1. The document describes a fast unsupervised approach for image segmentation based on clustering algorithm fusion and level set methods. 2. It first extracts features from images using color transformation to CIE L*a*b* color space and non-linear diffusion. Then it applies multiple clustering algorithms including Fuzzy C-means, K-means, self-organizing maps, and Gaussian mixture models. 3. The results from the clustering algorithms are fused to generate a cluster map which is then used to evolve the level set contour for segmentation. Simulation results on texture images show the proposed method achieves better segmentation accuracy compared to traditional level set approaches.

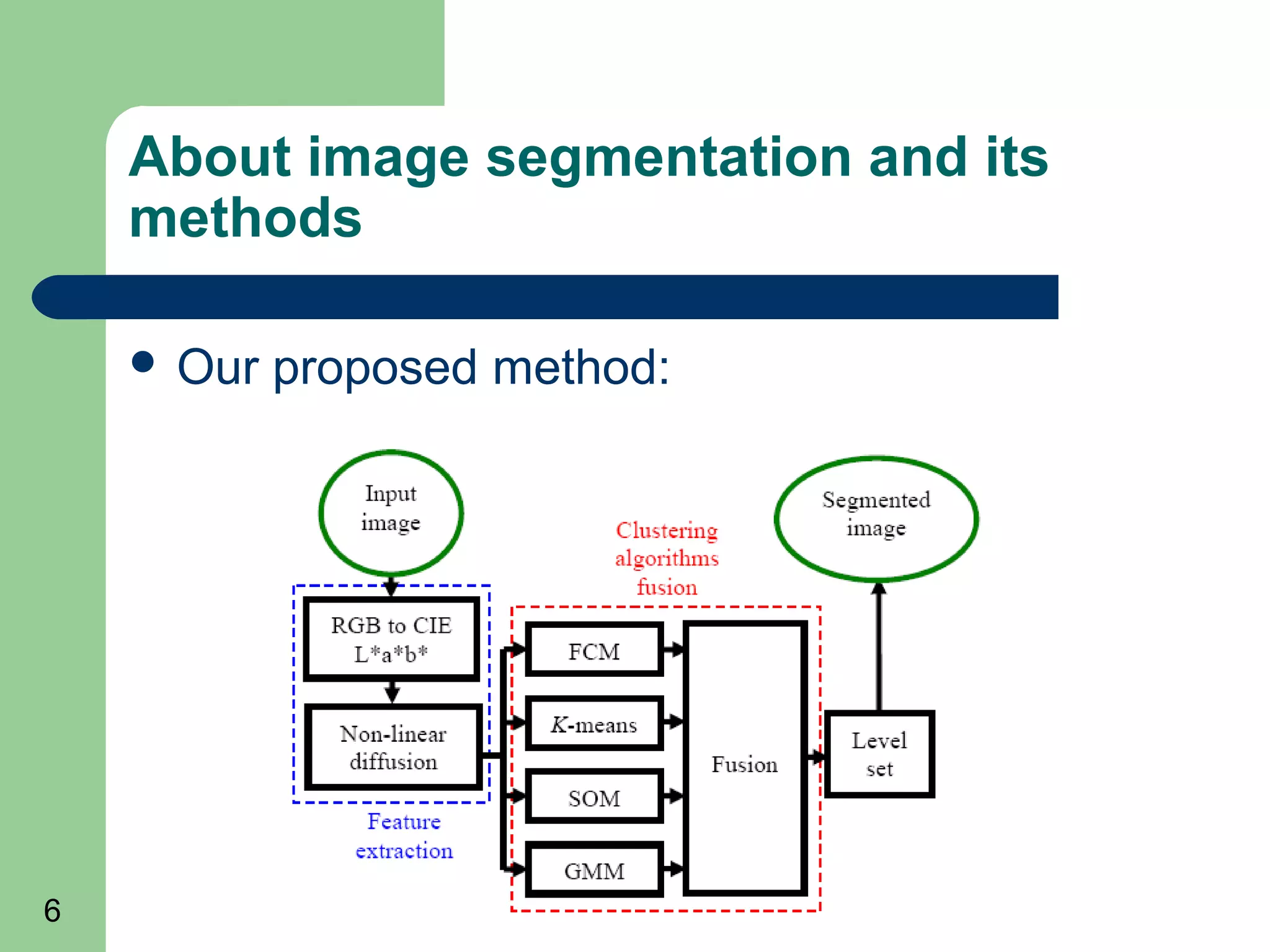


![21 Simulation results Comparison between our algorithm and traditional level set methods proposed in [1 and 2]](https://image.slidesharecdn.com/icsipatexture-170617190037/75/Locating-texture-boundaries-using-a-fast-unsupervised-approach-based-on-clustering-algorithms-fusion-and-level-set-21-2048.jpg)
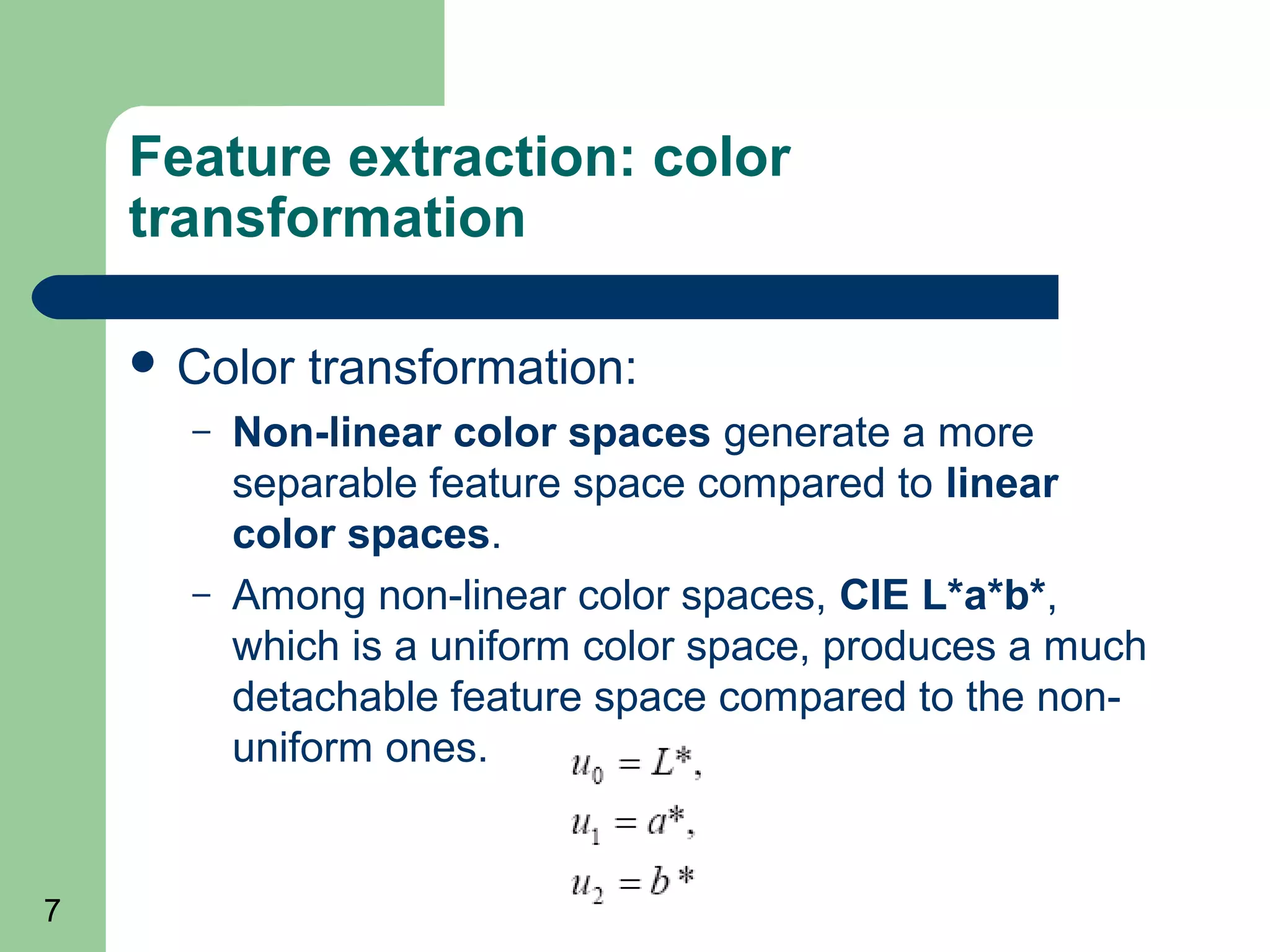
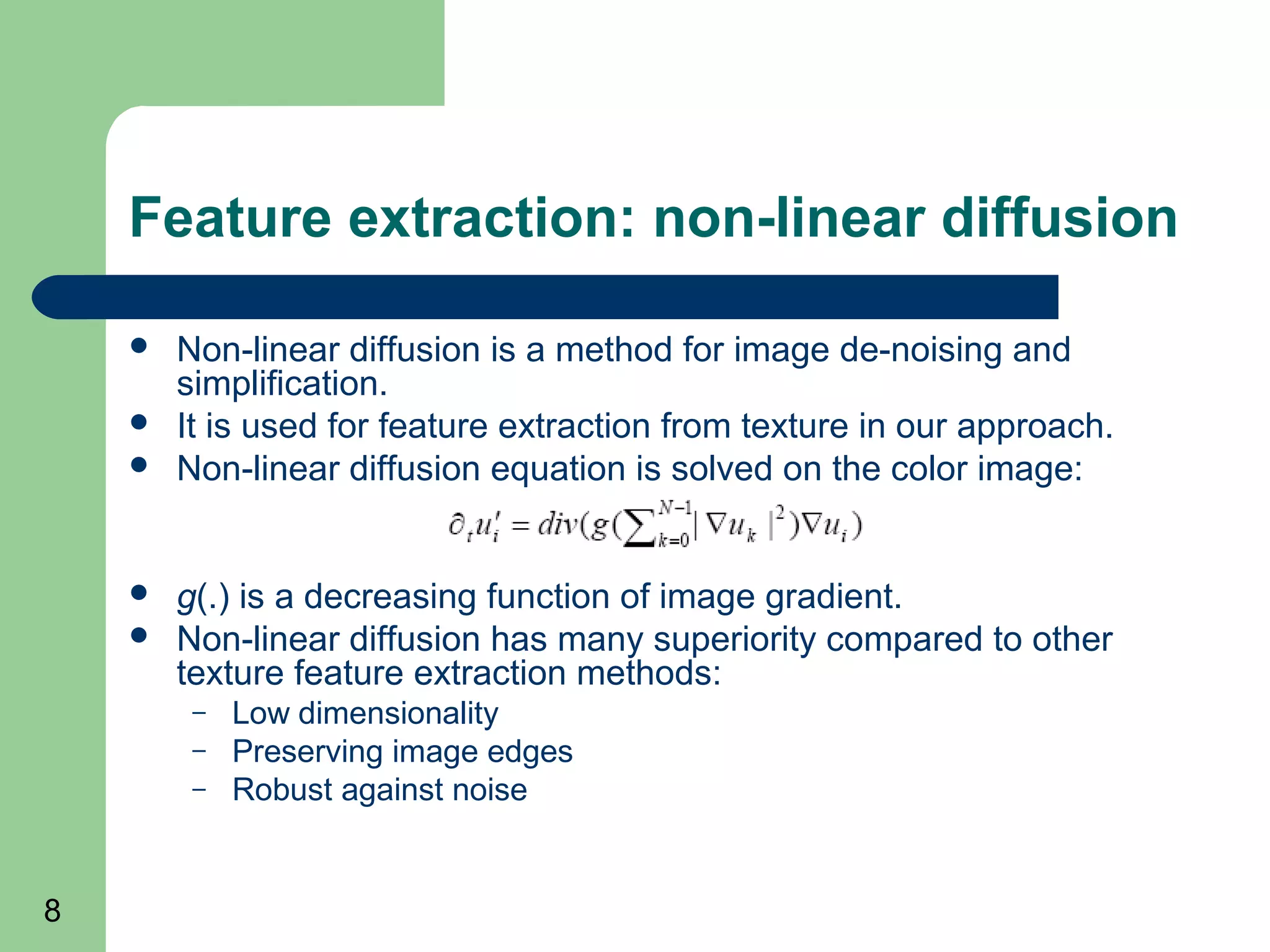
