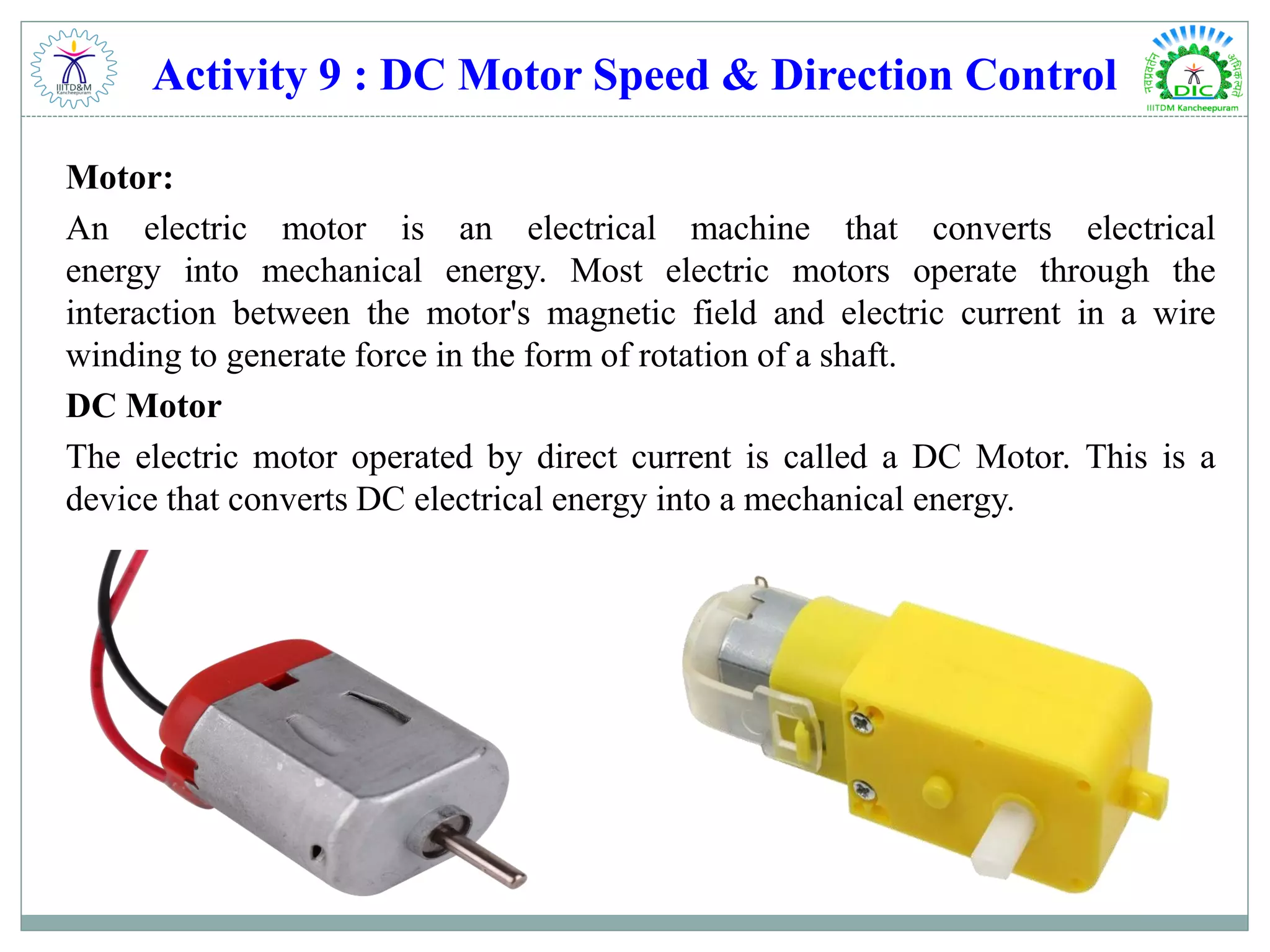
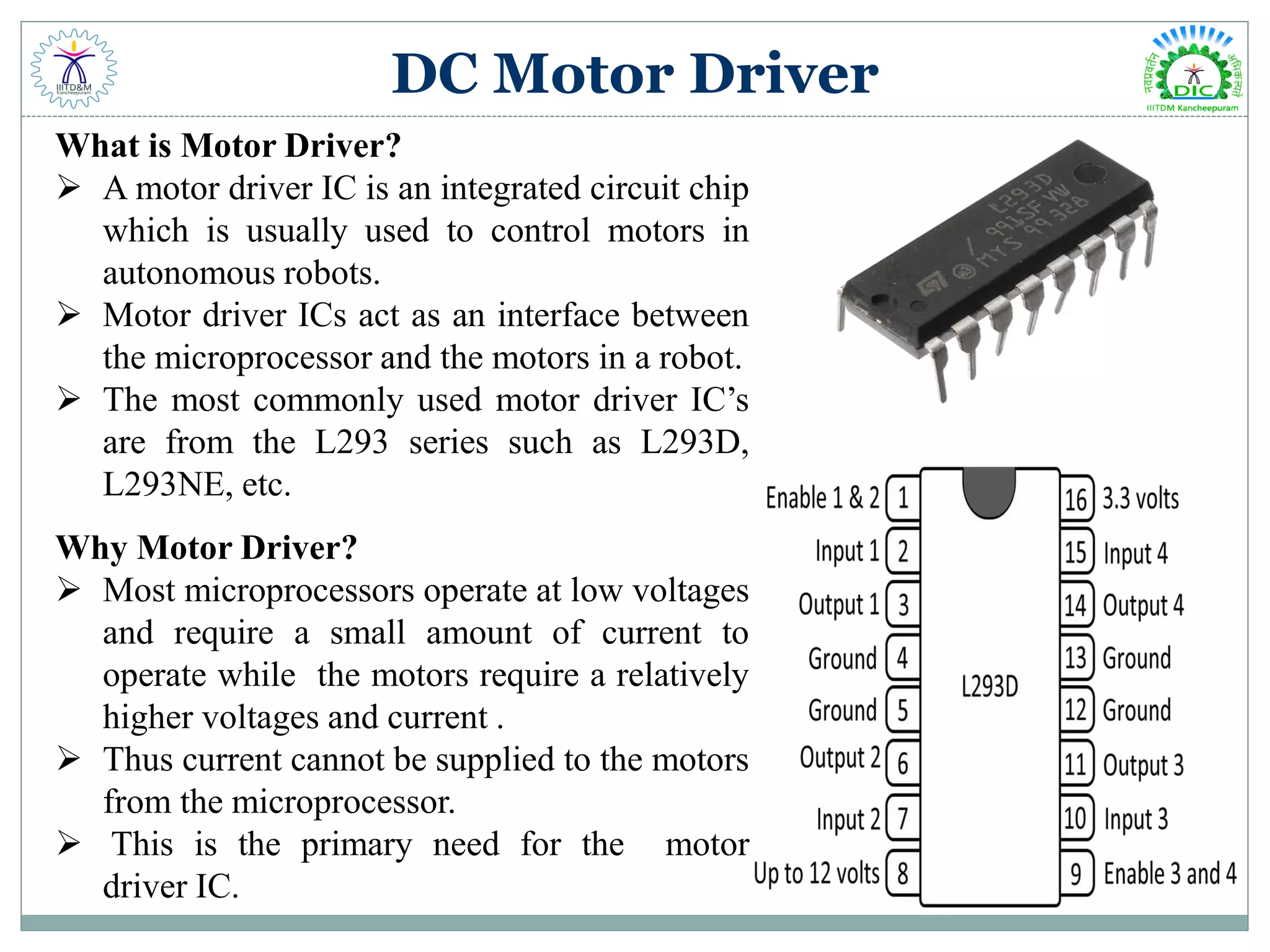
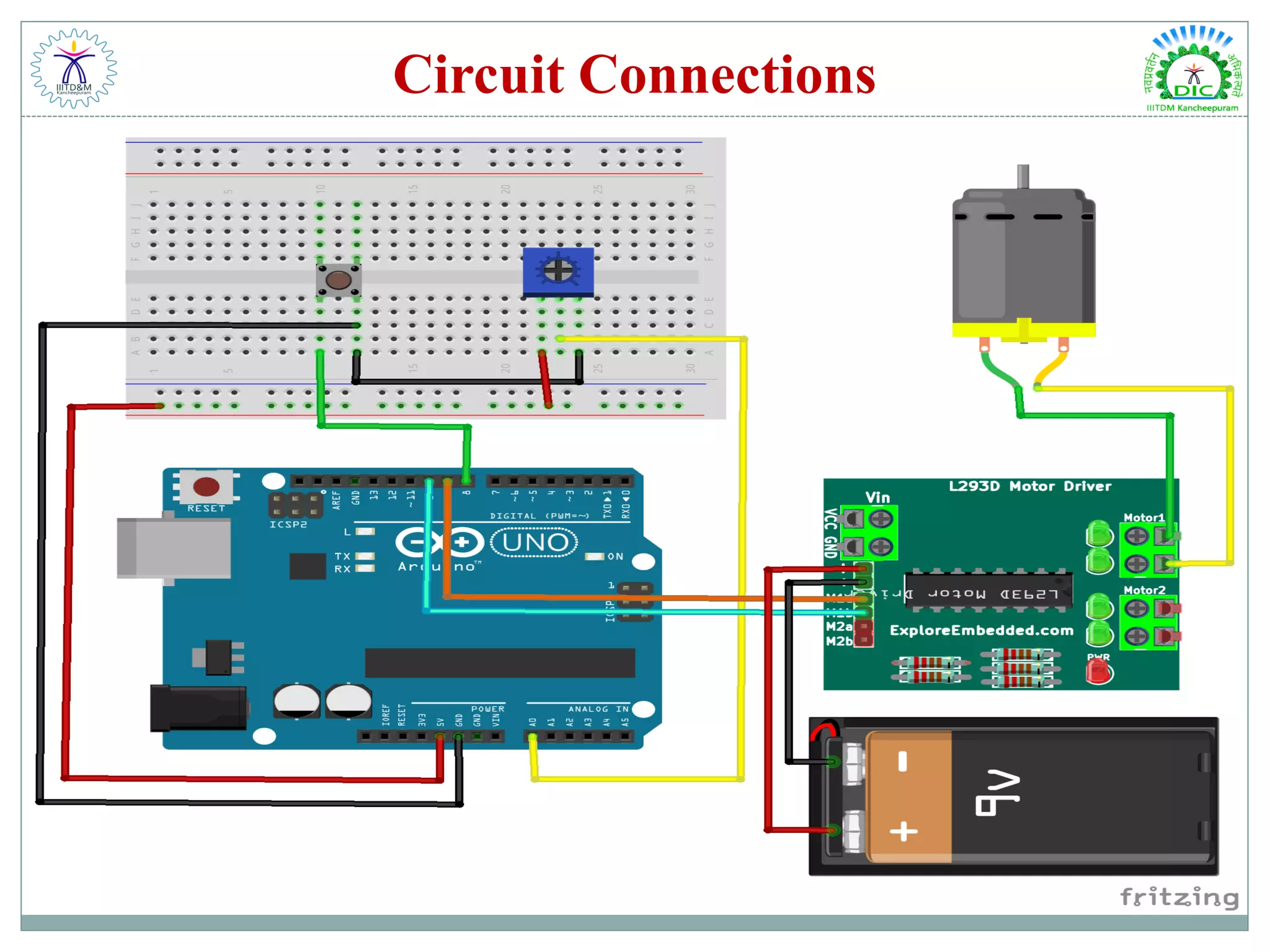
