The Query Processor Functions of query processor: Converts high level SQL queries into a sequence of database operations and executes those operations. Converts high level query to a detailed description. Use query algorithms to efficiently execute a query. 6/27/2025
3.
The Query Processor Major approaches in query processing: Scanning, hashing, sorting, and indexing Algorithms have significantly different costs and structures: Some algorithms assume main memory is available at least one of the relations involved in an operation. Others assume that the arguments are too big to fit in the main memory. Query processing has two parts: Query compilation Query execution. 6/27/2025
4.
Query Compilation Threemajor steps in query compilation: (a) Parsing: Checks the syntax and semantics of the query. A parse tree (or syntax tree) is constructed from the SQL query. Also known as expression tree. [ when parse tree is represented using relational algebra operators] This representation is more succinct. Example: Parse tree shown (right) for the given SQL (left). 6/27/2025
5.
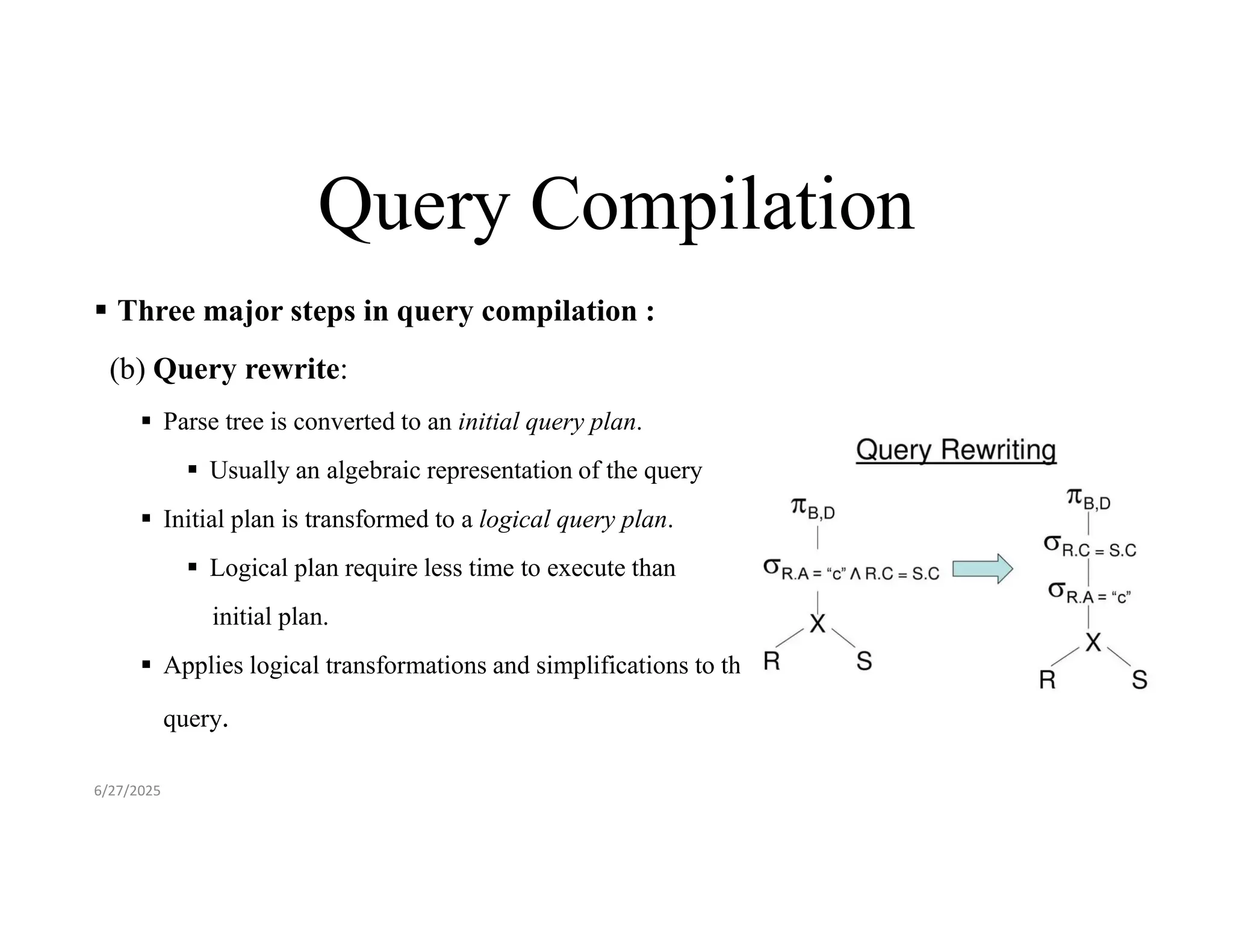
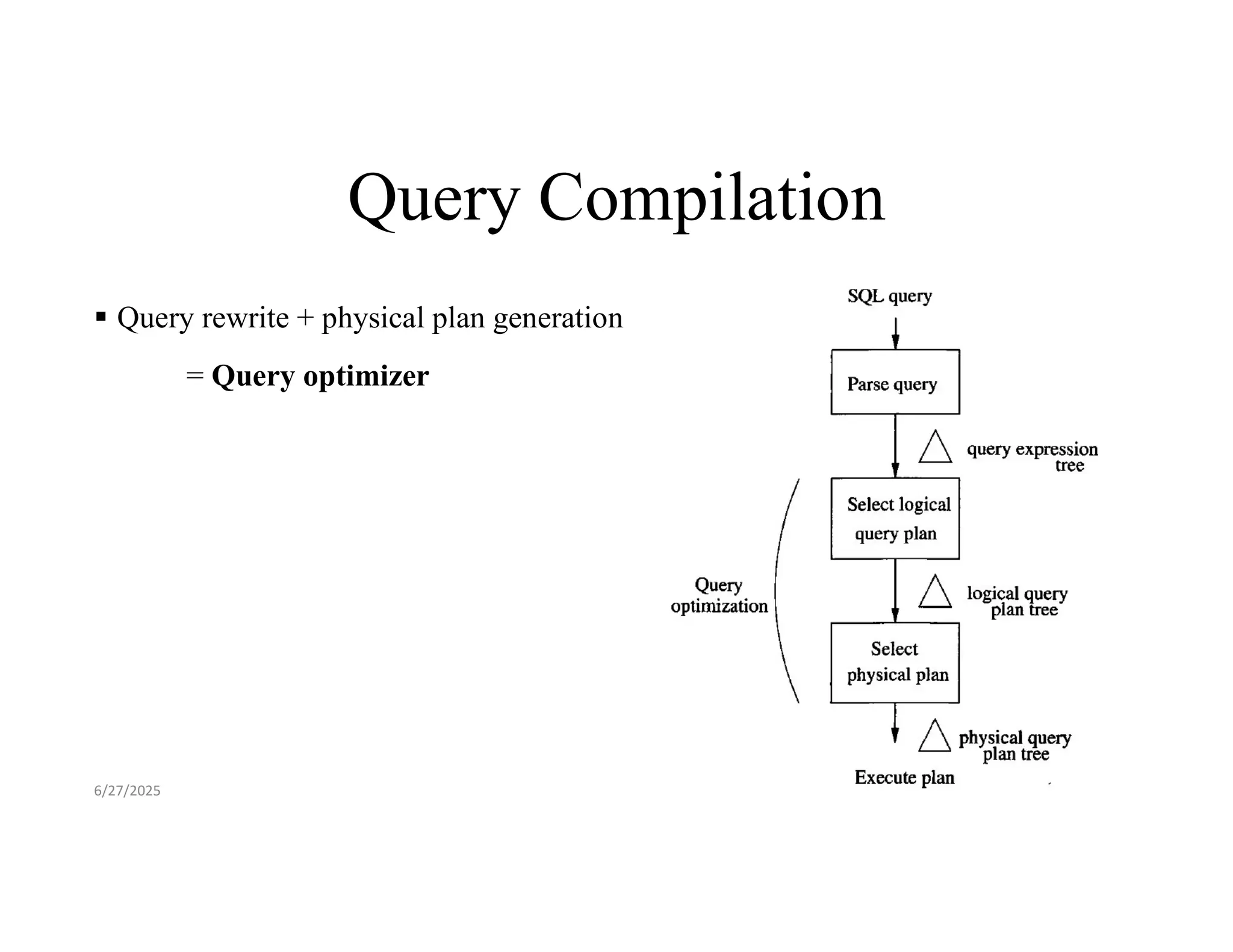
Query Compilation Threemajor steps in query compilation : (b) Query rewrite: Parse tree is converted to an initial query plan. Usually an algebraic representation of the query Initial plan is transformed to a logical query plan. Logical plan require less time to execute than initial plan. Applies logical transformations and simplifications to the query. 6/27/2025
6.