![27 Summary In this paper, a fast level set based method has been proposed for image segmentation. Our algorithm is robust against noise. The proposed feature space has much less dimensionality compared to Gabor and structure tensors. Unlike [1], image gradients have not been calculated, which decreases the effects of noise. Using fusion, significantly increases the generalization of the clustering algorithms.](https://image.slidesharecdn.com/icsipatexture-170617190037/75/Locating-texture-boundaries-using-a-fast-unsupervised-approach-based-on-clustering-algorithms-fusion-and-level-set-27-2048.jpg)
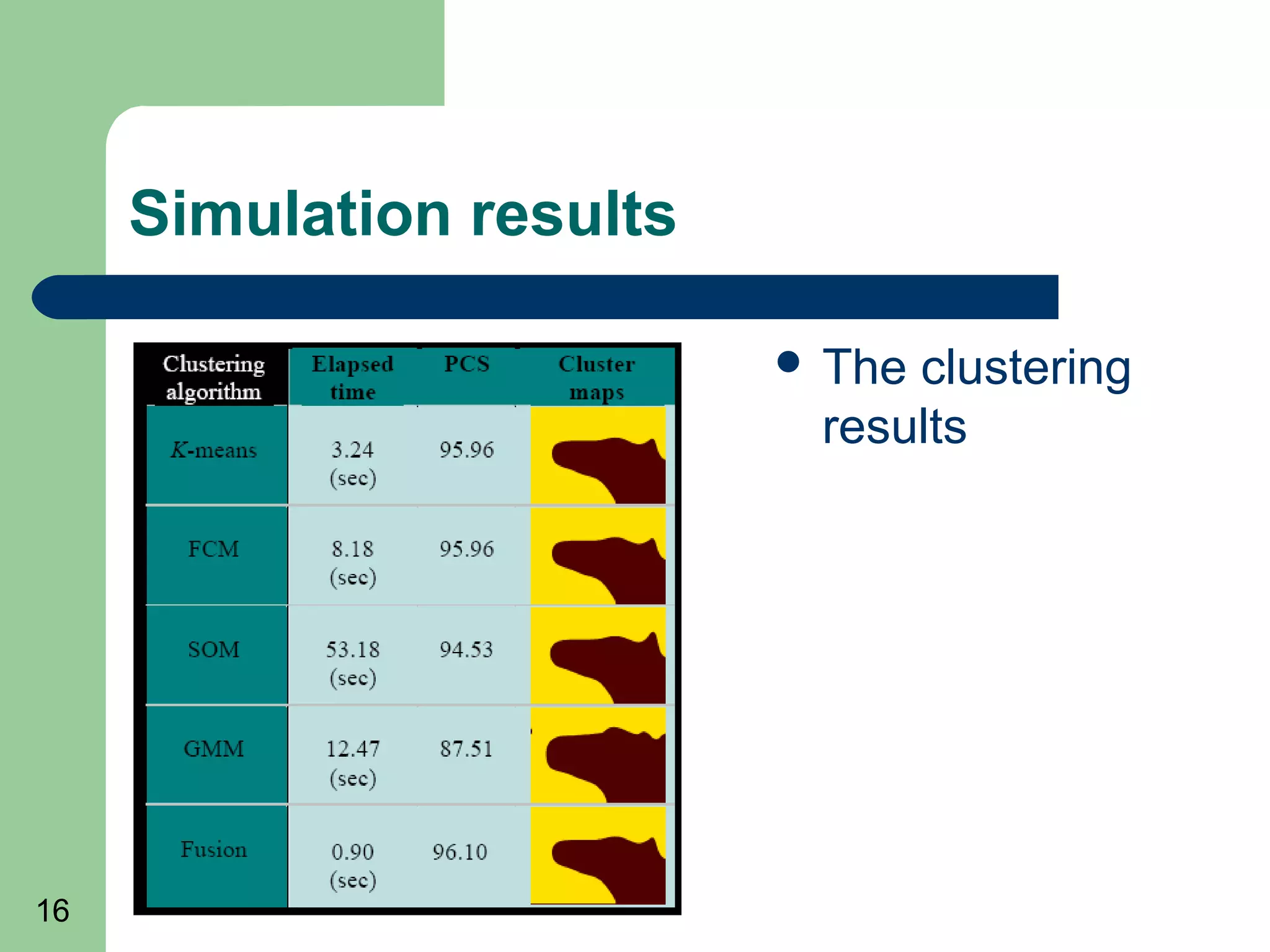
![28 References [1] S. Daniel Cremers, M. Rousson, and R. Deriche, "A Review of Statistical Approaches to level sets Segmentation: Integrating Colour, Texture, Motion and Shape", 2007, International Journal of Computer Vision 72(2), 195–215 [2] M. Rousson, T. Brox, and R. Deriche, "Active Unsupervised Texture Segmentation on a Diffusion Based Feature Space", 2003, Proceedings of the 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’03)](https://image.slidesharecdn.com/icsipatexture-170617190037/75/Locating-texture-boundaries-using-a-fast-unsupervised-approach-based-on-clustering-algorithms-fusion-and-level-set-28-2048.jpg)