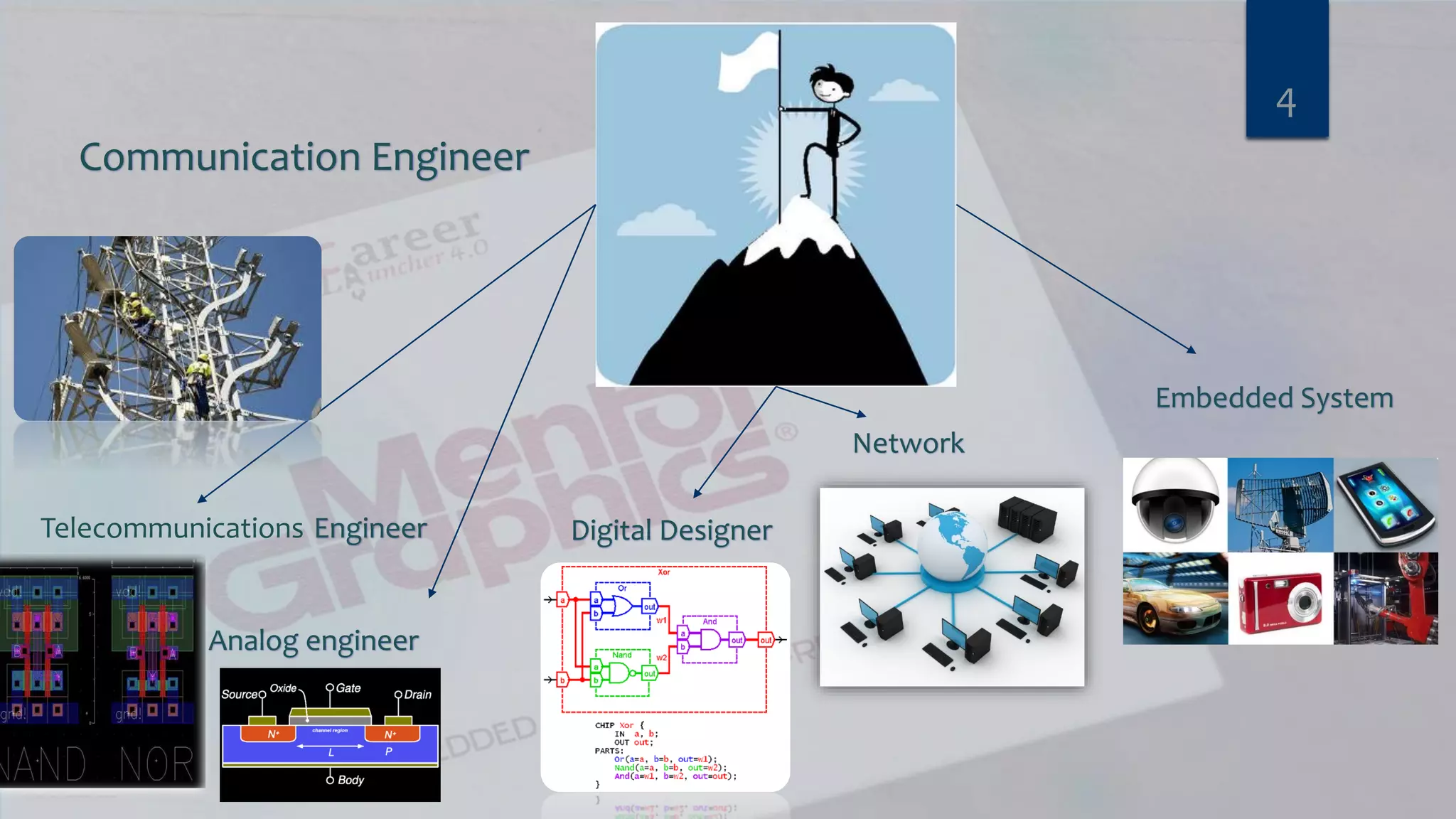
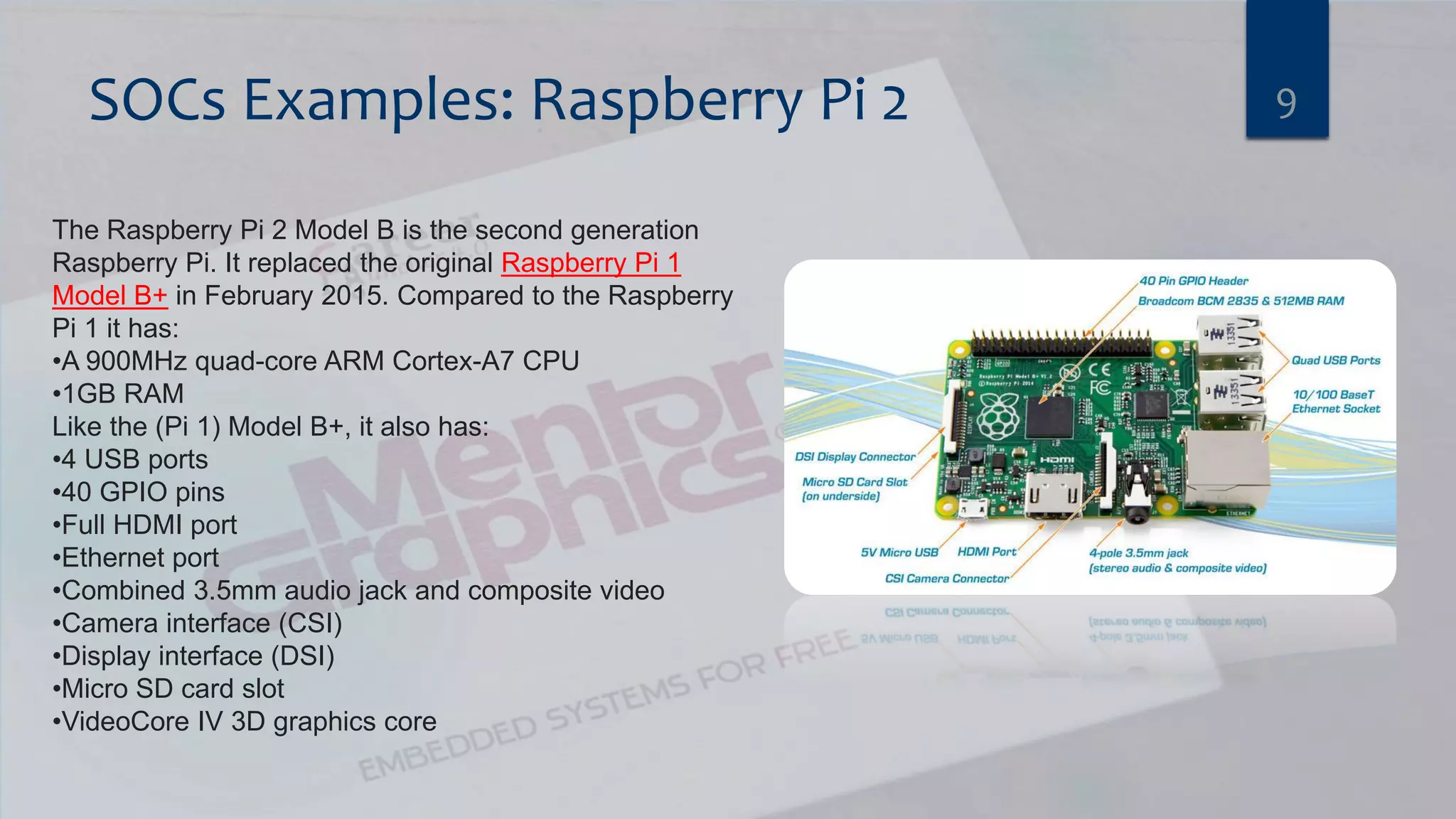
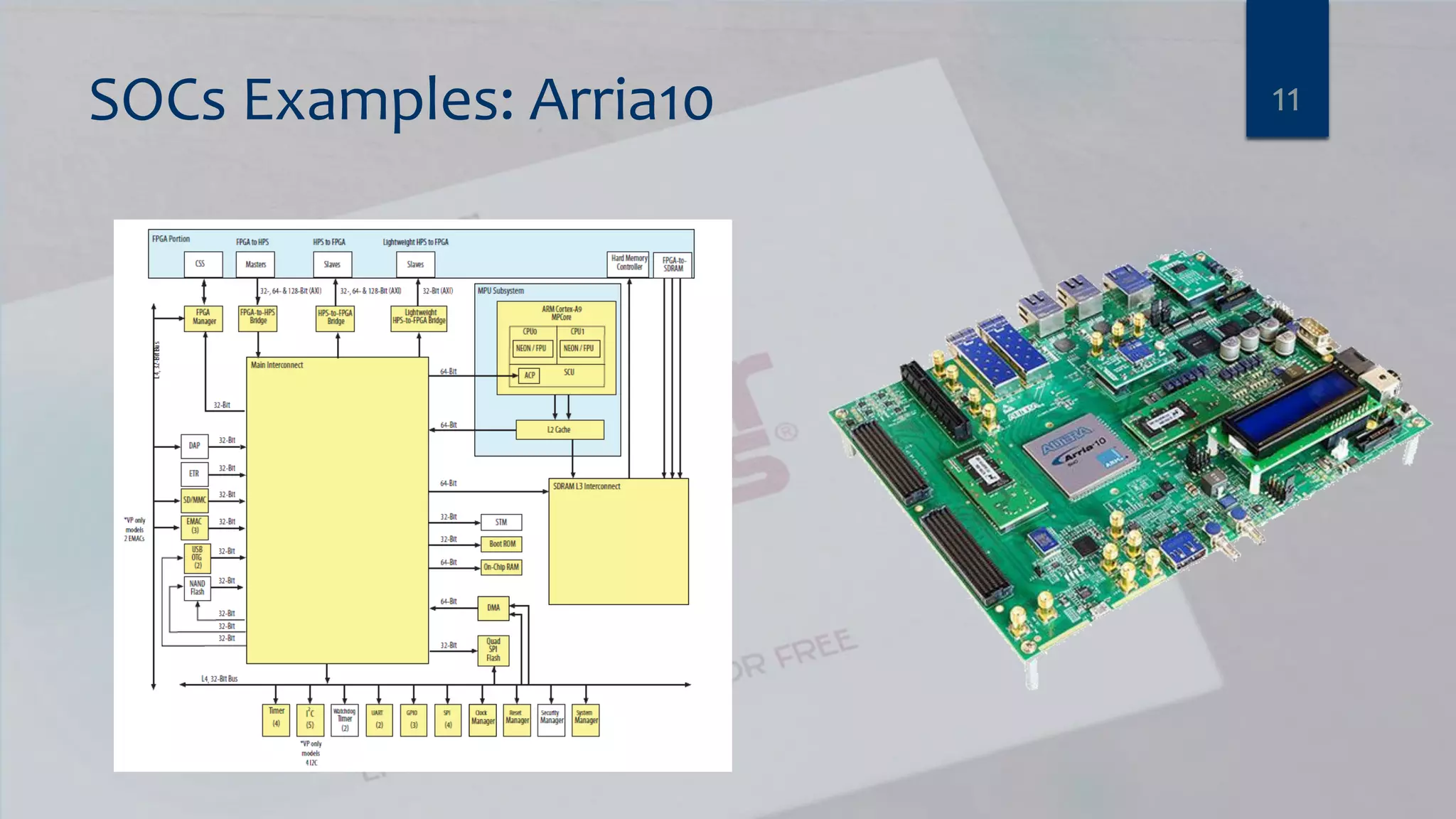
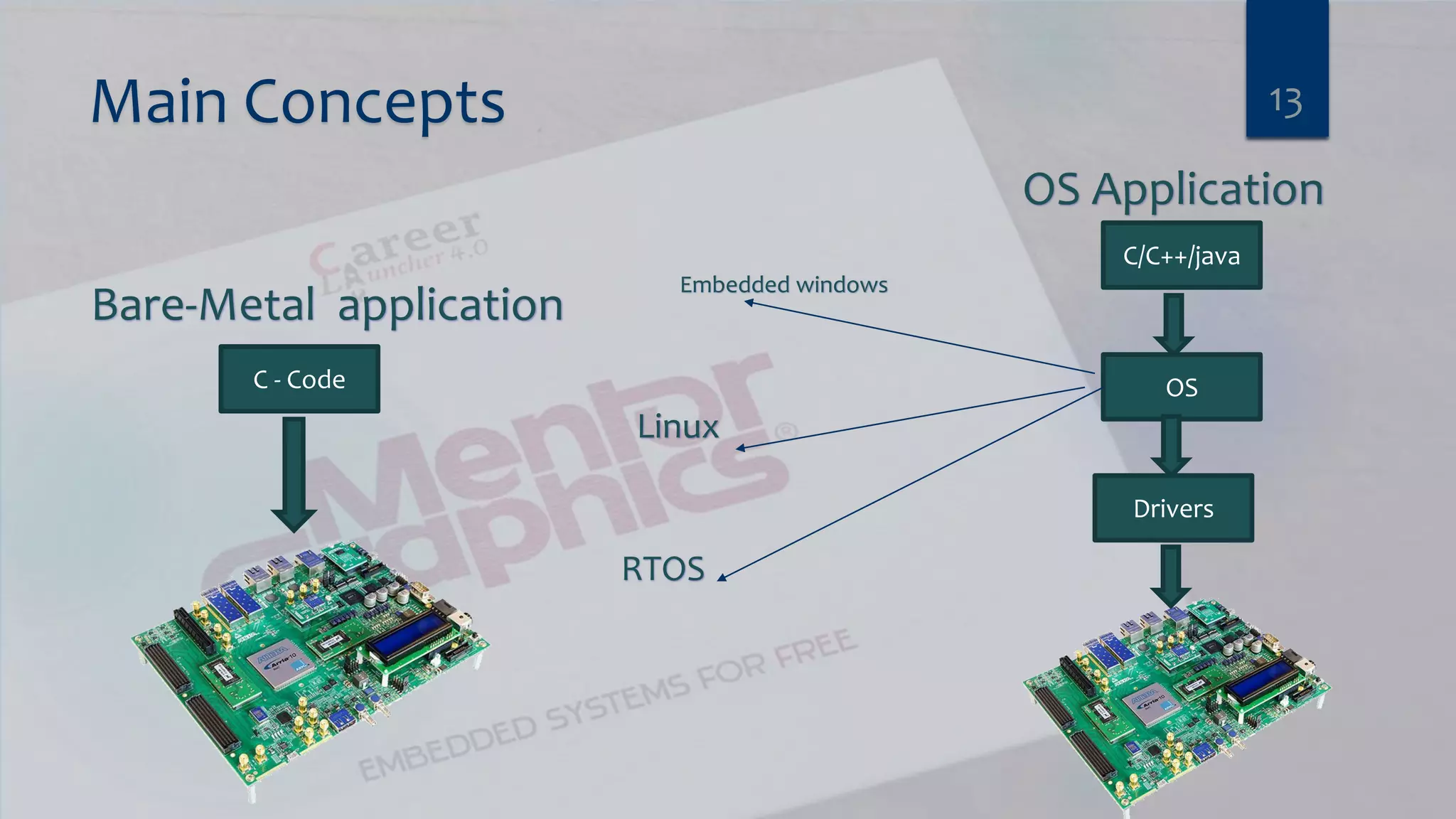