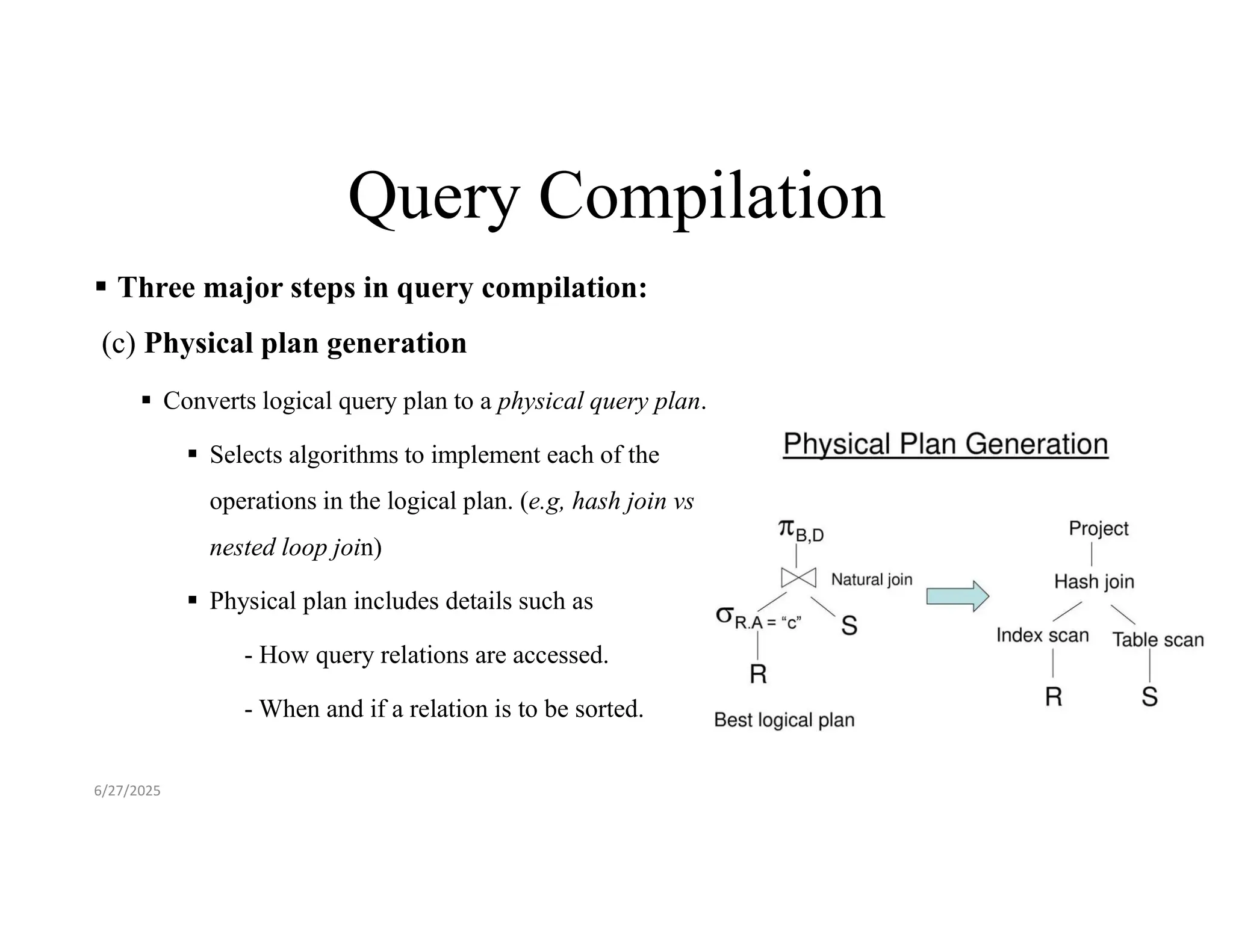
Query Compilation Threemajor steps in query compilation: (c) Physical plan generation Converts logical query plan to a physical query plan. Selects algorithms to implement each of the operations in the logical plan. (e.g, hash join vs nested loop join) Physical plan includes details such as - How query relations are accessed. - When and if a relation is to be sorted. 6/27/2025
7.