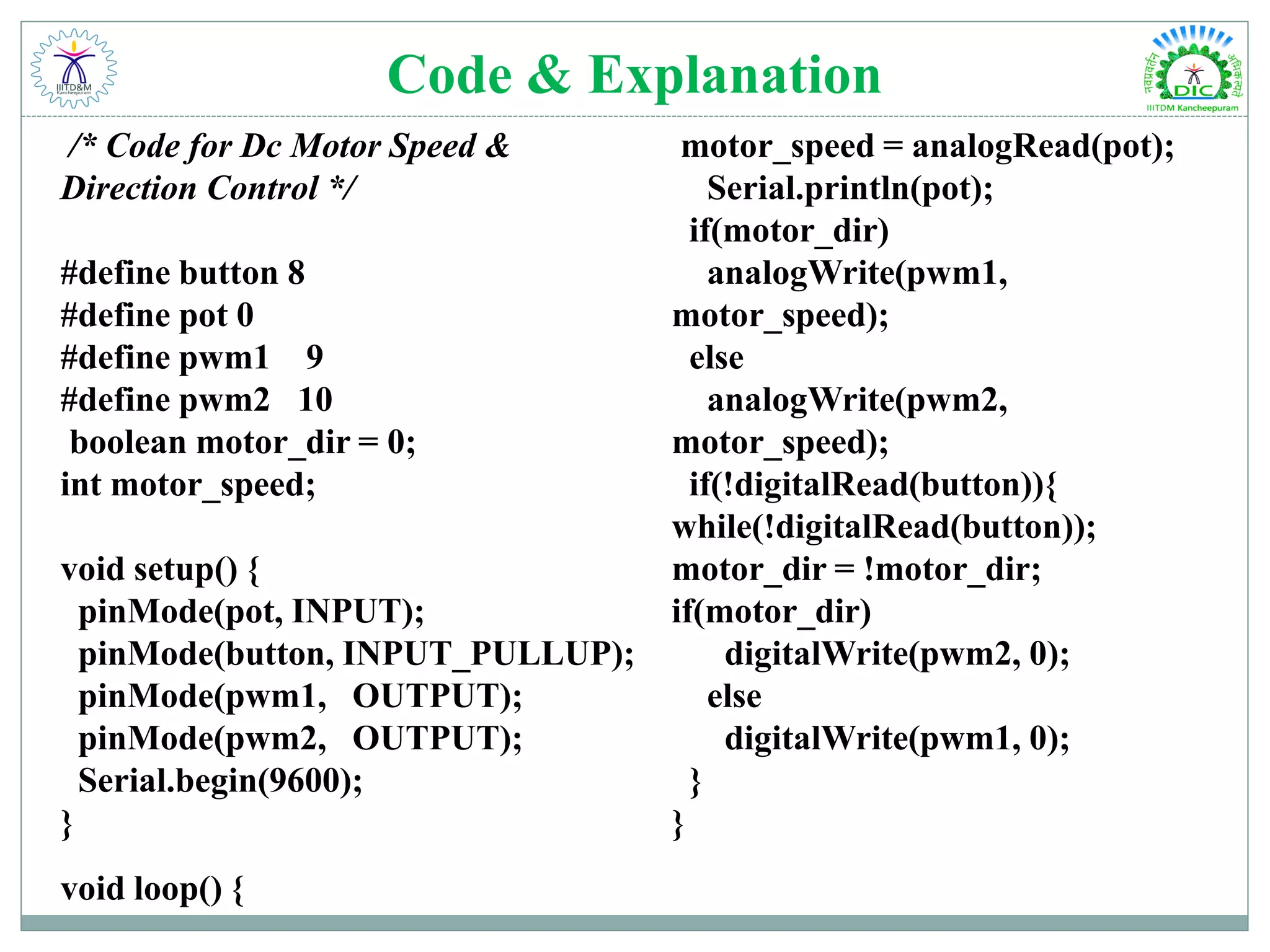
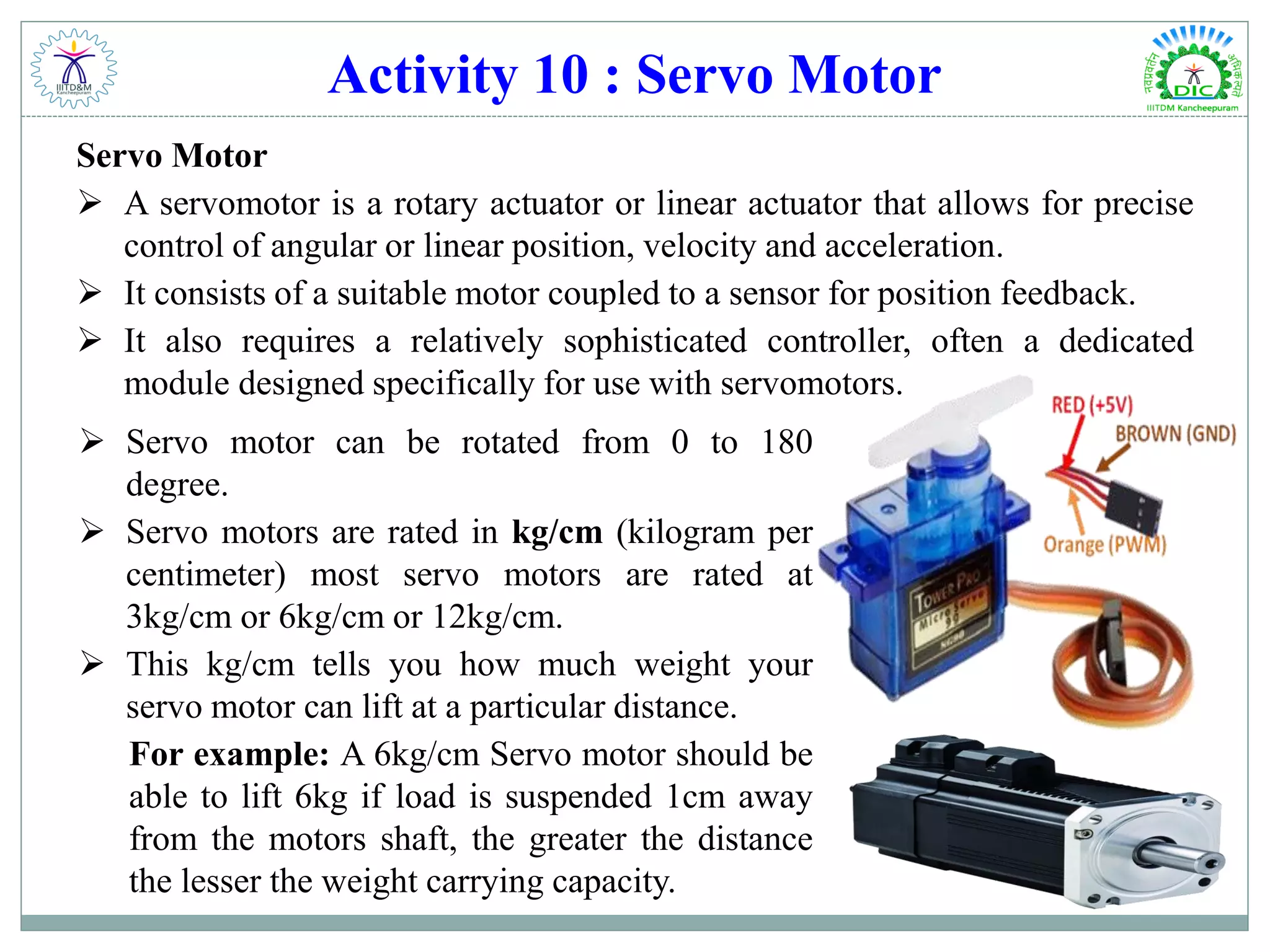
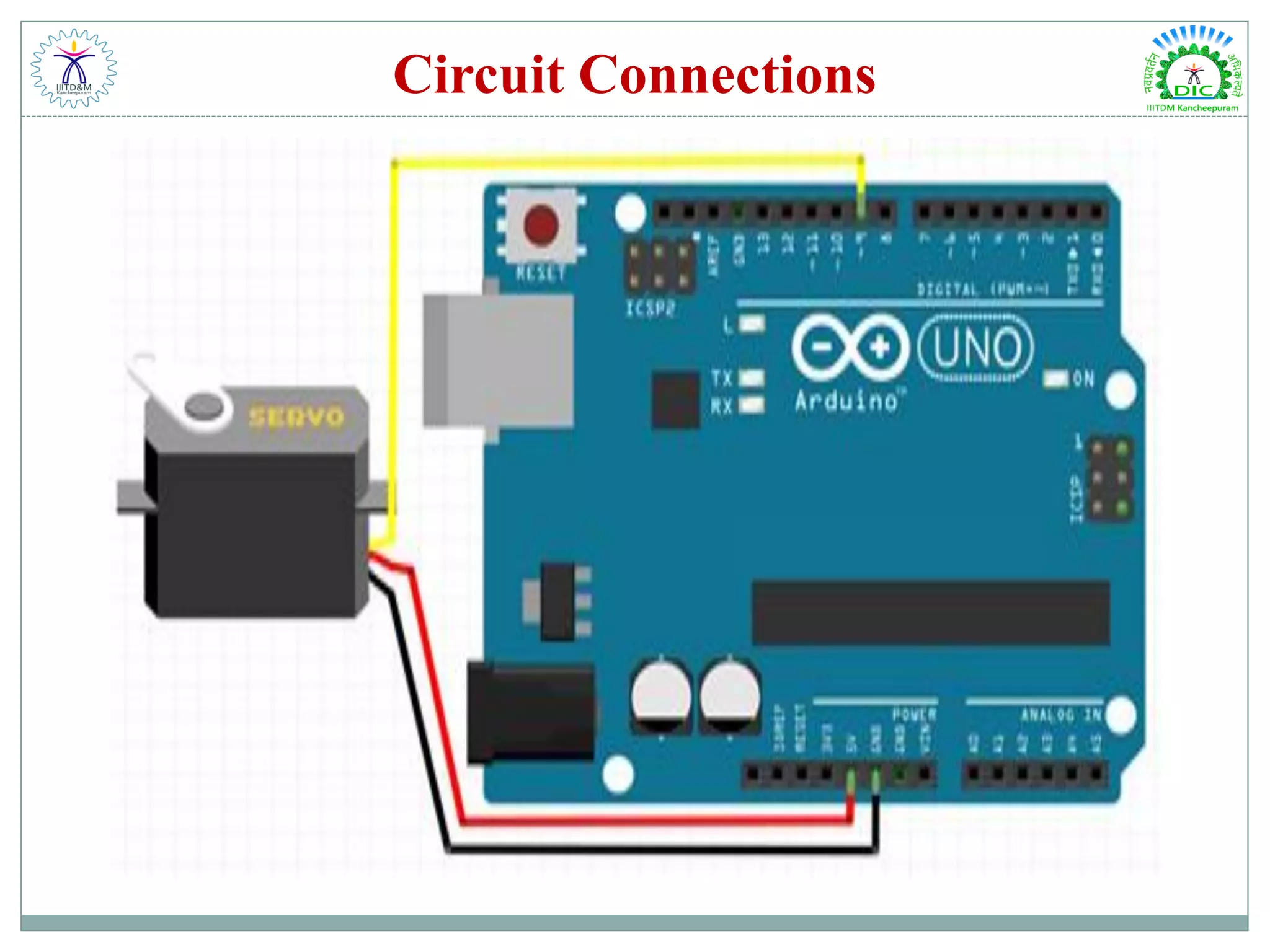
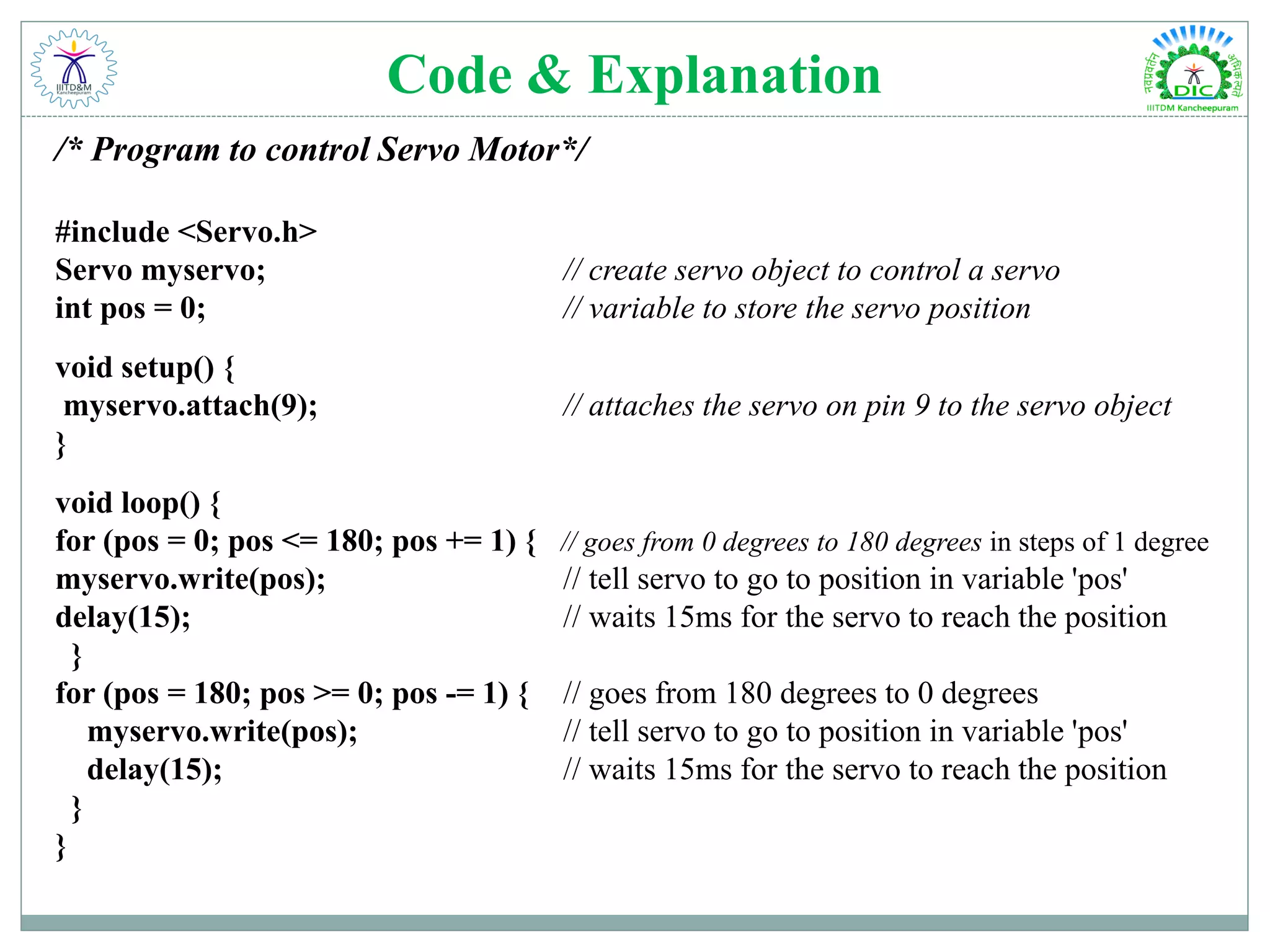
