First of all, in the case of axis-aligned rectangles, Kevin Reid's answer is the best and the algorithm is the fastest.
Second, for simple shapes, use relative velocities (as seen below) and the separating axis theorem for collision detection. It will tell you whether a collision happens in the case of linear motion (no rotation). And if there's rotation, you need a small timestep for it to be precise. Now, to a more general answer the question:
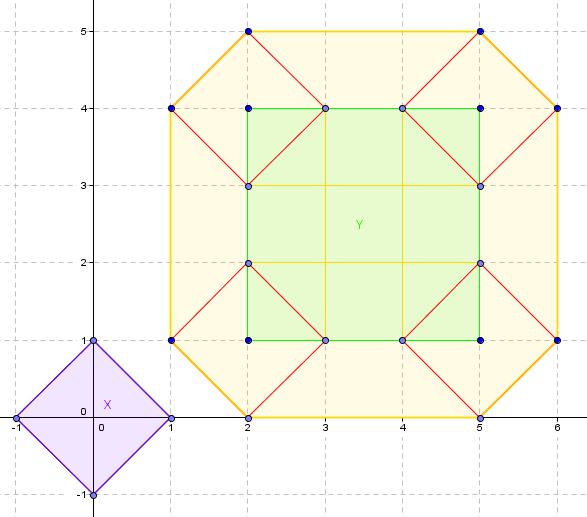
YouA collision can occur only have to even do all this if it is possible that the bounding circle of A meet that of B. We see here that it won't, and the way to tell the computer that is to compute the distance from CB to I as in the following picture and make sure it's bigger than the sum of the radii of A and B. If it's bigger, no collision. If it's smaller, then collision.
This doesn't work very well with shapes that are rather long, but in the case of squares or other such shapes, it's a very good heuristic to rule out collision.
To apply this idea more generally and be able to dealThis doesn't work very well with all kinds of shapes and not just those that fit their bounding circleare rather long, the radii method doesn't work. You must find the vertexbut in A that is farthest from the (CA, C'A) line on B's sidecase of it (i.e. which maximizes a dot product, let's call the maximum distance dA), find the vertex in B that is the furthest towards that line (by maximizing a dot product againsquares or other such shapes, let's call the maximum distance dB)it's a make sure thatvery good heuristic dA + dB < ICBto rule out collision.
That's the equivalent ofThe separating axis theorem applied to B and the swept volume ofswept by A with an axis, meaning they won't collidehowever, but that's much more computationally intensive thandoes tell you whether the radii method (linear time against a smallcollision happens. The complexity of the associated algorithm is linear with the sum of the numbers of vertices of each convex shape, constantbut it is less magical when comes the time) to actually handle the collision.
Our new, better algorithm that uses intersections to detect collisions, but still not as good as the separating axis theorem for telling whether a collision happens##
boolean mayCollide(Body A, Body B) { Vector2D relativeVelocity = A.velocity - B.velocity; if (separatingAxisradiiHeuristic(A, B, relativeVelocity)) { return false; // there is a separating axis between them } Volume sweptA = sweptVolume(A, relativeVelocity); return contains(convexHull(minkowskiMinus(sweptA, B)), Vector2D(0,0)); } boolean separatingAxisradiiHeuristic(A, B, relativeVelocity)) { // whateverthe methodcode youhere } Volume preferconvexHull(SetOfVertices s) { // the code here } boolean contains(Volume v, seeVector2D googlep) for{ // the code here } SetOfVertices minkowskiMinus(Body X, Body Y) { SetOfVertices result = new SetOfVertices(); for (Vertice x in X) { for (Vertice y in Y) { result.addVertice(x-y); } } return result; }