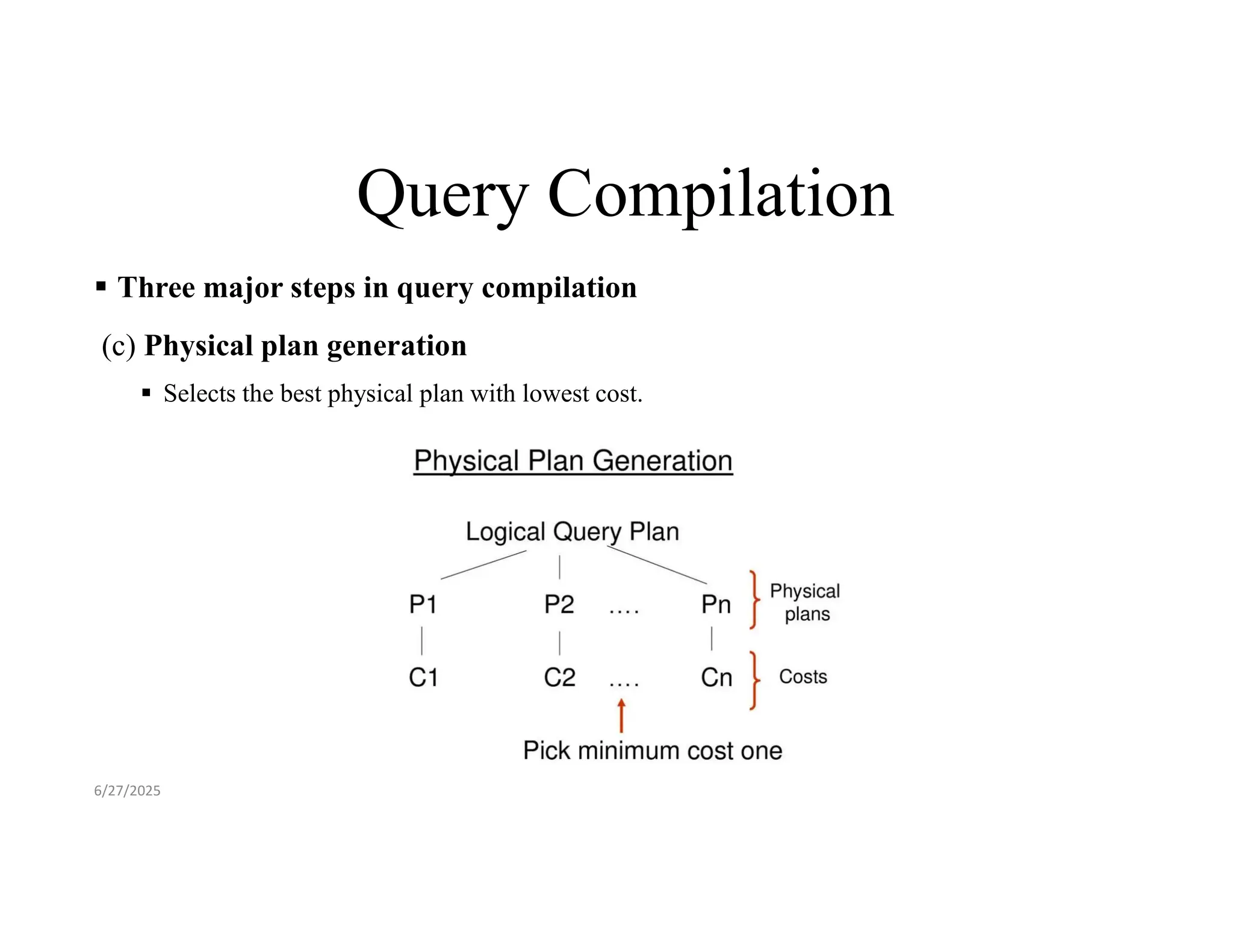
Query Compilation Threemajor steps in query compilation (c) Physical plan generation Selects the best physical plan with lowest cost. 6/27/2025
8.