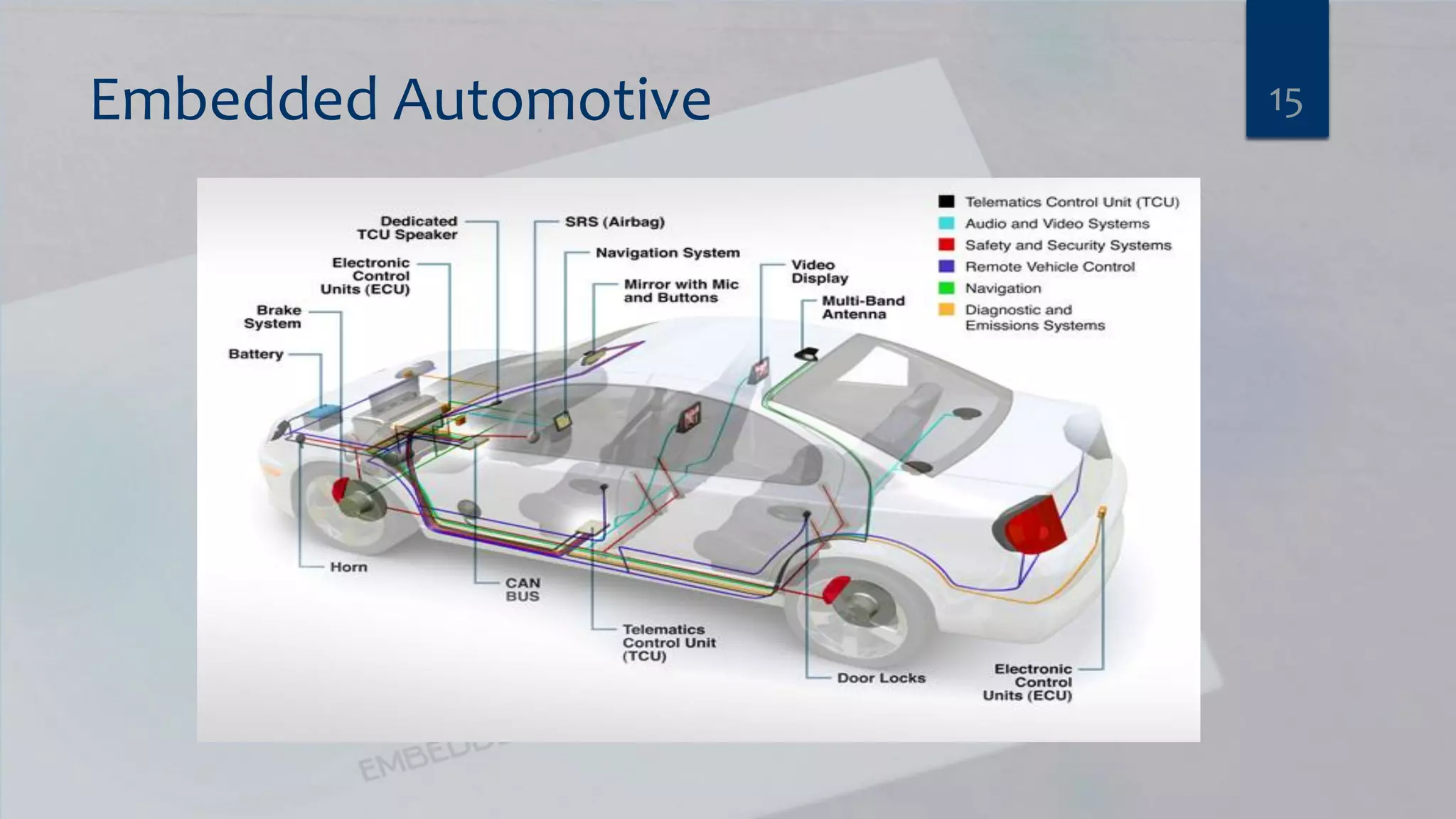
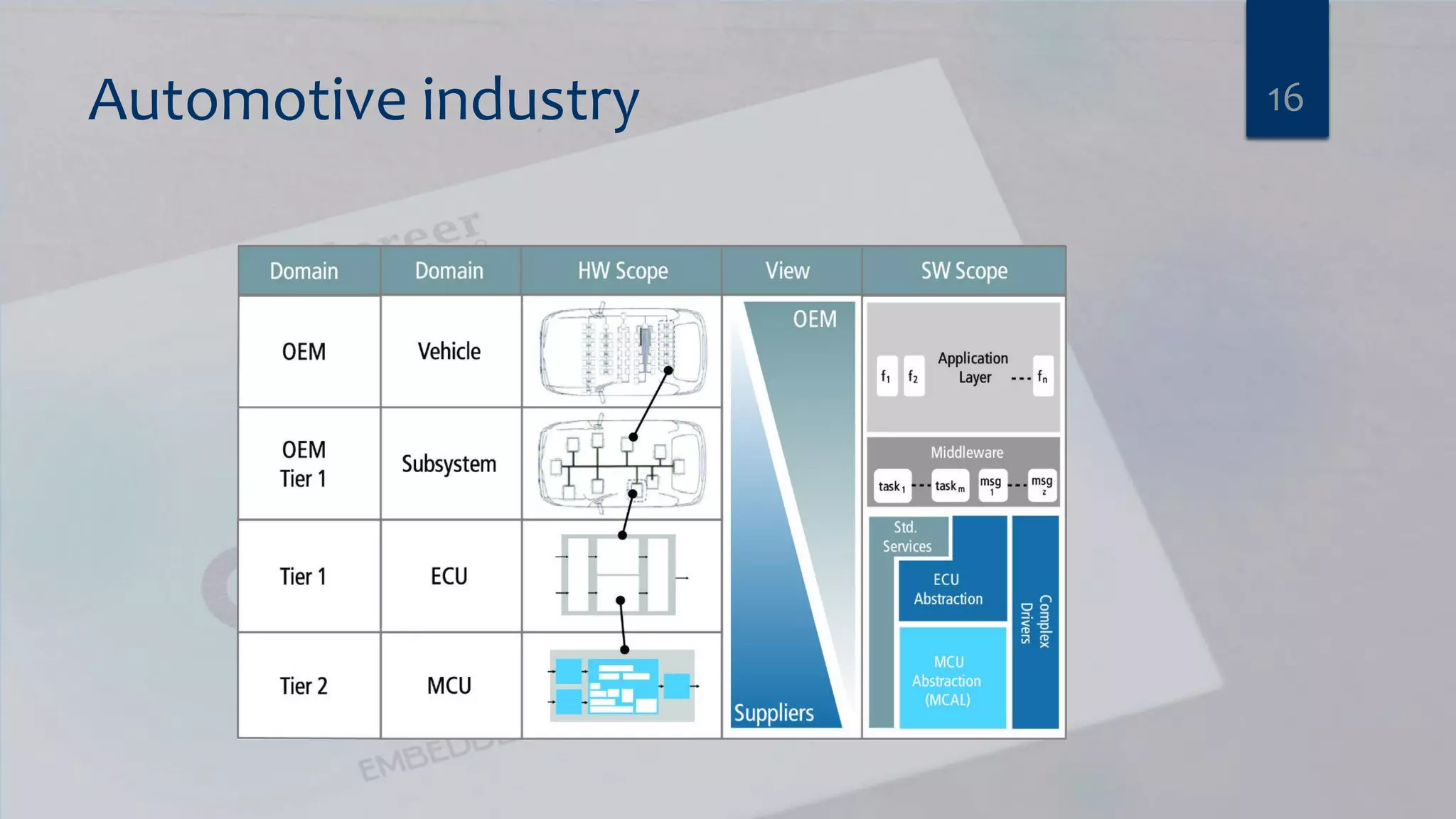
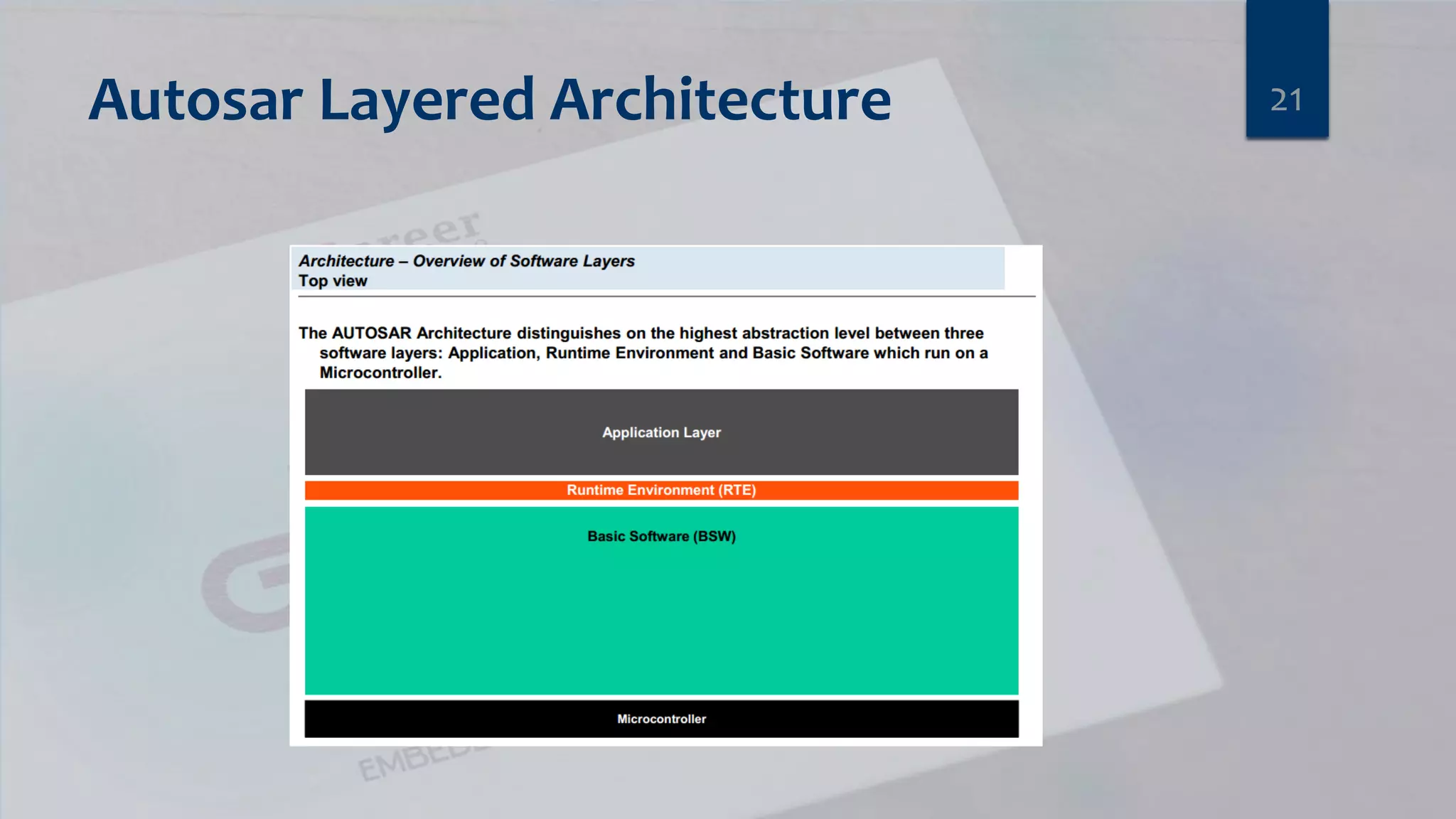
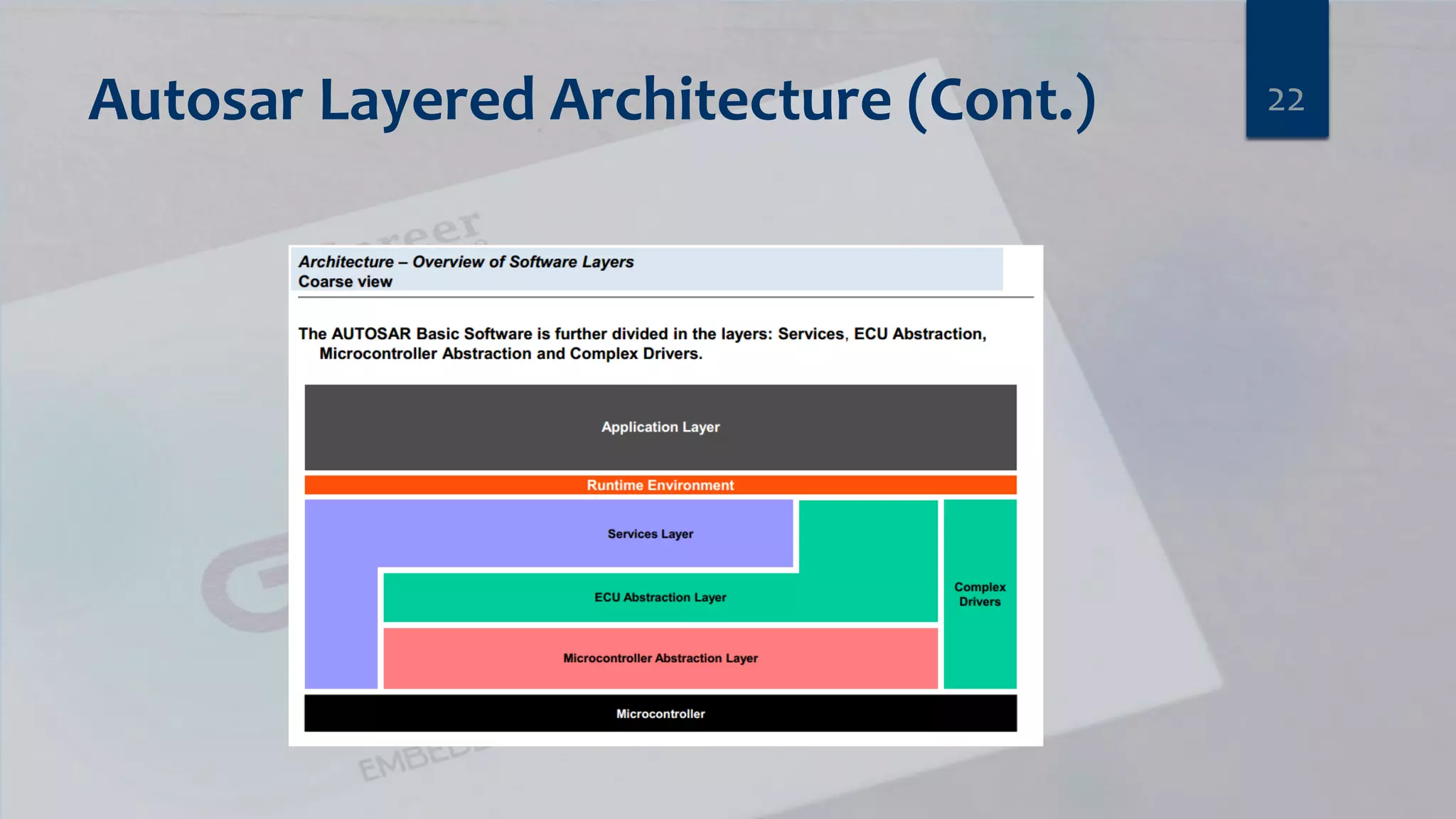
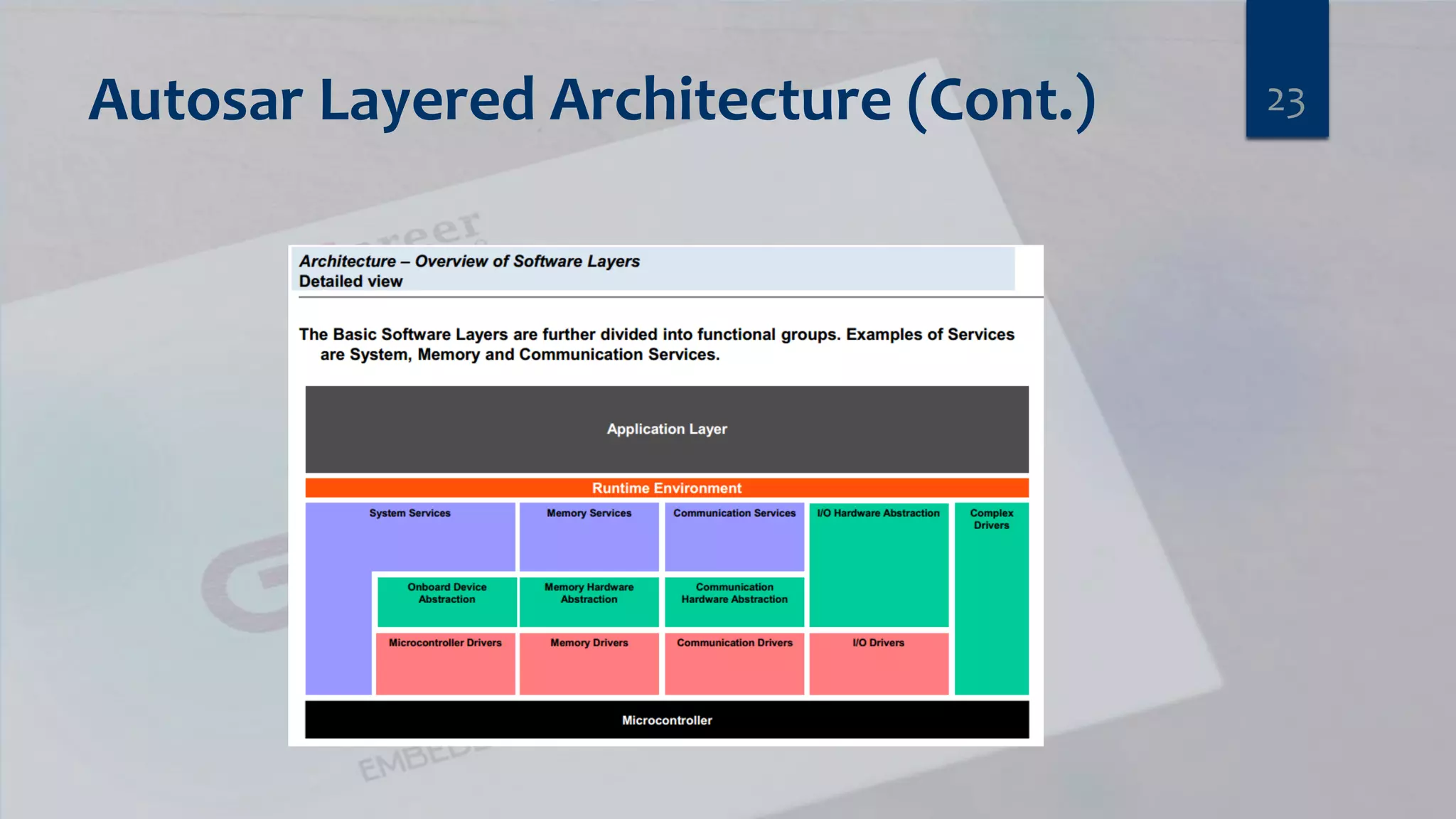