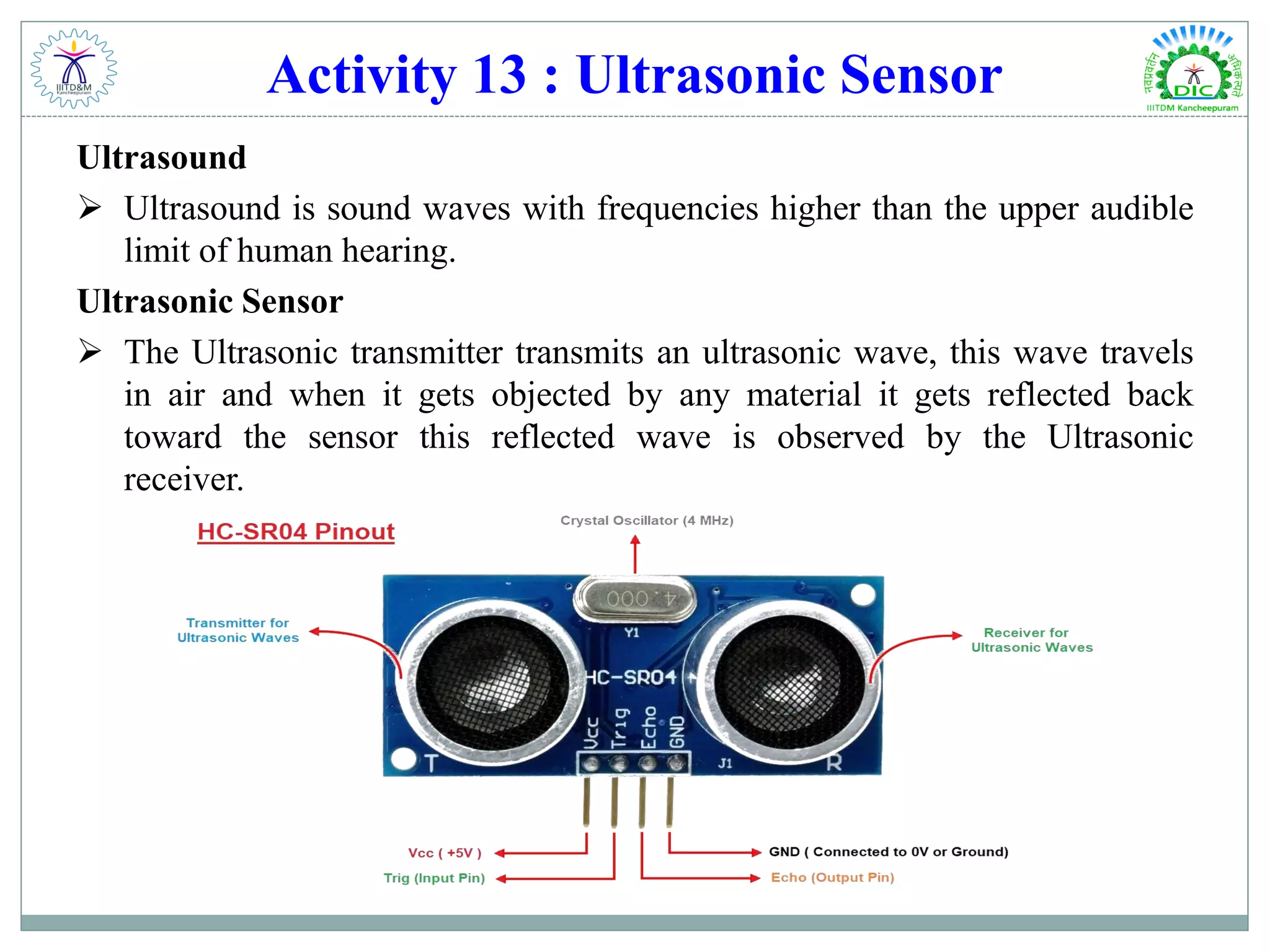
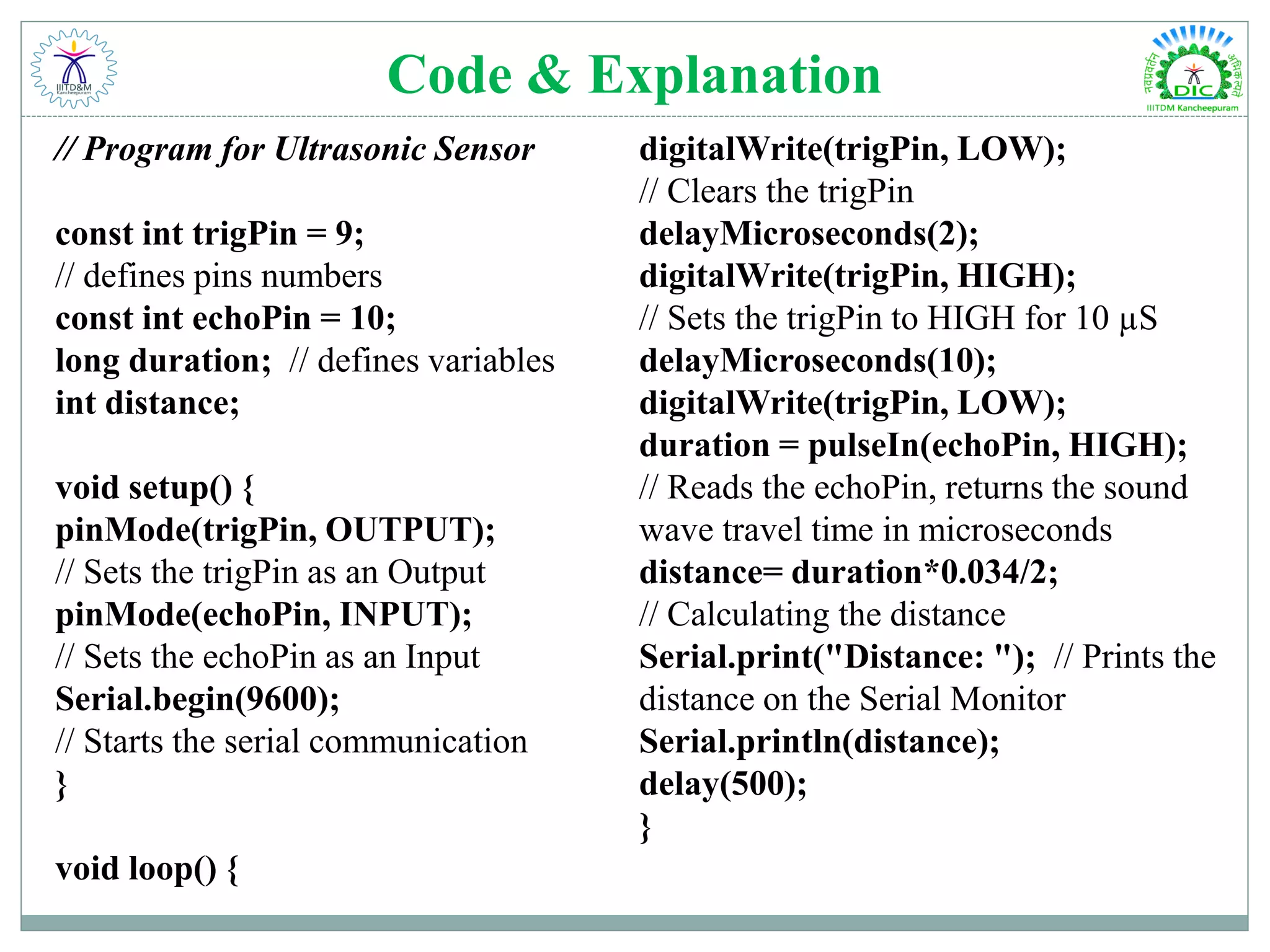
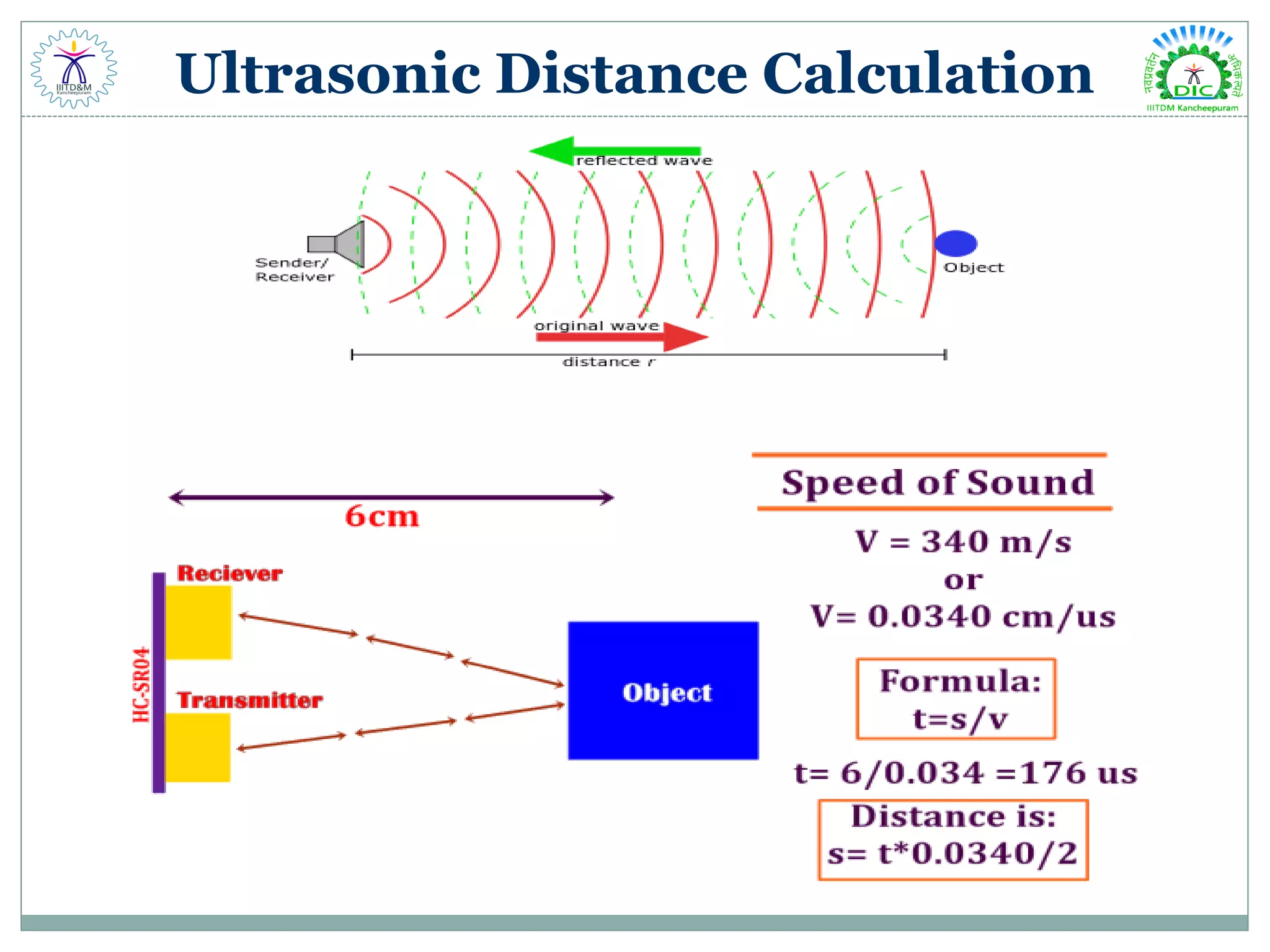