Physical Query PlanOperators Logical plan vs physical plan: Logical Plan: 𝜎 ='HR' AND salary>50000 (Selection) 𝜋 (Projection) Physical Plan (Possible version): Use Index scan on department Apply Selection: salary > 50000 Apply Projection: name 6/27/2025
Issues to Consider Issue 1: What is the algebraically equivalent forms of a query that leads to the most efficient algorithms for answering the query? Issue 2: For each operation, what algorithms should be used to implement that operation? Issue 3: How should the operations pass data from one to the other, e.g., in a pipelined fashion, in memory buffers, or via the disk? 6/27/2025
11.
Metadata for BestQuery Plan Generation Metadata to consider for best query plan generation: 1 - The size of each relation The number of rows (tuples) in each table (relation). Helps estimate how long it will take to scan a table or join it with another. A small table can be scanned quickly, while a large one might require a more efficient strategy (e.g., using an index or join reordering). 6/27/2025
12.
Metadata for BestQuery Plan Generation Metadata to consider for best query plan generation: 2 - Statistics such as the approximate number and frequency of different values for an attribute Histograms or summaries showing how data is distributed in columns (e.g., how many unique values, how frequently certain values appear). Critical for estimating selectivity (how many rows will match a condition like WHERE age > 40). High selectivity (few matches) means using an index might be efficient; low selectivity (many matches) might require a full scan. 6/27/2025
13.
Metadata for BestQuery Plan Generation Metadata to consider for best query plan generation: 3 - Existence of certain indexes Information on which columns have indexes (e.g., B-tree or hash indexes). Indexes can speed up data retrieval significantly. The optimizer needs to know if indexes exist and whether using them is faster than scanning the whole table. 6/27/2025
14.
Metadata for BestQuery Plan Generation Metadata to consider for best query plan generation: 4 - Layout of data on disk How the data is physically stored—row-wise vs. columnar, clustering of rows, data block sizes, etc. Accessing data stored sequentially on disk is faster than random access. If the data is well-clustered, it could reduce the number of disk I/O operations during a query. 6/27/2025