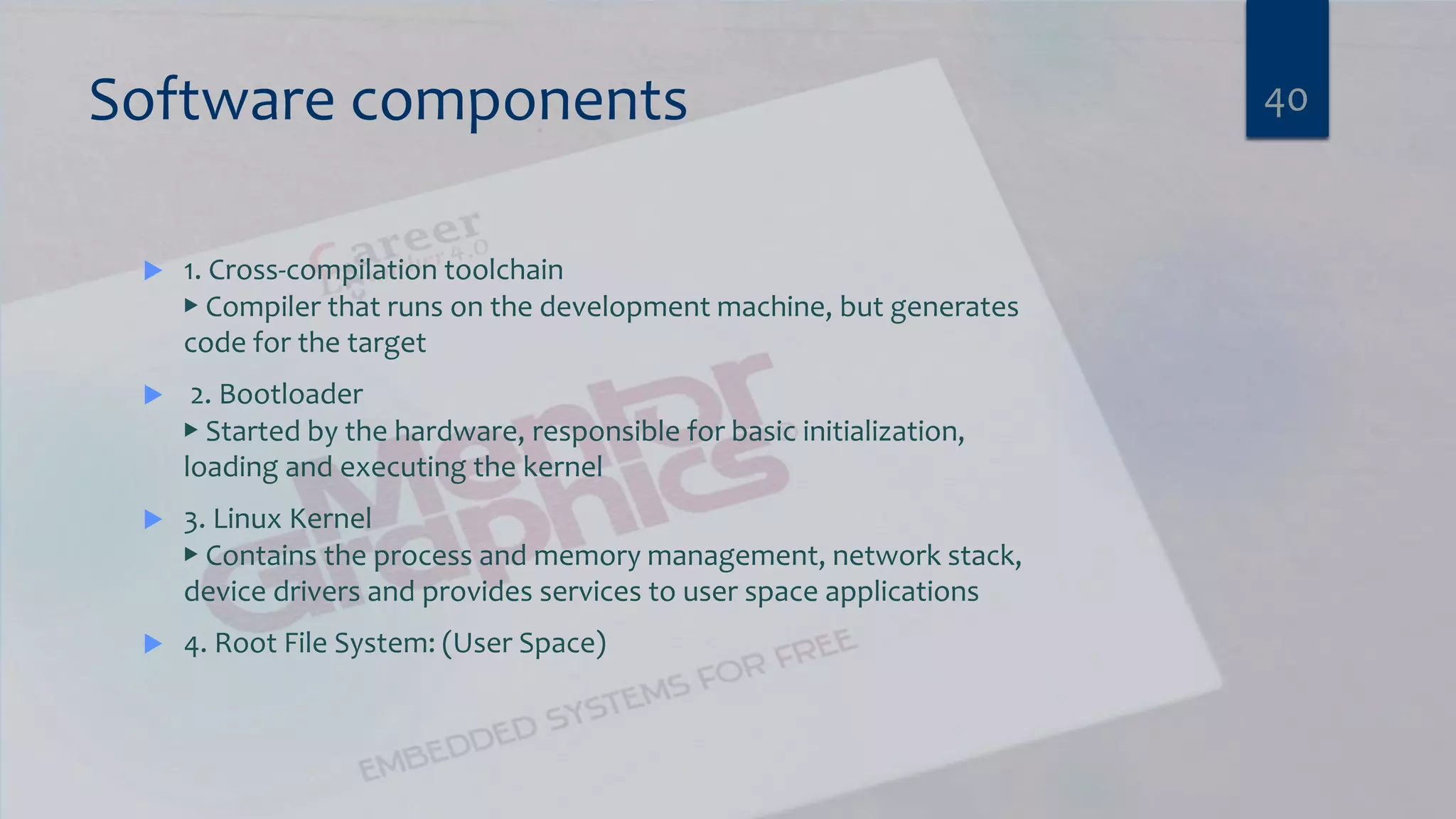
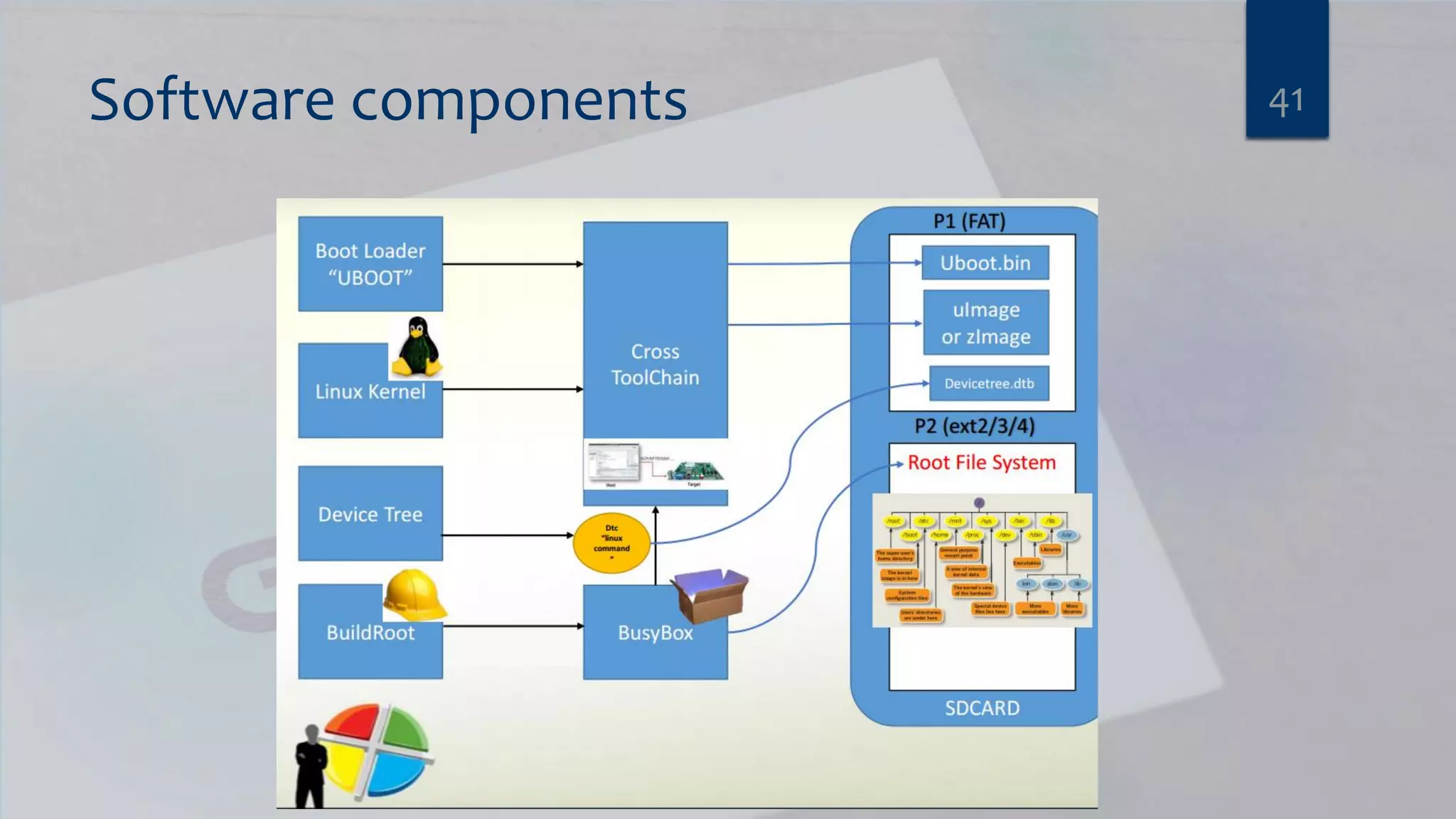
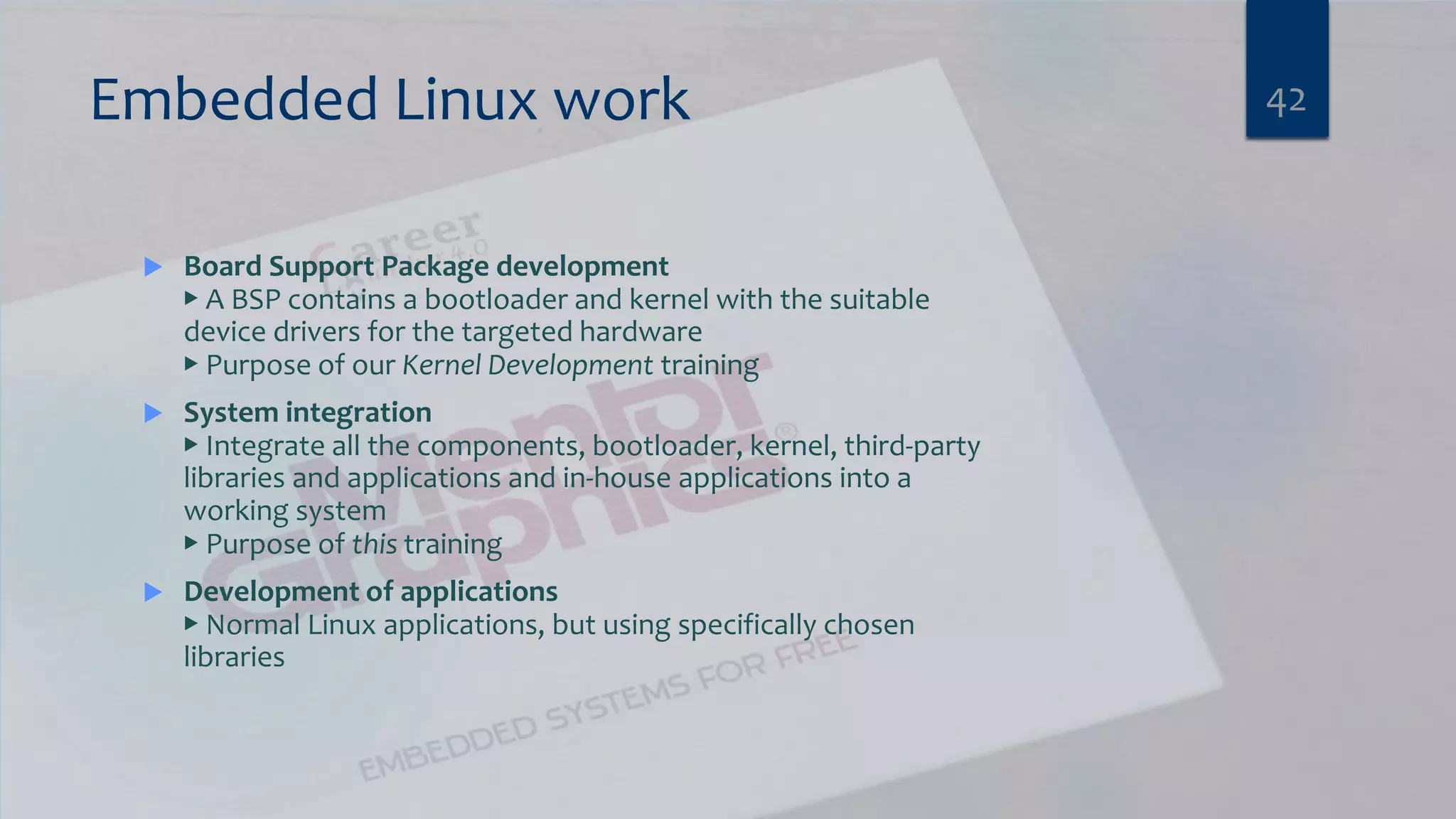
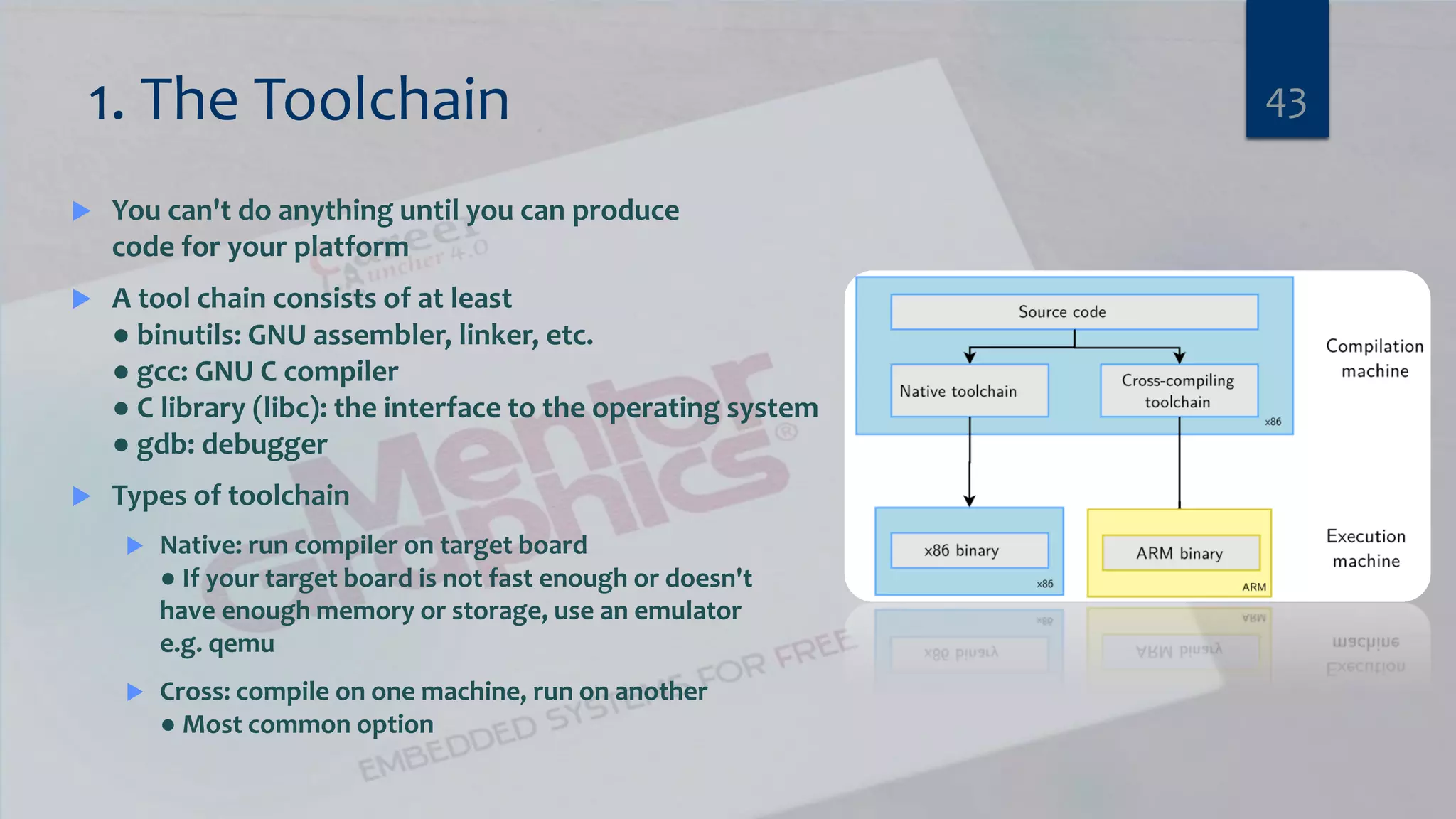
