I have about 32 seconds worth of accelerometer data of a basic driving scenario 25MPH normal roads along with hitting about 7 potholes and a rough patch of road. The accelerometer is mounted on the dash board of my car with double sided tape.
Problem: I have all the data that is noisy from the accelerometer, and I need to make a simple way to detect that a pothole event has occurred. Below are several graphs of data in time domain and FFT. The accelerometer is measuring in GForce
Basically I want my arduino to know a pothole has occurred with fairly great accuracy and not using graduate level mathematics and techniques.
Accelerometer sampled at 100hz has a simple 50HZ RC LOW PASS FILTER ON THE Z AXIS
Here is the CSV data for the 32 seconds of accelerometer readings TIME, GFORCE format: http://hamiltoncomputer.us/50HZLPFDATA.CSV
UPDATE: This is the RAW full bandwidth of accelerometer 1000HZ sampled at highest sampling rate I could get on Arduino. Direct CSV file download: About 112 Seconds of data
http://hamiltoncomputer.us/RAWUNFILTEREDFULLBANDWIDTH500HZ.csv
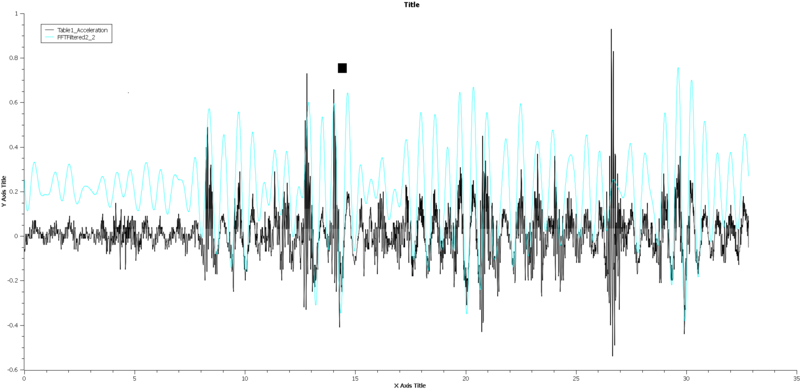
Black trace is RAW unfiltered Accelerometer data: Blue trace is filtered by a bandstop filter based on the extreme frequencies found in FFT, Dominate 2HZ and 12HZ.
Pothole event looks like this in time domain: 
not sure what the 10 to 15HZ component is in the FFT, is that the actual pothole, or is it the wheel hop of the wheels against the road, or is it the resonant frequency of the car?
FFT:

seems like it is the actual pothole events, here is a HPF @ 13HZ The dominant features of the potholes seem enhanced

I want to be able to detect and count the potholes in real time
It seems to be counter-intuitive the suspension should move a lot slower than a 10 to 13 HZ that would cause motion-sickness I believe
UPDATE:
As per AngryEE's suggestions, I used the full bandwidth of the accelerometer 1000HZ and the maximum sampling rate I could get on the arduino.
FFT:

here is a sample piece of data of the pothole event and some bumps and road noise around it:

Added the Diode envelope detector circuit, output looks the same... The accelerometer always output 0 to 3.3Volts not negative... 
UPDATE:
From many road tests, I never exceeded 1.6G's up to 45 MPH in my car on the Z axis, I used rand() to generate pseudorandom Gforce acceleration.
My idea is if I can look at 1 to 3 second windows of data, I can calculate displacement of the Z axis, but I was worried about the accelerometer drift, and errors in the integration. I don't need to be even 90% accurate here, >70% would be nice, but if I'm looking at displacement at one to three seconds at a time would that be possible to do in real time? This way I can see if the displacement is greater than like 1 inch, 2 inches, 5 inches. The bigger the displacement the rougher the bump or pothole was:
Can you check if I'm doing this right, I basically set up on my desktop, using rand() to generate random acceleration from -1.6 to 1.6 G's, capturing 3 seconds of data @ a simulated 50HZ sampling rate
If like you run *nix, I'm using Sleep() from Windows.h to make the 20mS delay, 50HZ sampling rate
I just wanted to see if the code looks right to you, I didn't do the cicular buffer yet, I'm kinda confused on how to implement it: the commented out code, is from the class I'm working on for it, but I don't understand it 100% yet. A circular buffer would allow to contiguously move windows of data right?
