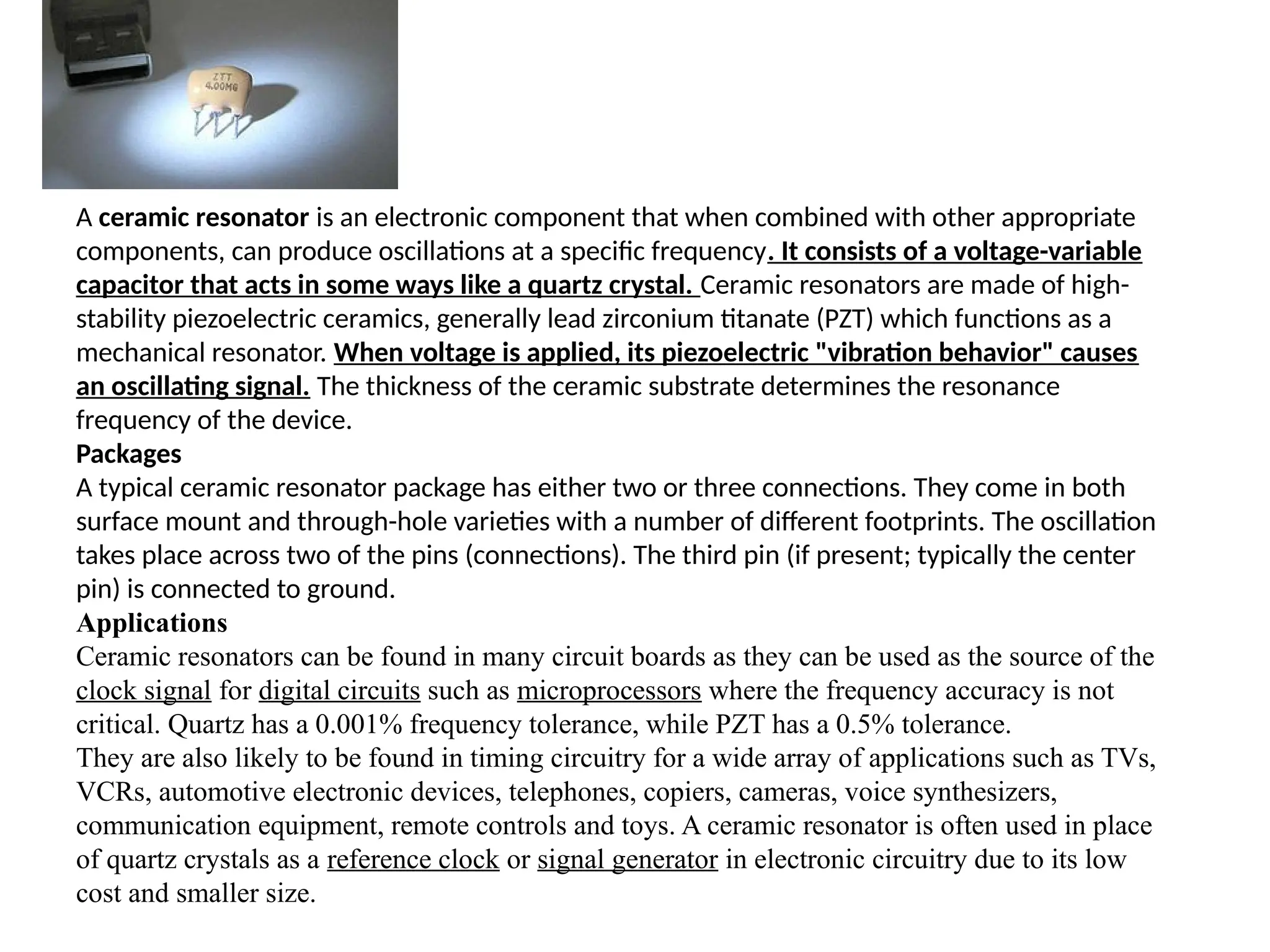
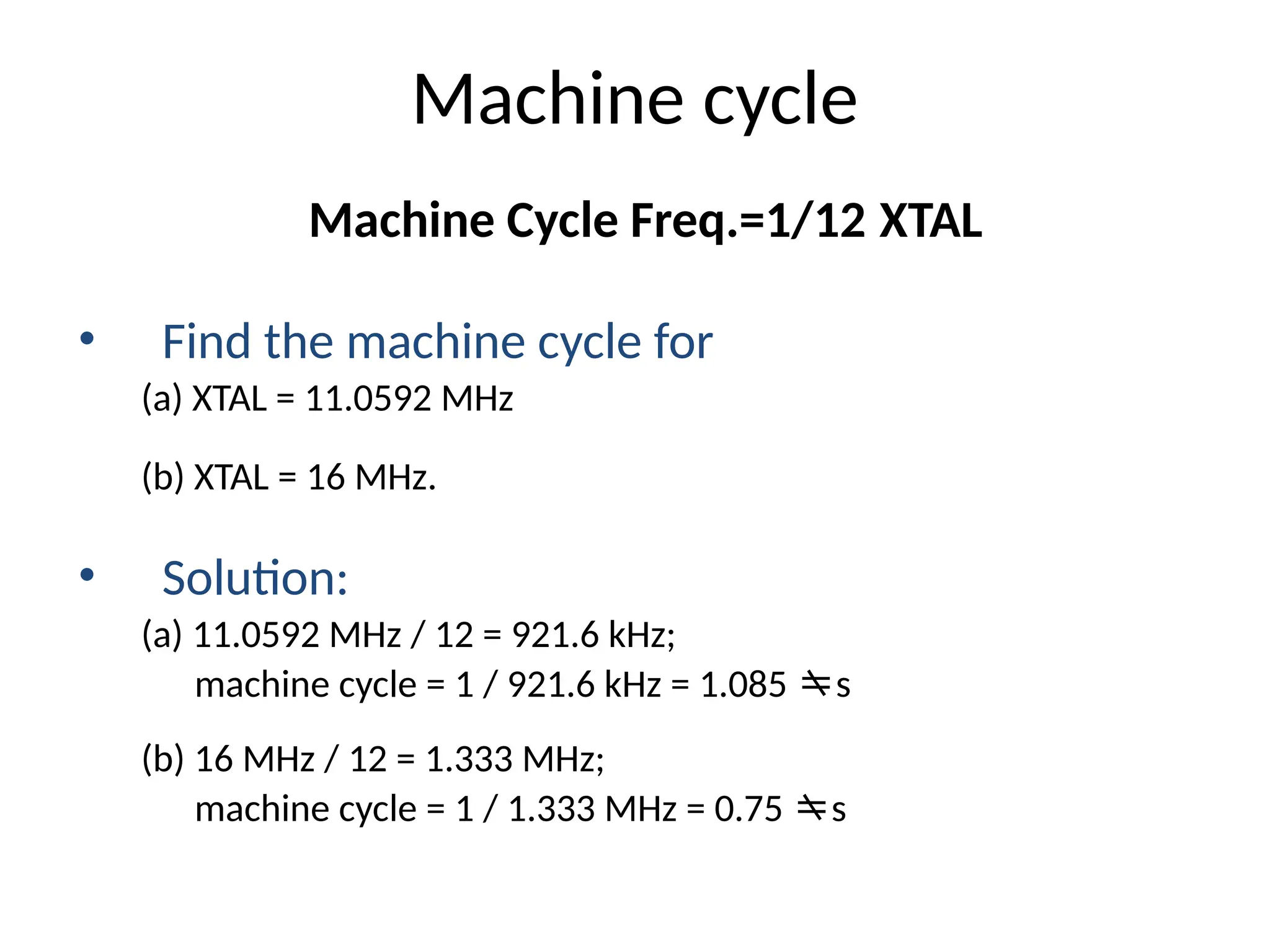
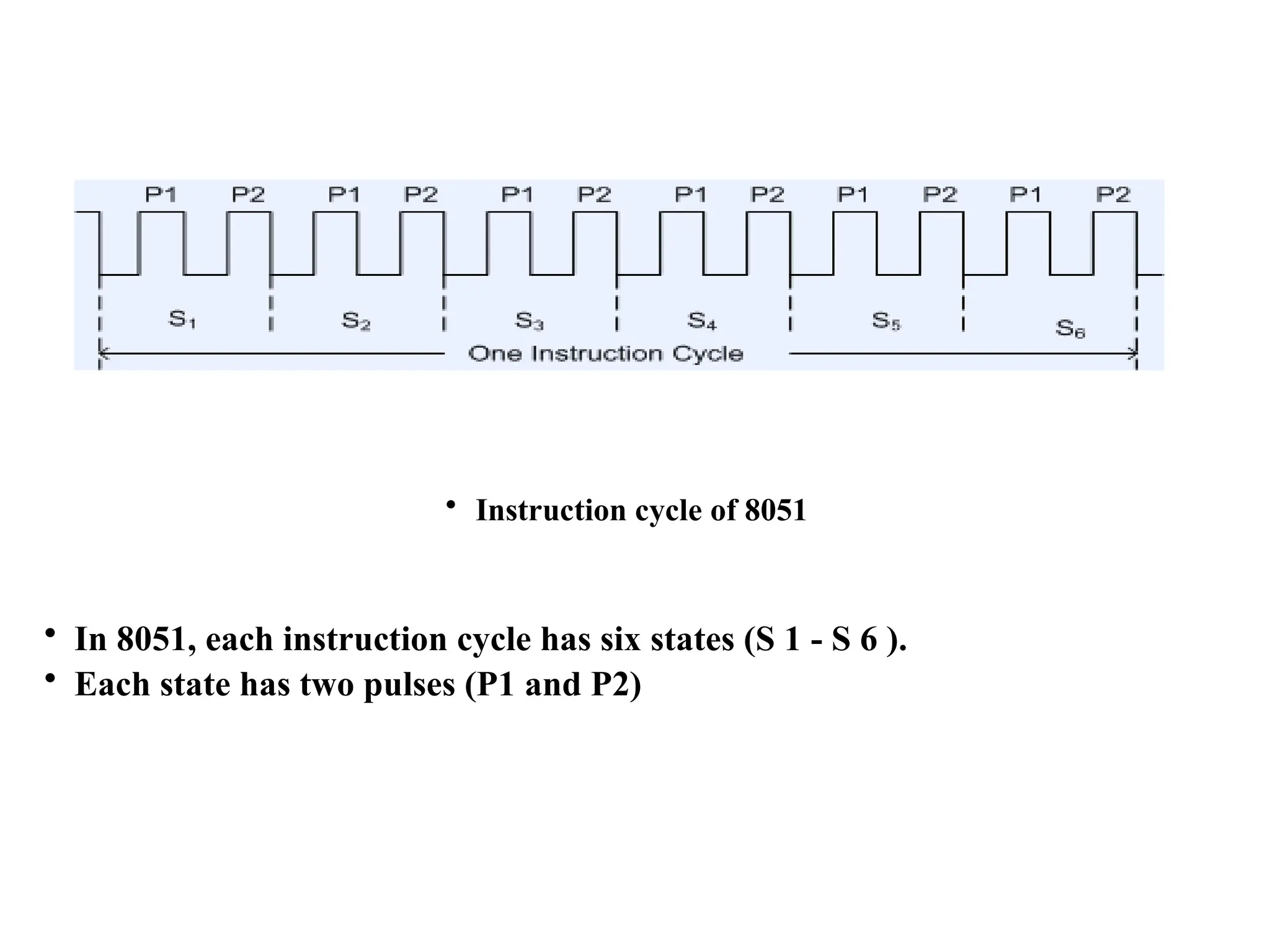
The document provides a comprehensive overview of the 8051 microcontroller, including its architecture, internal components, and types of microcontrollers. It outlines the differences between microprocessors and microcontrollers, details various 8051 features such as memory, I/O ports, timers, and programming modes, and describes system packaging. Additionally, it discusses criteria for selecting a microcontroller and compares different members of the 8051 family.