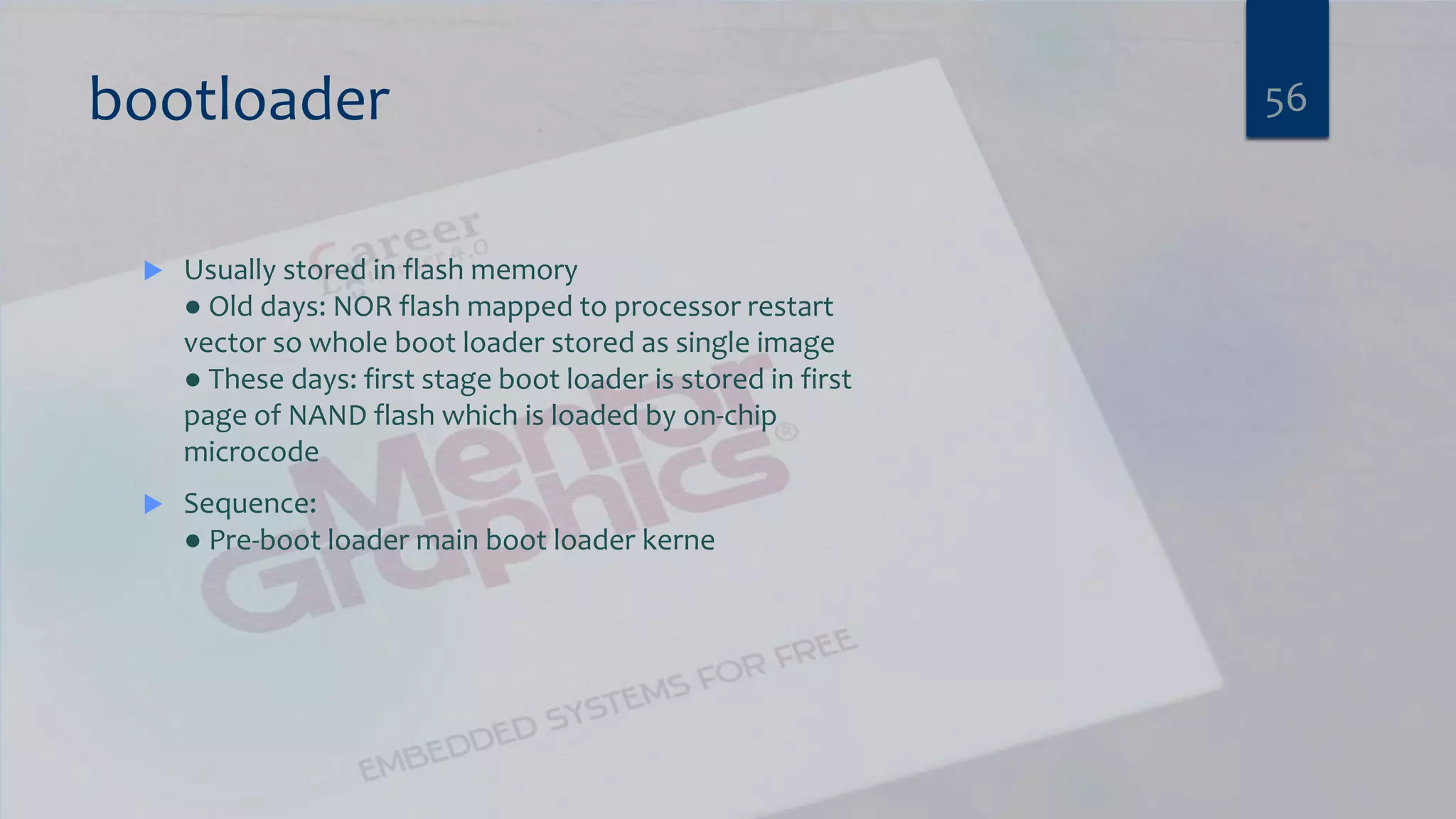
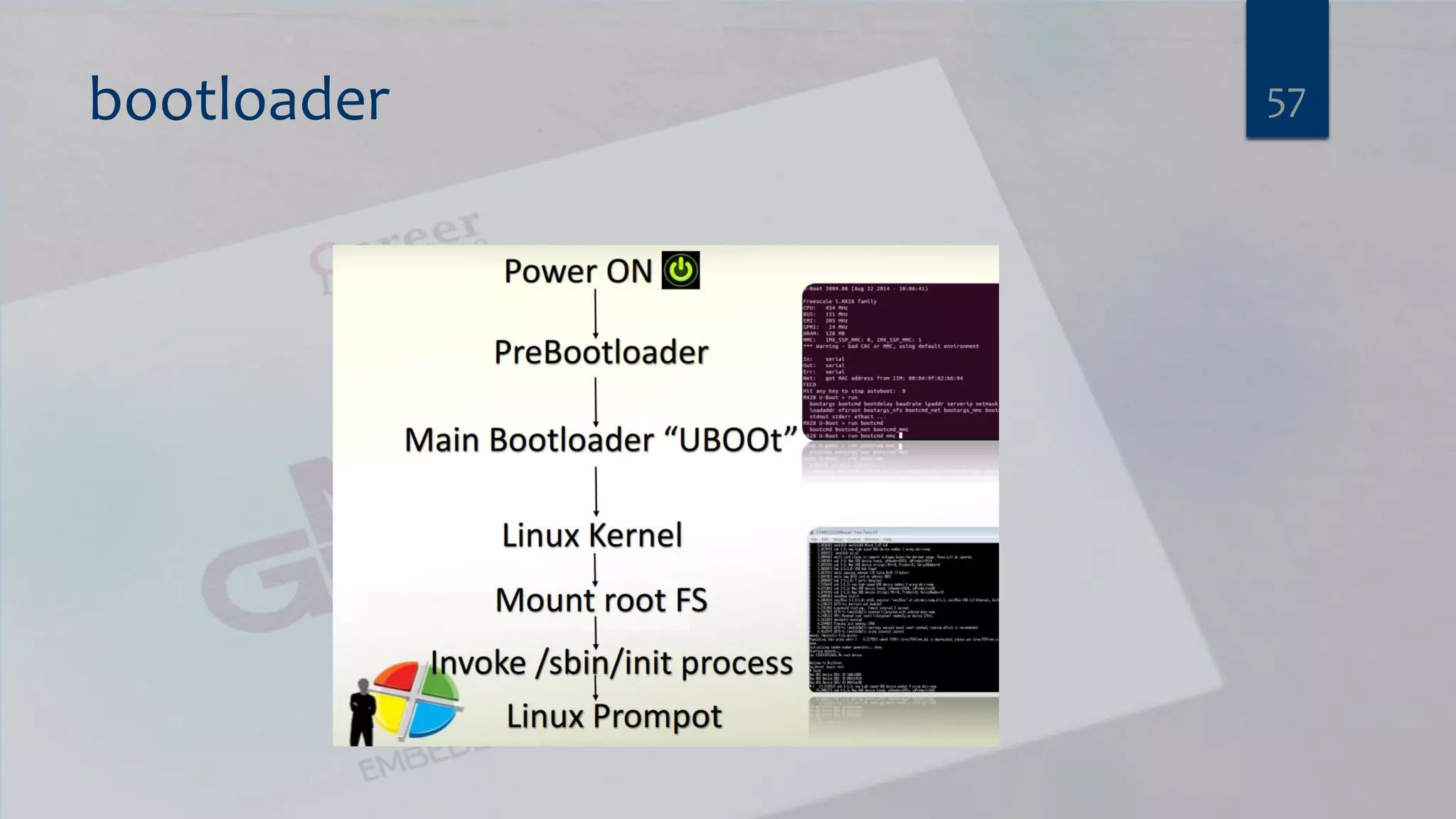
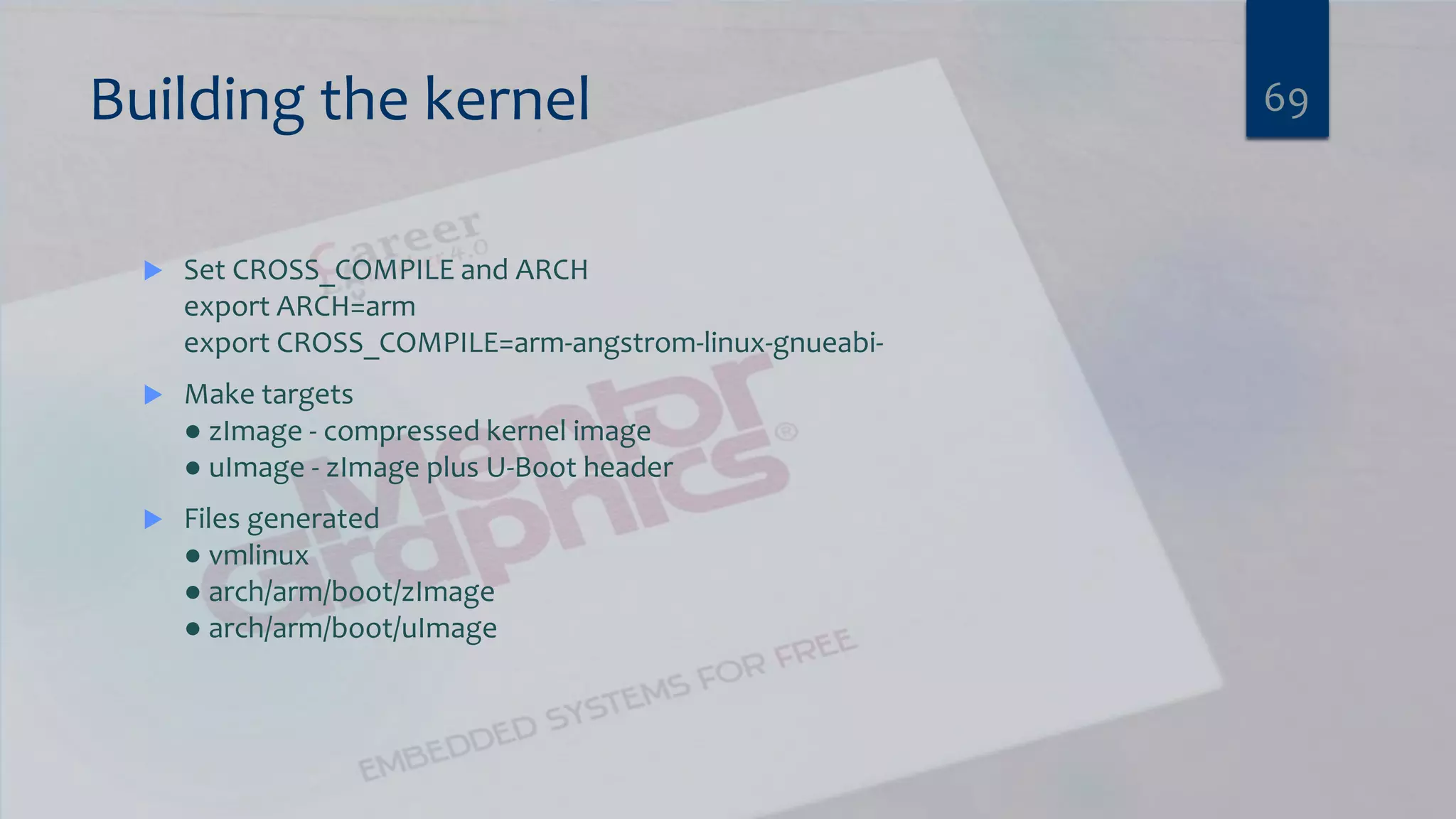
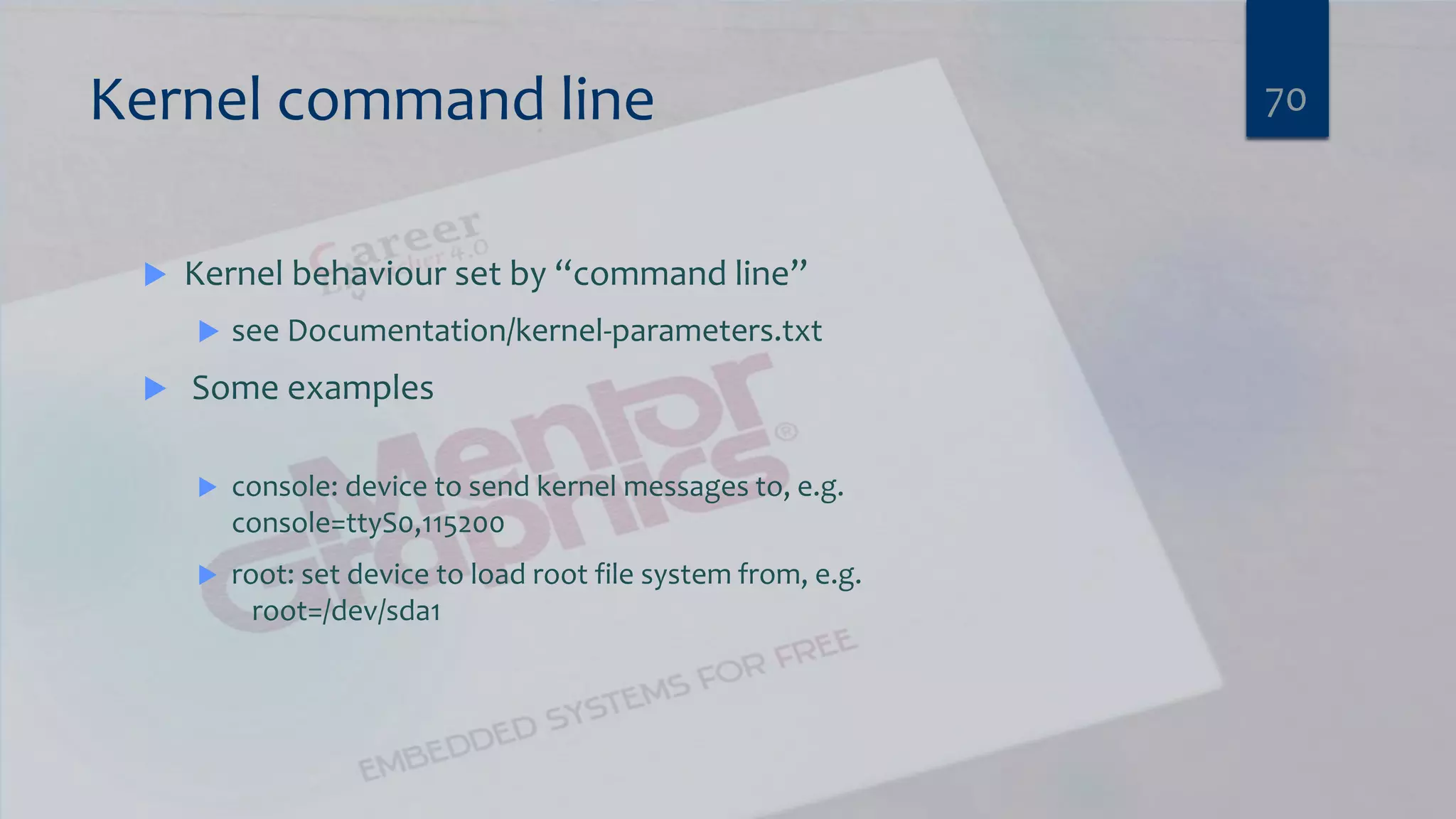
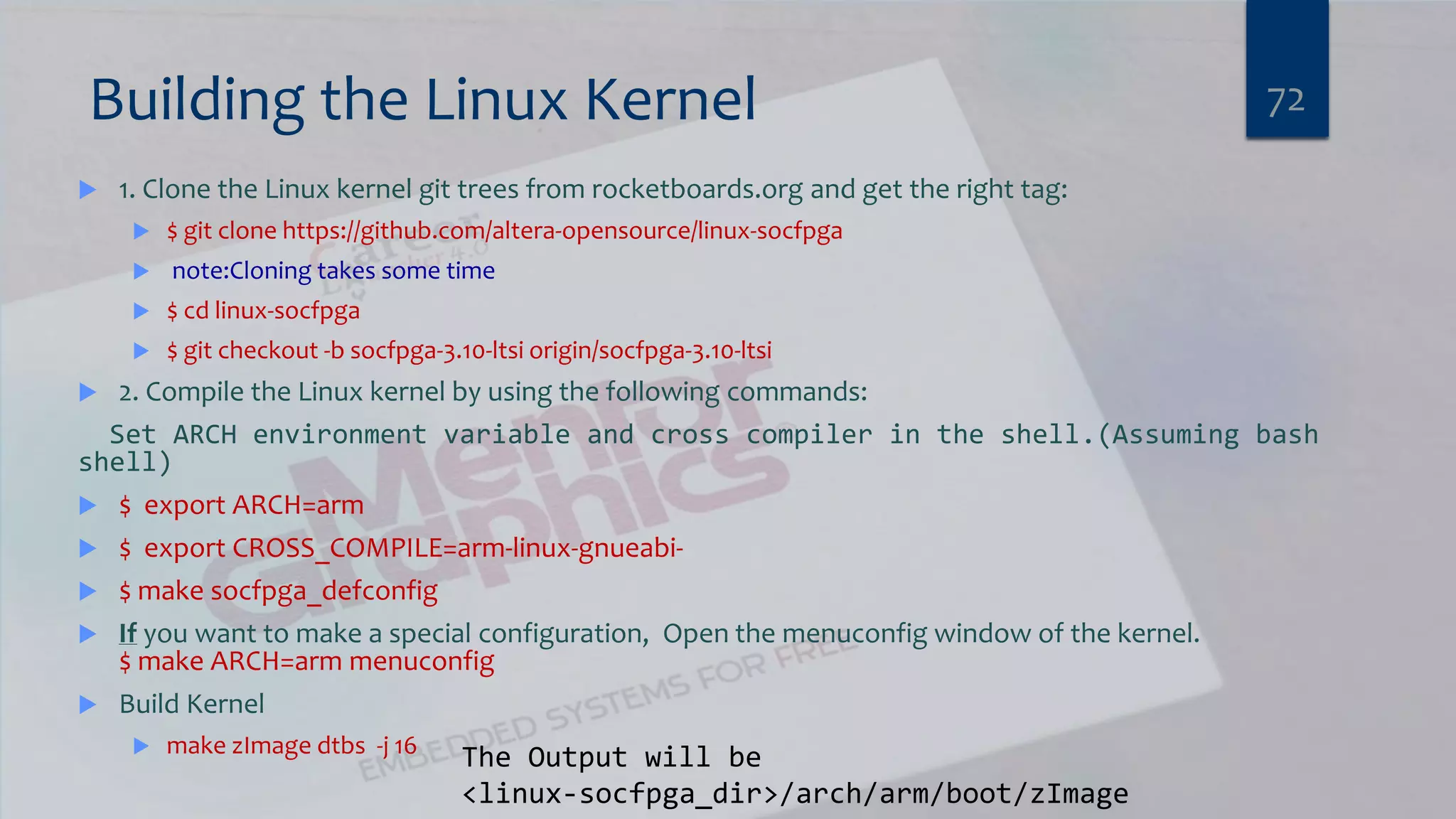