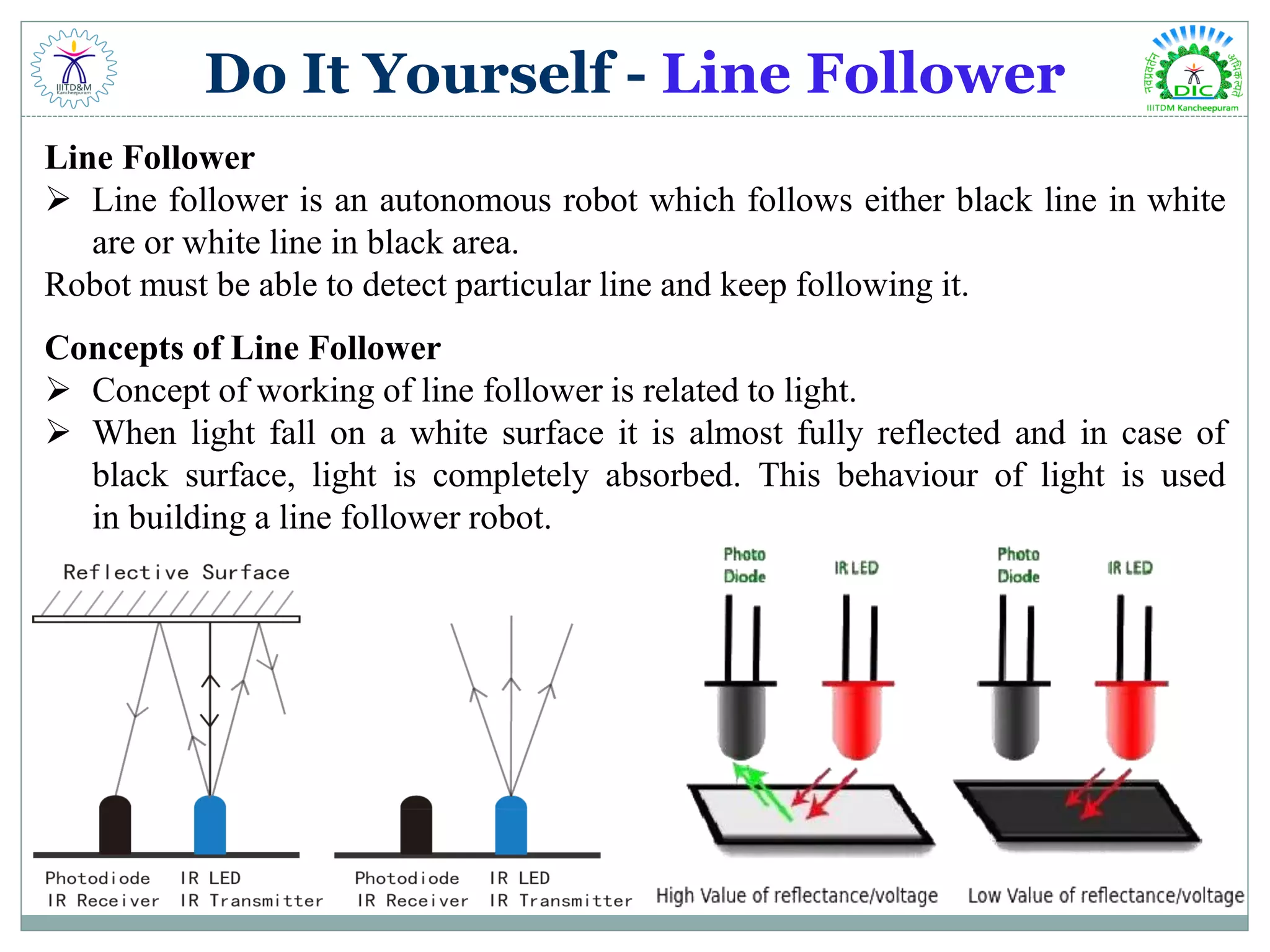
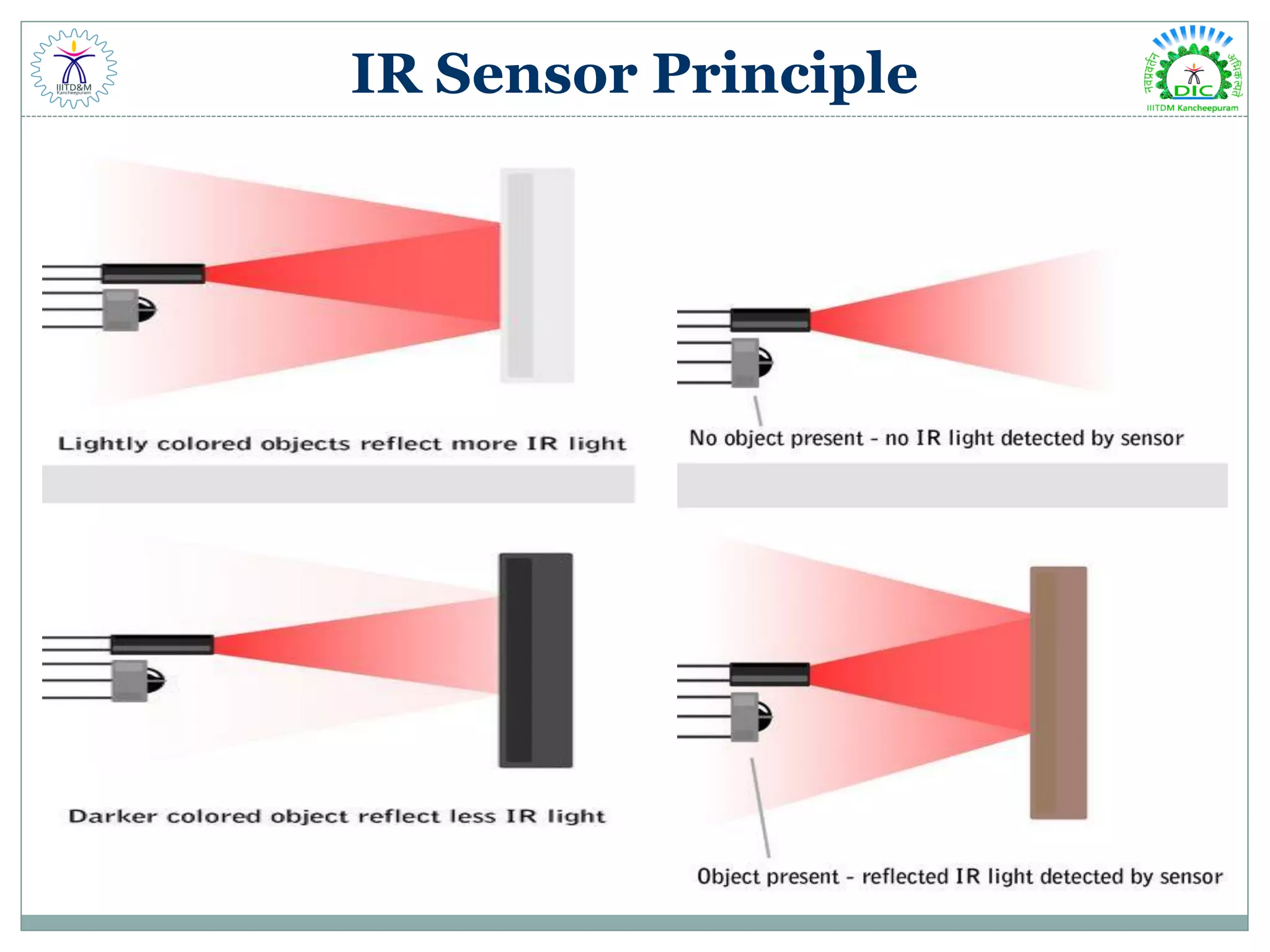
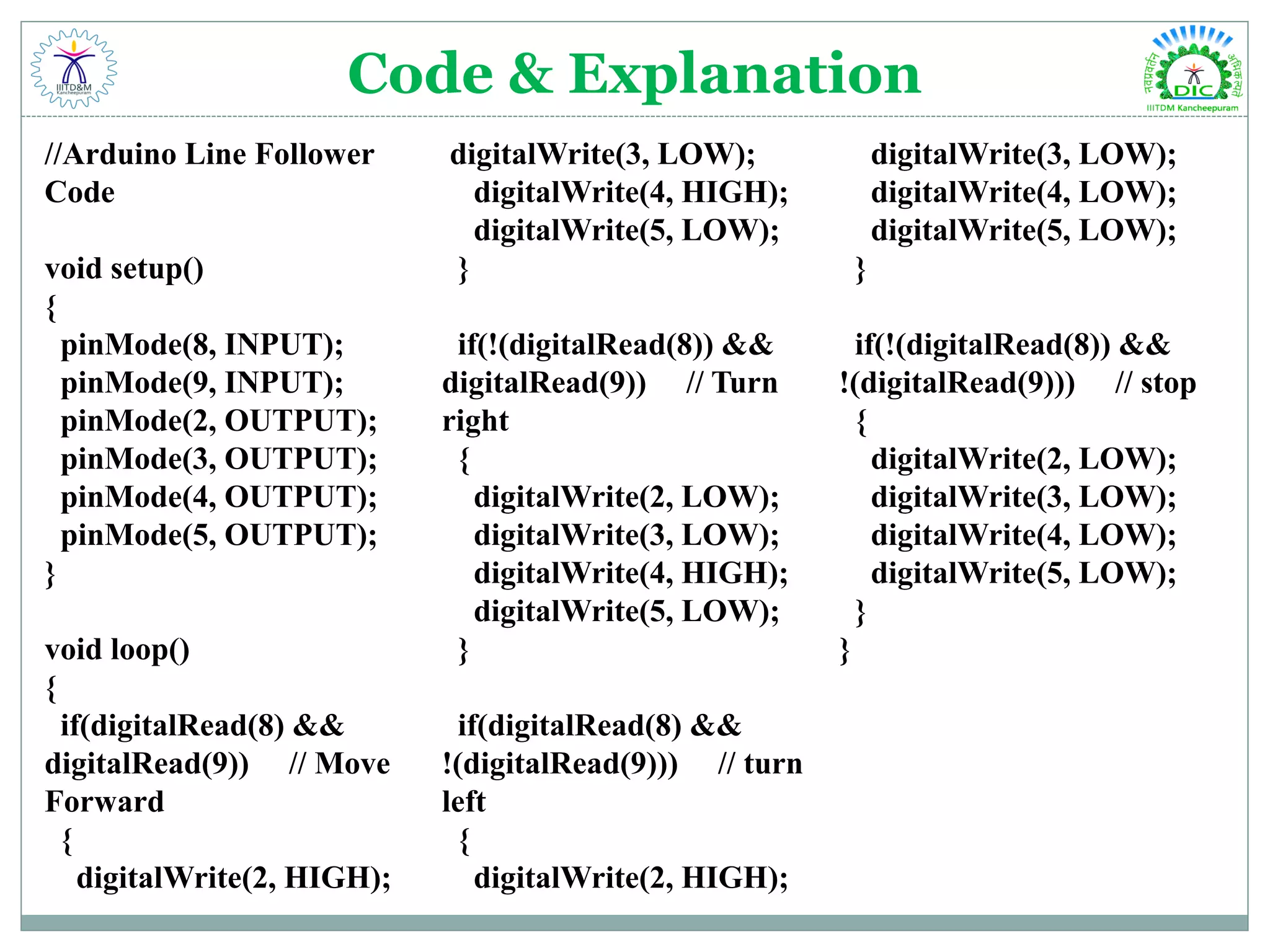
