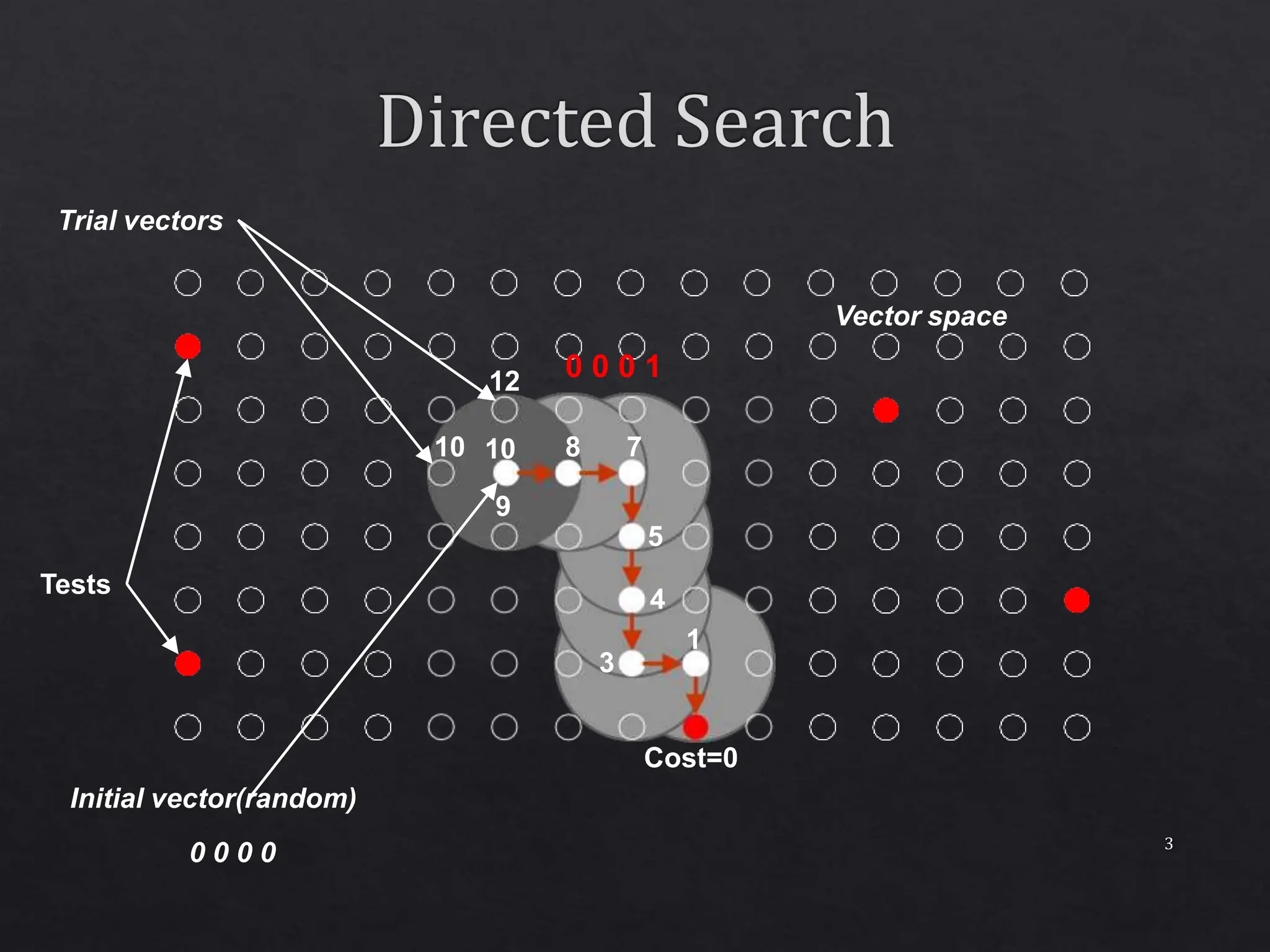
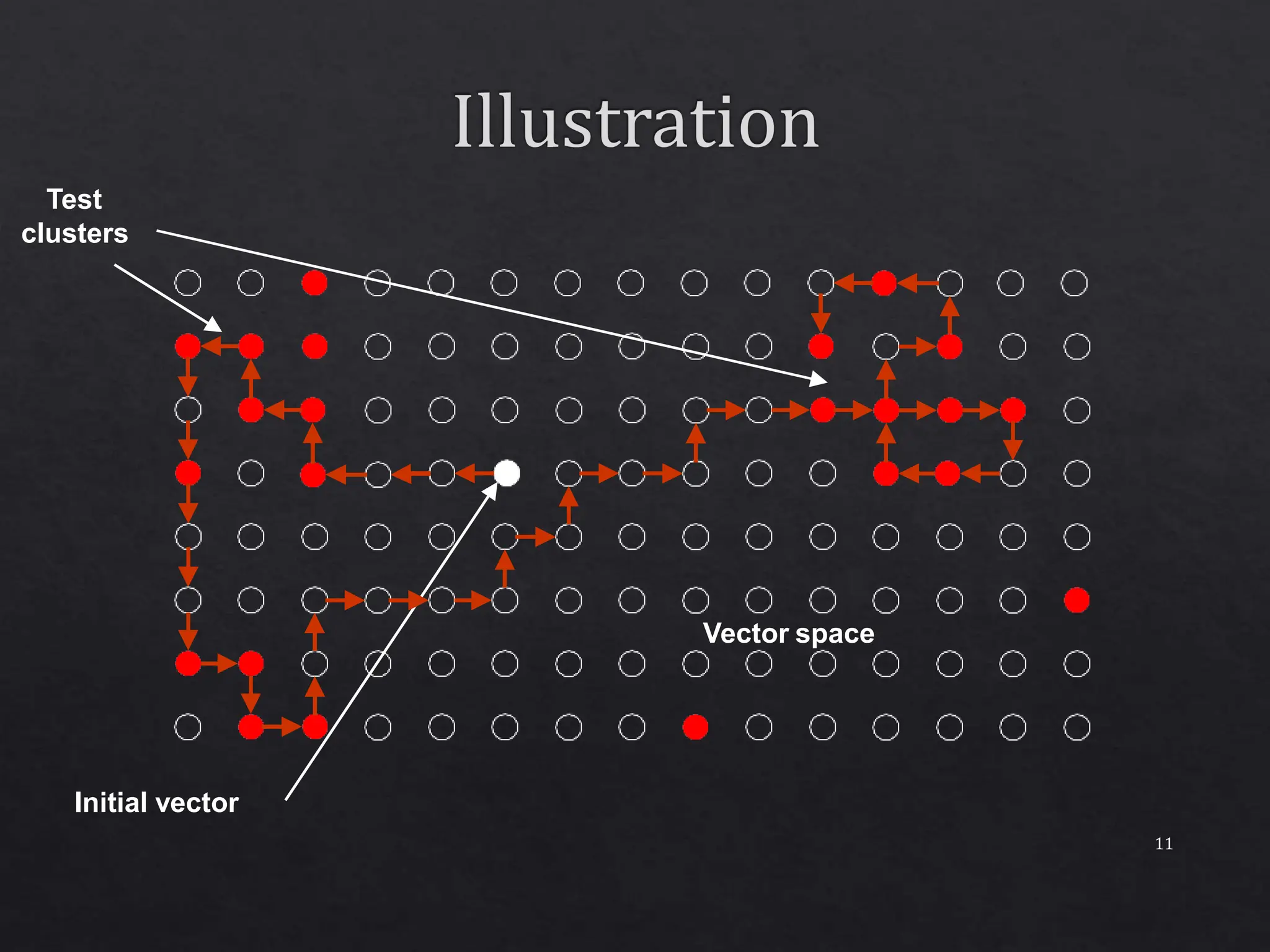
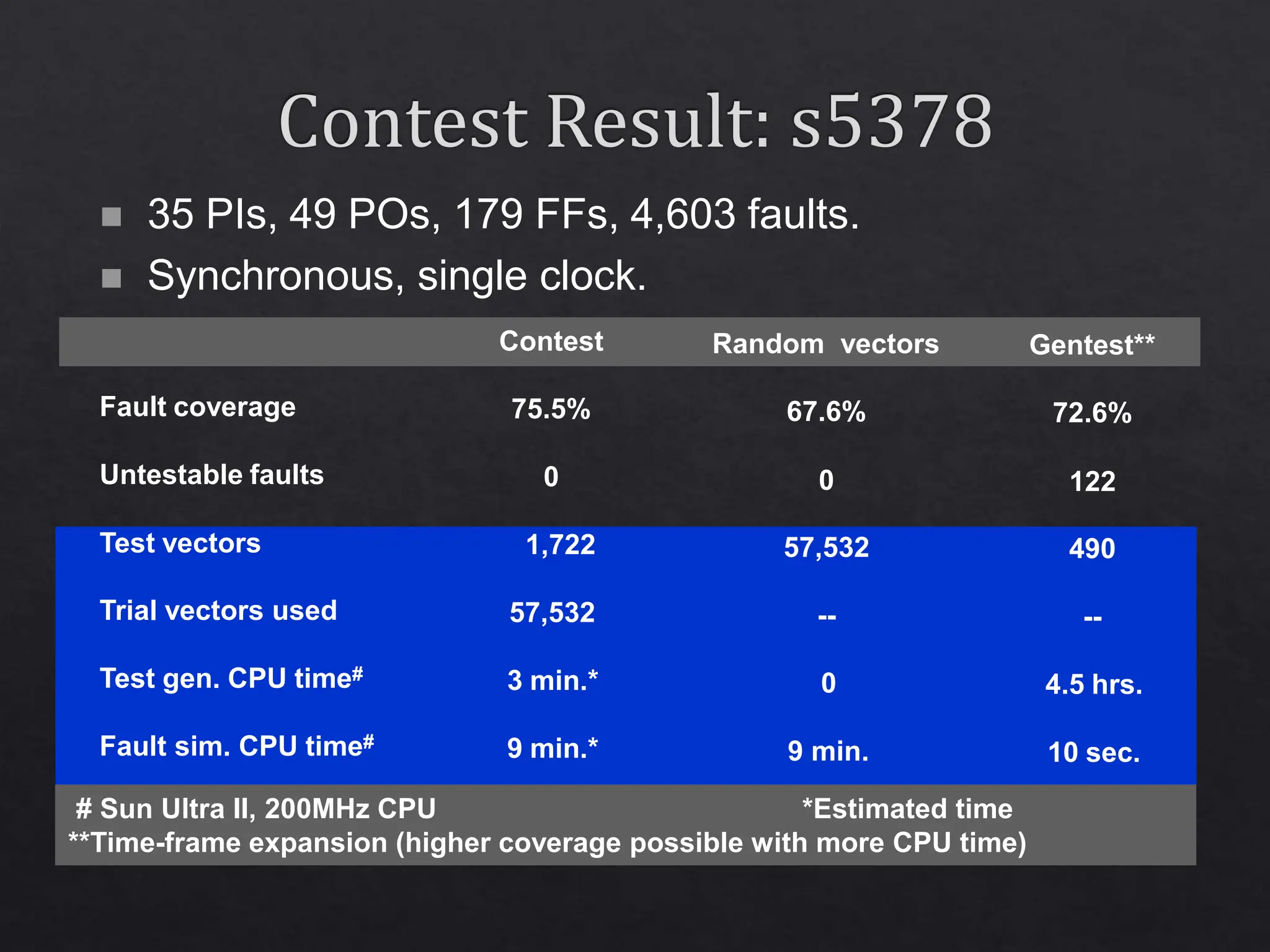
The document discusses a concurrent test generator for sequential circuit testing, developed by Cheng and Agrawal, which utilizes a cost-function based approach for test generation across three phases: initialization, concurrent, and single fault phase. It explains how the process includes generating trial vectors, computing cost functions to optimize the test sequence, and utilizing dynamic testability measures. The document also highlights the characteristics of the circuits being tested and provides performance statistics for various test generation methods.