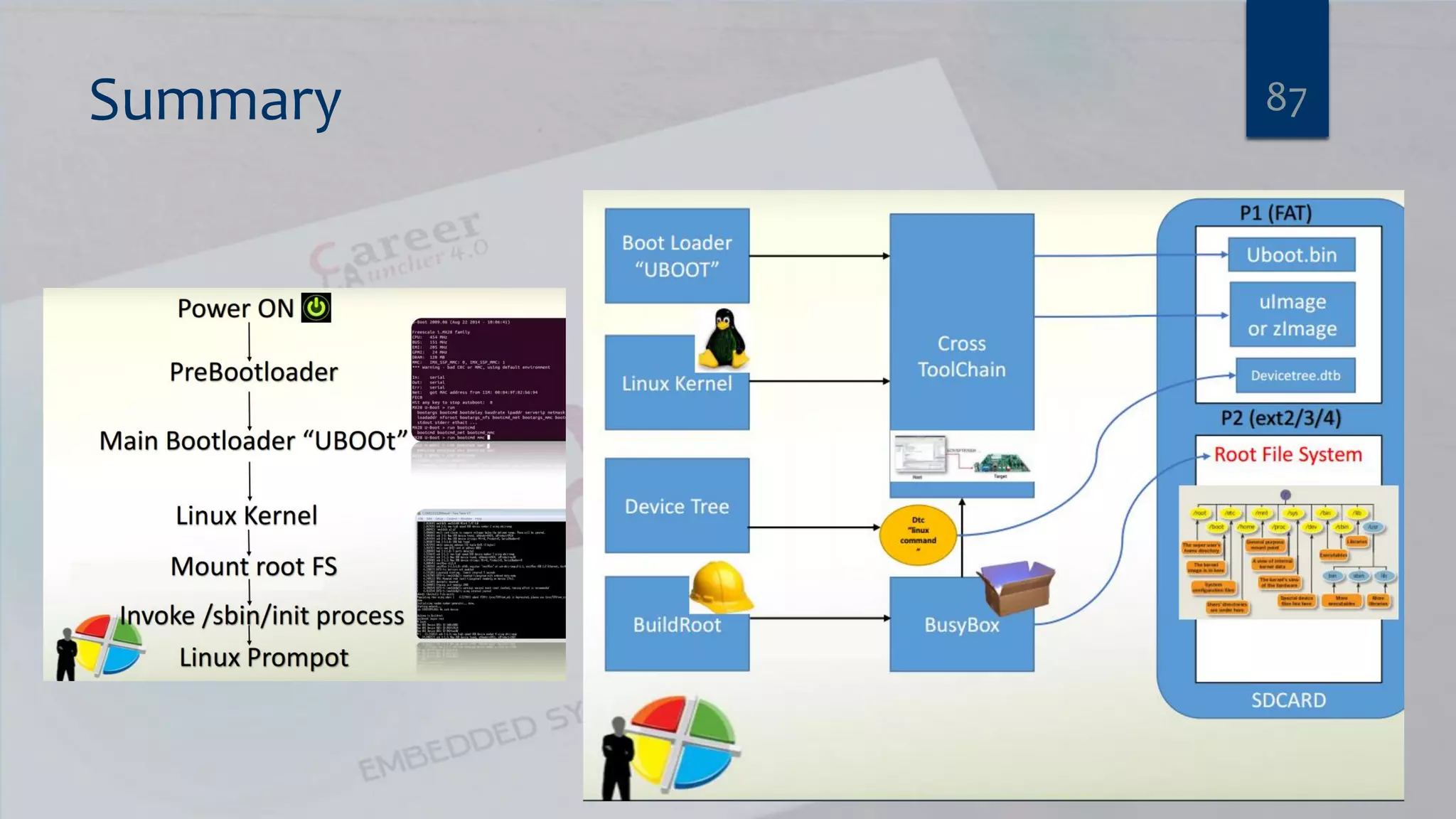
The document discusses embedded Linux and provides an agenda for an embedded Linux workshop. It begins with an introduction to embedded systems, communication engineer fields, and automotive systems. It then discusses embedded Linux, including toolchains, bootloaders, the Linux kernel, and embedded Linux development. Examples are provided for building U-Boot on the Raspberry Pi 2 and running a bare metal application on an Altera Arria10 virtual platform using a cross-compiler toolchain.


