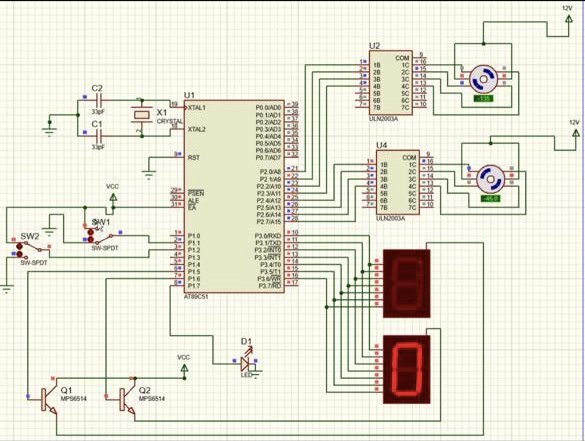
 I’m trying to implement an automated parking lot using an 8051. I’m using stepper motors to function as gates at the entrance and the exit of the parking lot that open whenever the IR sensors placed at the entrance/exit detects a vehicle passing by. I’m also keeping a count of the available slots in the lot using the sensors and I’m displaying it using two multiplexed seven segment displays. The code functions flawlessly within simulation tools like proteus but doesn’t work at all upon physical assembly. I have physically assembled the 7 segment part of the program (the sub routine called disp) which worked properly. I don’t understand why it stops functioning once I integrate the codes for the stepper motors and the IR Sensors. Here’s the code:
I’m trying to implement an automated parking lot using an 8051. I’m using stepper motors to function as gates at the entrance and the exit of the parking lot that open whenever the IR sensors placed at the entrance/exit detects a vehicle passing by. I’m also keeping a count of the available slots in the lot using the sensors and I’m displaying it using two multiplexed seven segment displays. The code functions flawlessly within simulation tools like proteus but doesn’t work at all upon physical assembly. I have physically assembled the 7 segment part of the program (the sub routine called disp) which worked properly. I don’t understand why it stops functioning once I integrate the codes for the stepper motors and the IR Sensors. Here’s the code:
org 0000h mov r6,#02h mov r1,#0fh mov r2,#0f0h mov dptr,#table ;from maincode: mov p2,#11H clr p1.7 setb c l1:jnb p1.1,ent l2:jnb p1.2,exit mov a,r6 acall disp jnc l2 sjmp l1 ent:mov a,r6 dec a mov r6,a mov p2,#12H l3:acall disp jnb p1.1,l3 mov p2,#11H mov a,r6 jz m5 sjmp l1 m5:clr c setb p1.7 sjmp l2 exit: clr p1.7 setb c mov a,r6 inc a mov r6,a mov p2,#21H l4:acall disp jnb p1.2,l4 mov p2,#11H sjmp l1 disp:mov a,r6 anl a,r1 movc a,@a+dptr mov p3,a setb p1.5 mov r5,#05h mov th0,#00h mov tl0,#00h dj1:acall delay1 djnz r5,dj1 clr p1.5 mov th0,#00h mov tl0,#00h mov r5,#05h dj4:acall delay1 djnz r5,dj4 mov a,r6 anl a,r2 swap a movc a,@a+dptr mov p3,a setb p1.6 mov r5,#05h mov th0,#00h mov tl0,#00h dj2:acall delay1 djnz r5,dj2 clr p1.6 mov th0,#00h mov tl0,#00h mov r5,#05h dj3:acall delay1 djnz r5,dj3 ret delay1:mov r7,#14h m8:SETB TR0 AGAIN:JNB TF0,AGAIN CLR TR0 CLR TF0 djnz r7,m8 RET table:db 0c0h,0f9h,0a4h end And here’s 7 segment display part of the program that i tested separately:
org 0000h mov r6,#02h mov r1,#0fh mov r2,#0f0h mov dptr,#table disp:mov a,r6 anl a,r1 movc a,@a+dptr mov p3,a setb p1.5 mov r5,#05h mov th0,#00h mov tl0,#00h dj1:acall delay1 djnz r5,dj1 clr p1.5 mov th0,#00h mov tl0,#00h acall delay1 mov a,r6 anl a,r2 swap a movc a,@a+dptr mov p3,a setb p1.6 mov r5,#05h mov th0,#00h mov tl0,#00h dj2:acall delay1 djnz r5,dj2 clr p1.6 mov th0,#00h mov tl0,#00h acall delay1 sjmp disp delay1:MOV R1,#00AH R:SETB TR0 AGAIN:JNB TF0,AGAIN CLR TR0 CLR TF0 DJNZ R1,R RET table:db 0c0h,0f9h,0a4h end