#include <cstdlib> #include <iostream> #include <iomanip> #include <ctime> // USED BY RAND #include <windows.h> // Used for delay using namespace std; #define SAMPLE_RATE 0.020 // Sample rate in Milliseconds #define GRAVITYFT_SEC 32 // Gravity velocity 32 feet/sec #define INCH_FOOT 12 // 12 inches in foot, from velocity to inch displacement calculation int main(int argc, char *argv[]) { srand((unsigned)time(0)); // SEED RAND() for simulation of Geforce Readings // SIMULATING ACCELERATION READINGS INTO A CIRCULAR BUFFER // circular_buffer Acceleration; // Create a new Circular buffer for Acceleration // cb_init(&Acceleration, 150, 4); // Sampling @ 50HZ, 3 seconds of data = 150, size is float data of 4 bytes //Simulate a sample run of Acceleration data using Rand() // WE WILL BE SIMULATING "RANDOM" GEFORCE RATINGS using the rand() function constraining to -1.6 to 1.6 GFORCE // These ratings are consistent with our road tests of apparently random vibration and Geforce readings not exceeding about 1.6 G's float Gforce[150]; // Random Geforce for 3 second window of data float velocity[150]; // Hold velocity information float displacement[150]; // Hold Displacement information float LO = -1.6; // Low GForce limit recorded from 6 road tests at different speeds float HI = 1.6; // High GForce limit recorded from 6 road tests at different speeds for(int i = 0; i < 150; i++) // 3 Second iwndow of random acceleration data { Gforce[i] = LO + (float)rand()/((float)RAND_MAX/(HI-LO)); // Borrowed from Stackexchange : http://stackoverflow.com/questions/686353/c-random-float if( i == 0) // Initial values @ first Acceleration { velocity[i] = Gforce[i] * SAMPLE_RATE * GRAVITYFT_SEC; // Initial velocity displacement[i] = velocity[i] * SAMPLE_RATE * INCH_FOOT; // Initial Displacement } else { velocity[i] = velocity[i-1] + (Gforce[i] * SAMPLE_RATE * GRAVITYFT_SEC); // Calculate running velocity into buffer displacement[i] = displacement[i-1] +(velocity[i] * SAMPLE_RATE * INCH_FOOT); // Calculate running displacement into buffer } //cout << endl << Gforce[i]; // Debugging //cb_push_back(&Acceleration, &Gforce[i]); // Push the GeForce into the circular buffer Sleep(SAMPLE_RATE*1000); // 20mS delay simulates 50HZ sampling rate Sleep() expects number in mS already so * 1000 } // PRINT RESULTS for (int j = 0; j < 150; j++) { cout << setprecision (3) << Gforce[j] << "\t\t" << velocity[j] << "\t\t" << displacement[j] << endl; } // READ THE BUFFER //cb_free(&Acceleration); // Pervent Memory leaks system("PAUSE"); return EXIT_SUCCESS; } Sample run:
GFORCE FT/SEC Inch Displacement Z axis -0.882 -0.565 -0.136 0.199 -0.437 -0.24 -1.32 -1.29 -0.549 0.928 -0.691 -0.715 0.6 -0.307 -0.788 1.47 0.635 -0.636 0.849 1.18 -0.353 -0.247 1.02 -0.108 1.29 1.85 0.335 0.298 2.04 0.824 -1.04 1.37 1.15 1.1 2.08 1.65 1.52 3.05 2.38 0.078 3.1 3.12 -0.0125 3.09 3.87 1.24 3.88 4.8 0.845 4.42 5.86 0.25 4.58 6.96 0.0463 4.61 8.06 1.37 5.49 9.38 -0.15 5.39 10.7 0.947 6 12.1 1.18 6.75 13.7 -0.791 6.25 15.2 -1.43 5.33 16.5 -1.58 4.32 17.5 1.52 5.29 18.8 -0.208 5.16 20.1 1.36 6.03 21.5 -0.294 5.84 22.9 1.22 6.62 24.5 1.14 7.35 26.3 1.01 8 28.2 0.284 8.18 30.1 1.18 8.93 32.3 -1.43 8.02 34.2 -0.167 7.91 36.1 1.14 8.64 38.2 -1.4 7.74 40 -1.49 6.79 41.7 -0.926 6.2 43.2 -0.575 5.83 44.6 0.978 6.46 46.1 -0.909 5.87 47.5 1.46 6.81 49.2 0.353 7.04 50.8 -1.12 6.32 52.4 -1.12 5.6 53.7 -0.141 5.51 55 0.463 5.8 56.4 -1.1 5.1 57.6 0.591 5.48 59 0.0912 5.54 60.3 -0.47 5.23 61.5 -0.437 4.96 62.7 0.734 5.42 64 -0.343 5.21 65.3 0.836 5.74 66.7 -1.11 5.03 67.9 -0.771 4.54 69 -0.783 4.04 69.9 -0.501 3.72 70.8 -0.569 3.35 71.6 0.765 3.84 72.5 0.568 4.21 73.5 -1.45 3.28 74.3 0.391 3.53 75.2 0.339 3.75 76.1 0.797 4.26 77.1 1.3 5.09 78.3 0.237 5.24 79.6 1.52 6.21 81.1 0.314 6.41 82.6 0.369 6.65 84.2 -0.598 6.26 85.7 -0.905 5.68 87.1 -0.732 5.22 88.3 -1.47 4.27 89.4 0.828 4.8 90.5 0.261 4.97 91.7 0.0473 5 92.9 1.53 5.98 94.3 1.24 6.77 96 -0.0228 6.76 97.6 -0.0453 6.73 99.2 -1.07 6.04 101 -0.345 5.82 102 0.652 6.24 104 1.37 7.12 105 1.15 7.85 107 0.0238 7.87 109 1.43 8.79 111 1.08 9.48 113 1.53 10.5 116 -0.709 10 118 -0.811 9.48 121 -1.06 8.8 123 -1.22 8.02 125 -1.4 7.13 126 0.129 7.21 128 0.199 7.34 130 -0.182 7.22 132 0.135 7.31 133 0.885 7.87 135 0.678 8.31 137 0.922 8.9 139 -1.54 7.91 141 -1.16 7.16 143 -0.632 6.76 145 1.3 7.59 146 -0.67 7.16 148 0.124 7.24 150 -1.19 6.48 151 -0.728 6.01 153 1.22 6.79 154 -1.33 5.94 156 -0.402 5.69 157 -0.532 5.35 159 1.27 6.16 160 0.323 6.37 162 0.428 6.64 163 0.414 6.91 165 -0.614 6.51 166 1.37 7.39 168 0.449 7.68 170 0.55 8.03 172 1.33 8.88 174 -1.2 8.11 176 -0.641 7.7 178 -1.59 6.69 179 1.02 7.34 181 -0.86 6.79 183 -1.55 5.79 184 -0.515 5.46 186 0.352 5.69 187 0.824 6.22 188 1.14 6.94 190 -1.03 6.29 192 -1.13 5.56 193 0.139 5.65 194 0.293 5.84 196 1.08 6.53 197 -1.23 5.75 199 -1.1 5.04 200 -1.17 4.29 201 -0.8 3.78 202 -0.905 3.2 203 -0.0769 3.15 203 -0.323 2.95 204 -0.0186 2.93 205 Press any key to continue . . . 