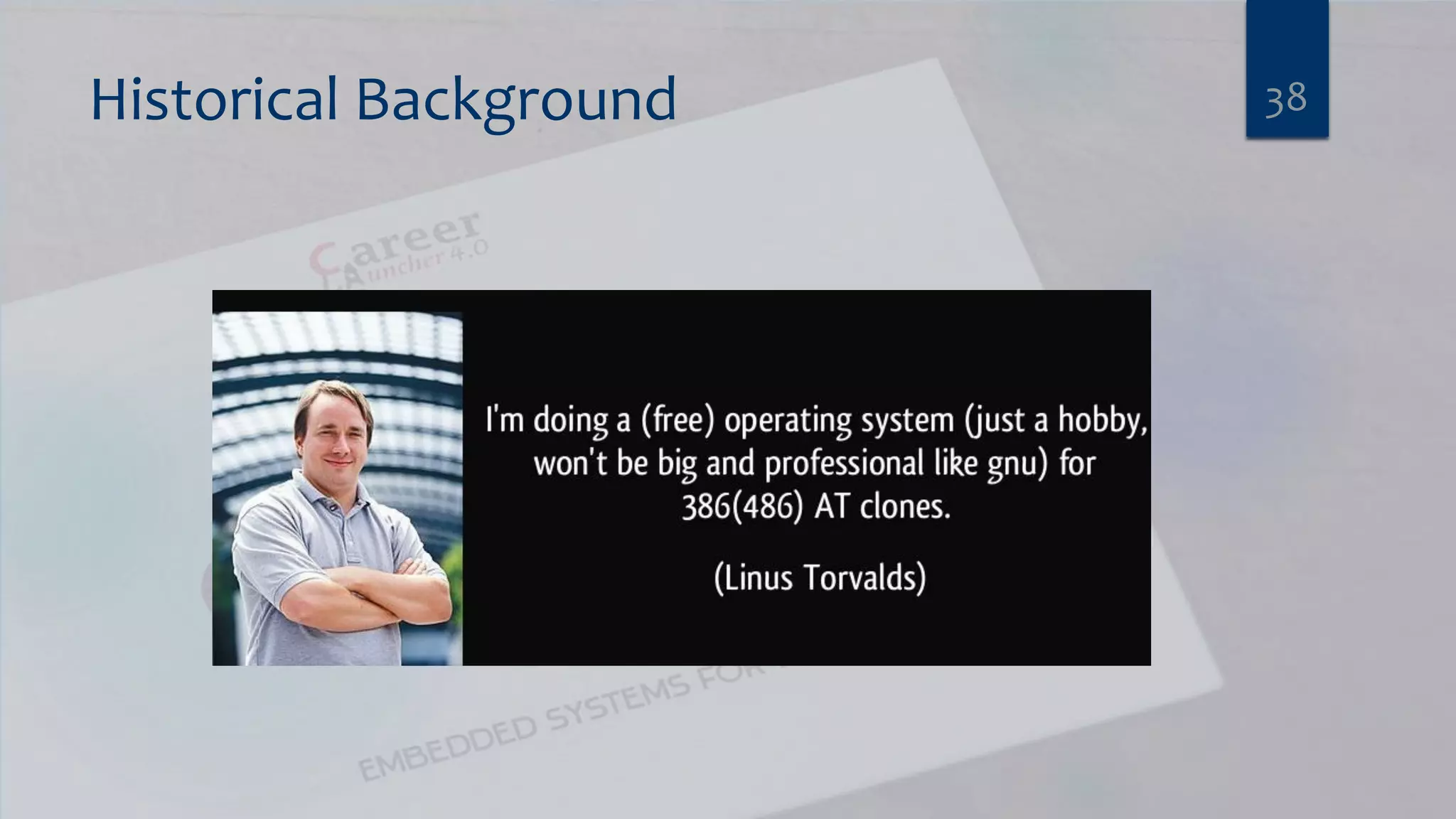
![Historical Background It started in bell Labs with terminated project for Multics Multi-user operating system Dennis Ritchie and Ken Thomson started to work on Unix 1969: first Implementation of Unix. 1972:Creation of “C” Programming Language to facilitate the porting. 1973: Complete rewrite of UNIX into “c” Richard Stallman is Believing in free Software, he formed the Free Software Foundation and Started the GNU [Gnu Not Unix] Project in 1983. 37](https://image.slidesharecdn.com/kvectorembeddedlinuxworkshop-170711132843/75/K-vector-embedded_linux_workshop-37-2048.jpg)
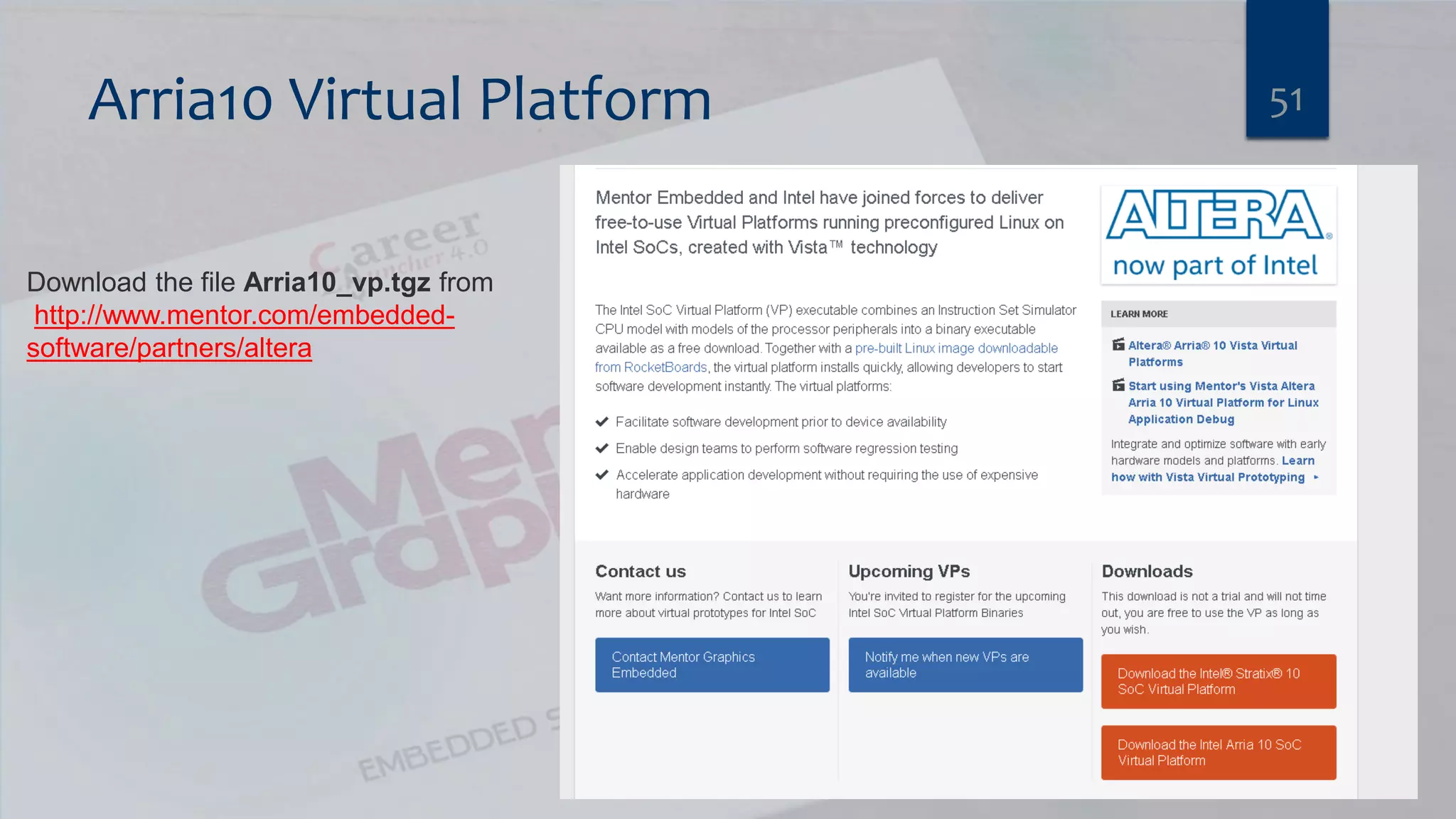

![References Installing Altera Arria 10 SoC Virtual Platform [rocketboards.org] Virtual Platform for Industry Leading SoC FPGAs [Intel® FPGAs] Mentor Embedded for Intel® Altera Documentation Altera Arria 10 SoC Board [rocketboards.org] Free Electrons Slides e-Linux, Getting Started, Single Board Computers 88](https://image.slidesharecdn.com/kvectorembeddedlinuxworkshop-170711132843/75/K-vector-embedded_linux_workshop-88-2048.jpg)