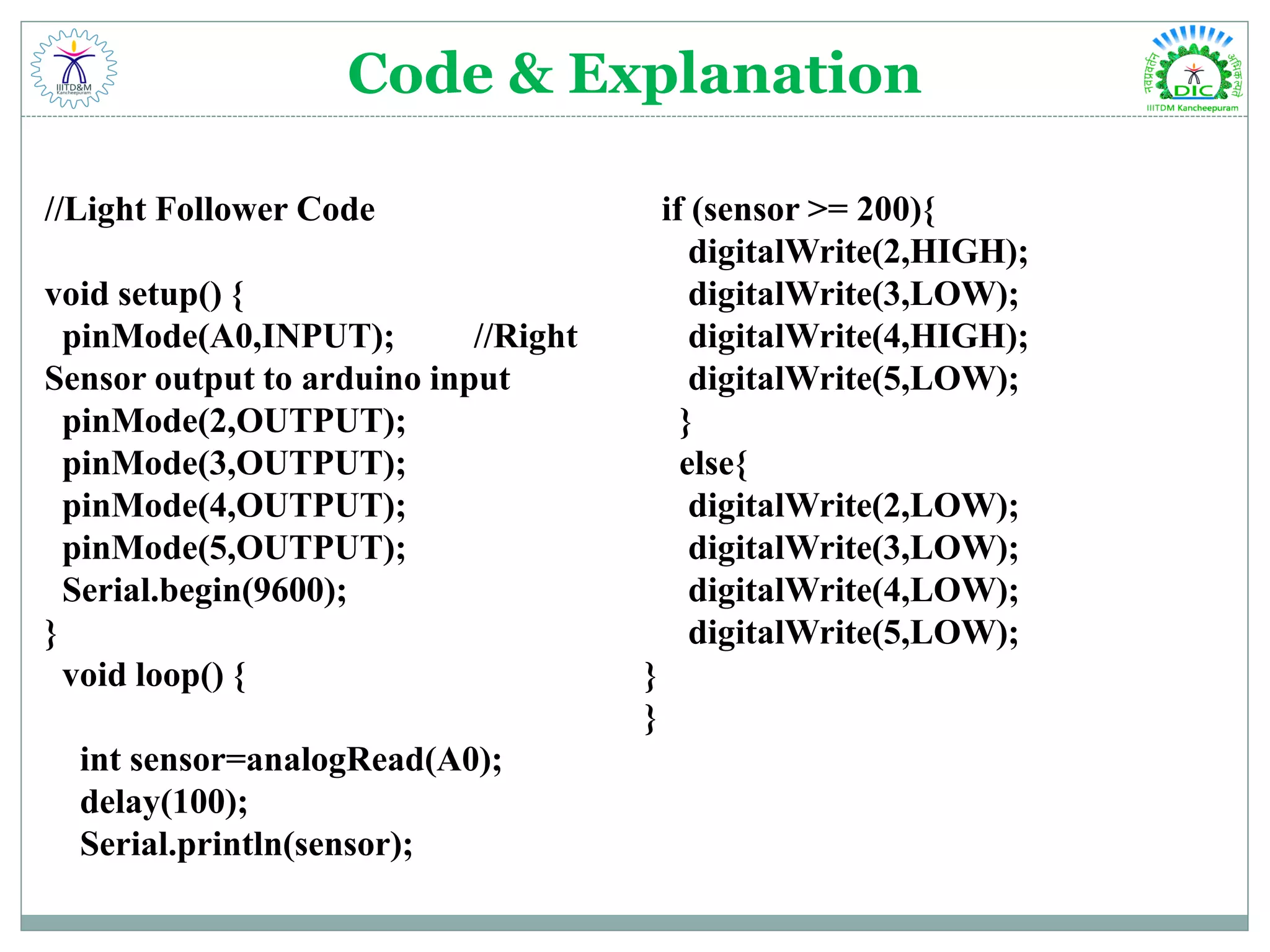
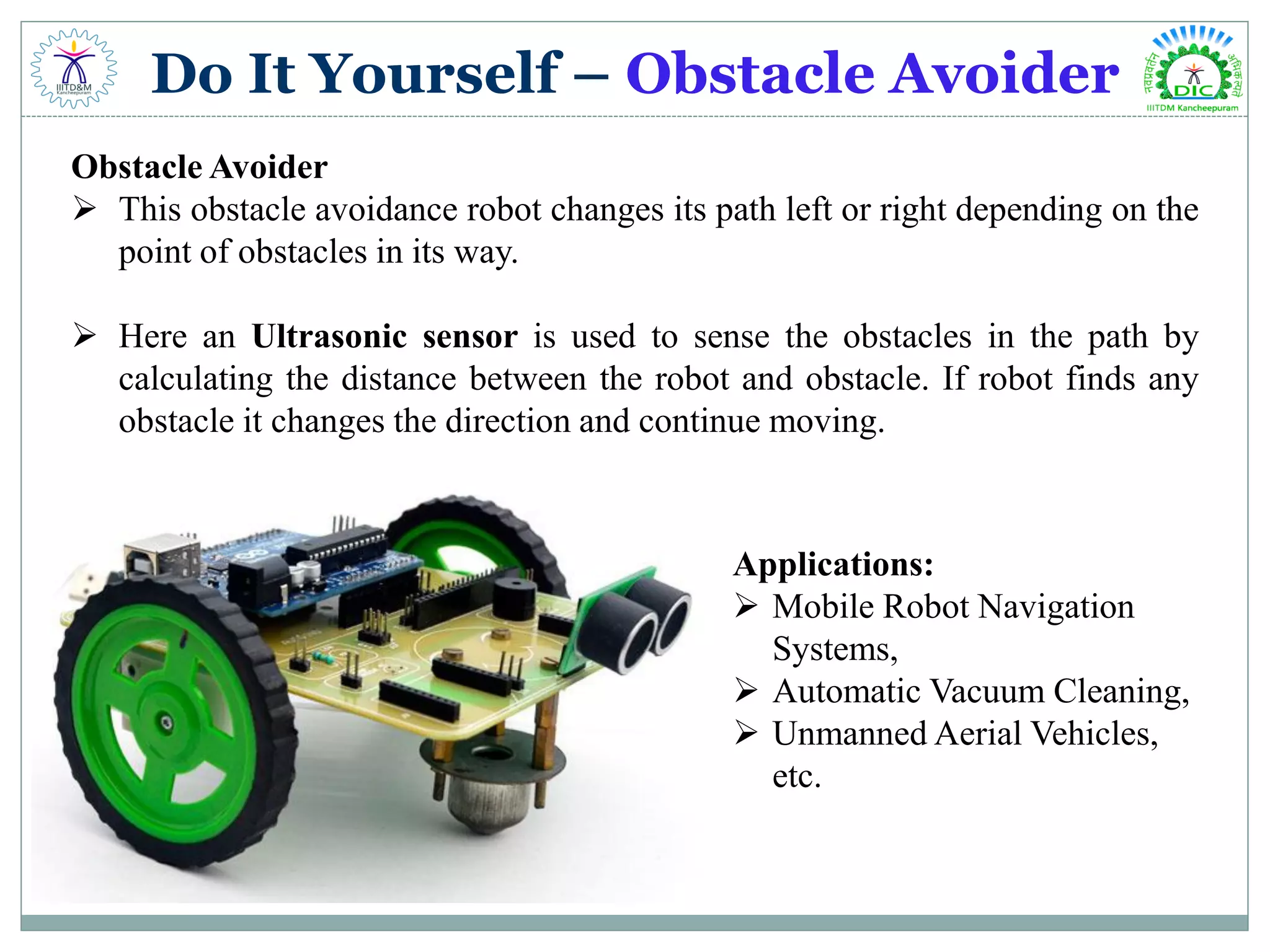
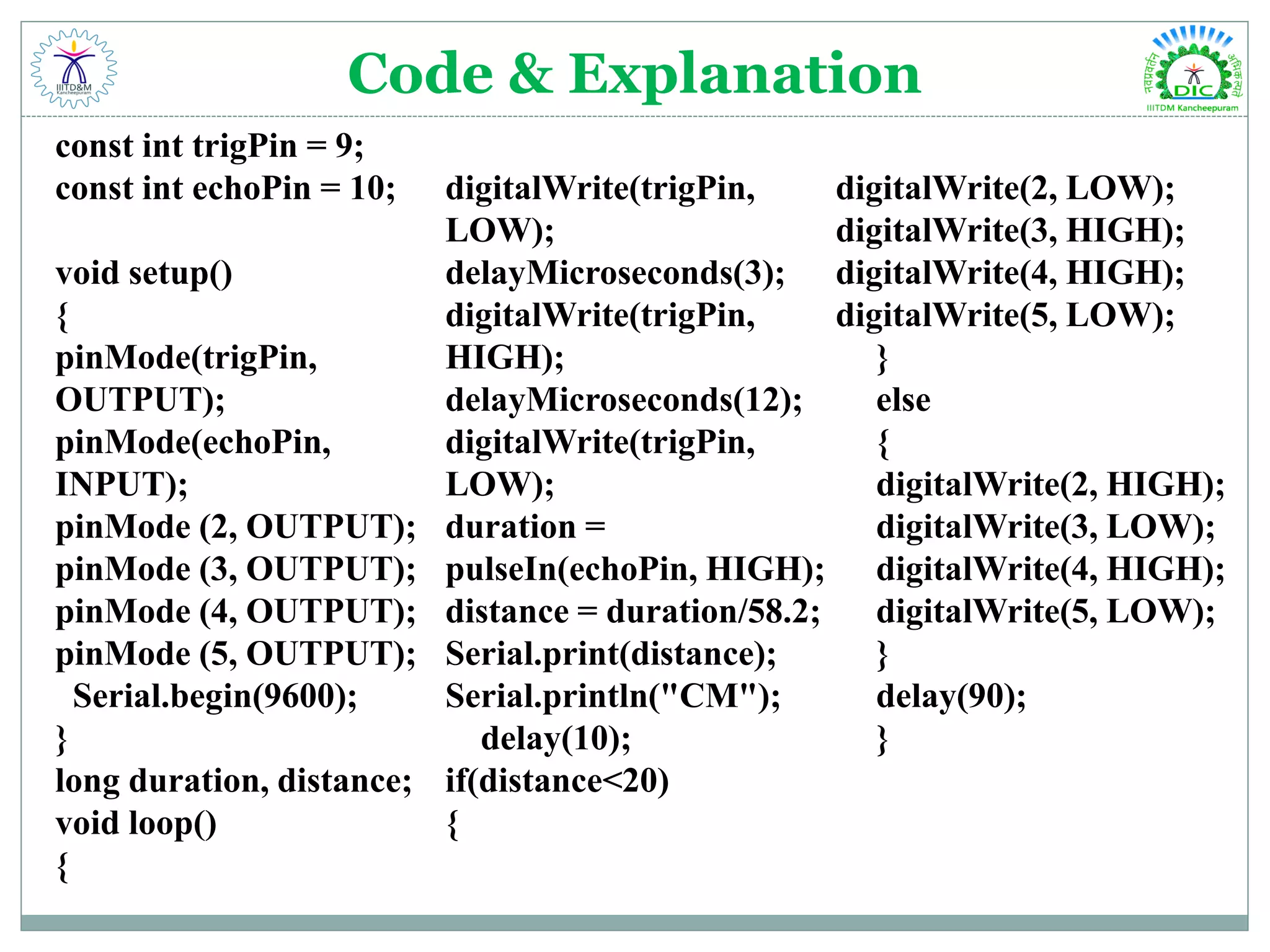
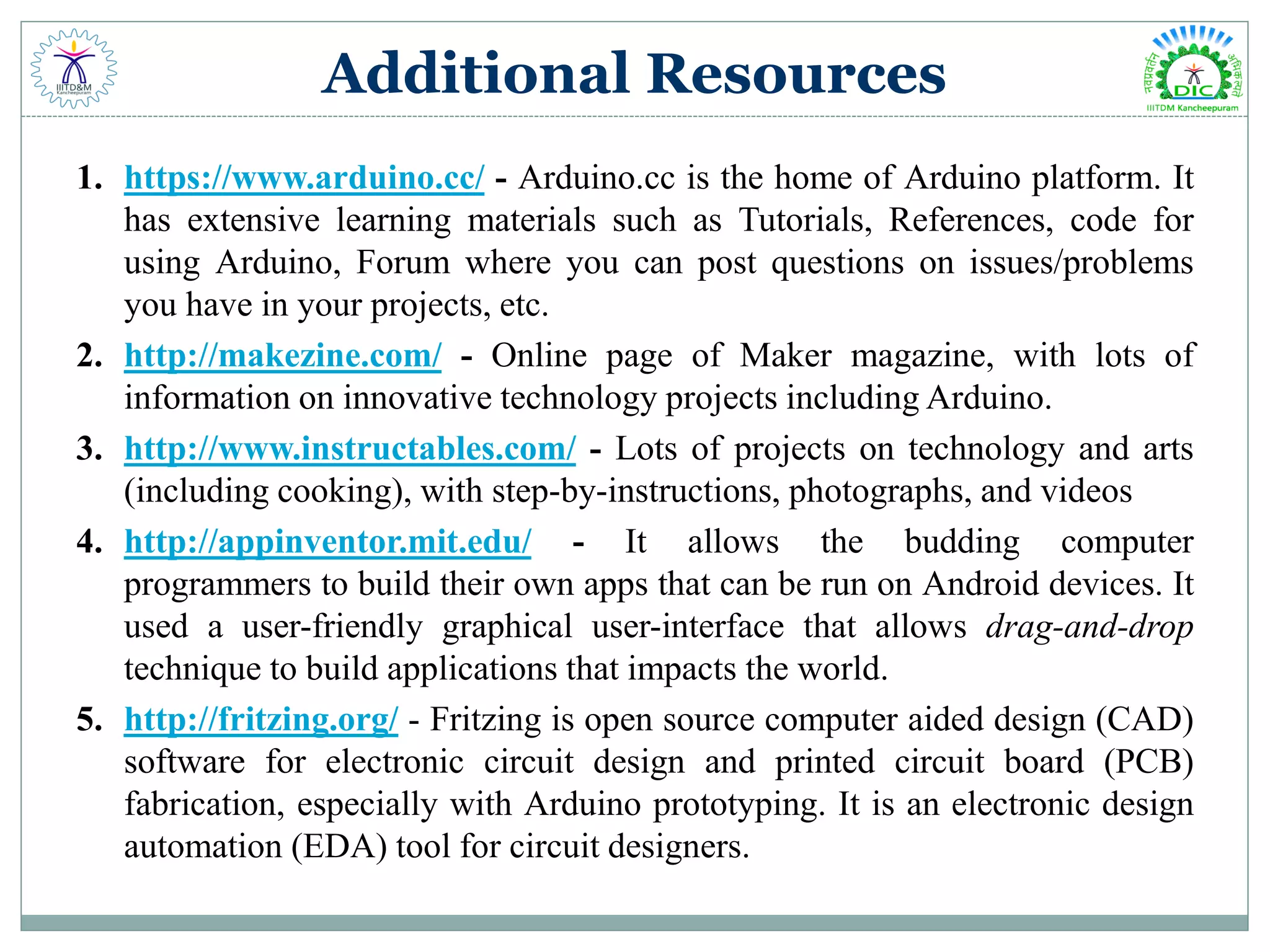
The document discusses various robotics activities using Arduino, including controlling DC motors, servo motors, and sensors like DHT11 and ultrasonic sensors. It provides code examples and circuit connections for implementing these activities, highlighting how motor drivers and sensors work. Additional resources for further learning on Arduino and robotics are also included.