15.
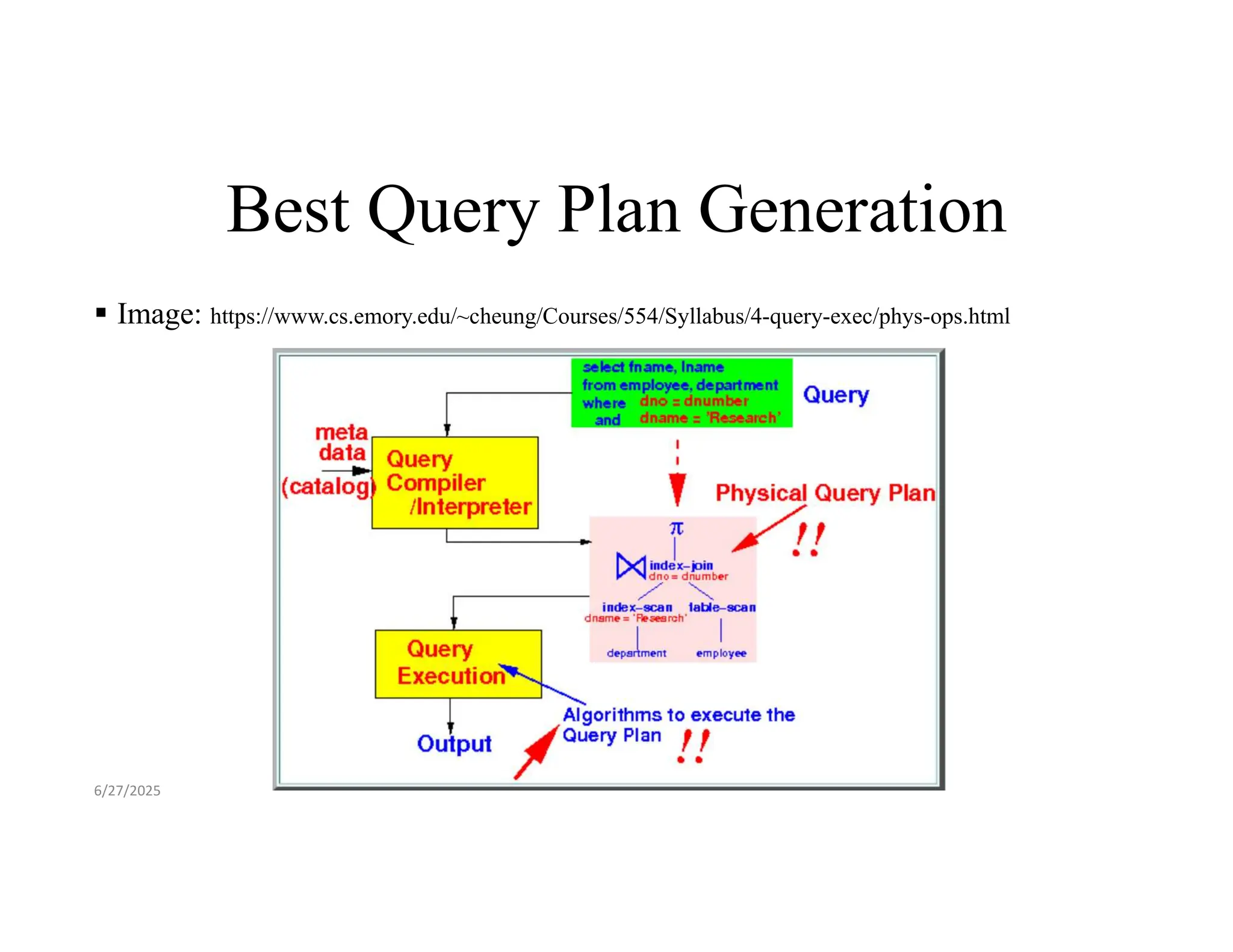
Best Query PlanGeneration Image: https://www.cs.emory.edu/~cheung/Courses/554/Syllabus/4-query-exec/phys-ops.html 6/27/2025
16.
Physical Query PlanOperators Physical query plans are built from operators Physical operators implements logical operations Relational algebra operations: Selection ( ), projection ( ), join ( ), etc. Non-relational algebra operation: Scanning, sorting, hashing, etc. Table-scan, index-scan, etc. 6/27/2025
17.
Scanning operation Scanning: Reads contents of a table (Relation R) Full table scan: Read the entire contents of a relation R. Predicate based scan: Read only those tuples of R that satisfy a given predicate. 6/27/2025
18.
Indexing • B+ treeindex: • Balanced tree structure with multiple levels • Nodes contain ranges of values and pointers to child nodes • Leaf nodes contain the indexed values and pointers to table rows • Efficient for range search. • Preserves order of tuples (when all tuples are retrieved by index). • Hash index: • Array of buckets (hash table) • Uses a hash function to map keys to specific buckets • Each bucket contains pointers to rows with that hash value • Efficient for equality search. • Does not preserve order of tuples (when all tuples are retrieved by index) 6/27/2025
19.
Clustered index • Clusteredindex: • The rows are stored physically on the disk in sored order of index column’s values. • Usually the leaf nodes of the B+ tree index contains table rows (not pointers to table rows) • Table rows are sorted in the leaf nodes in the order of index column’s values. • No separate storage for the table (index is the table itself) • Only one clustered index per table is allowed (because data rows can only be ordered one way). • Usually built on the primary key. 6/27/2025
20.
Table Structure • Heap: •Rows are stored in the order they are inserted. • Blocks are allocated as and when required. • DBMS maintains metadata regarding blocks allocated to a heap table • SQL Server: Index allocation map • Oracle: Segment ExtentBlocks • Clustered index: • The rows are stored physically on the disk in sored order of index column’s values. • Maintains a B+ tree index where leaf nodes contains table rows. • Table rows are stored in the sorted order of index key. 6/27/2025
21.
Scanning Operation Scanningapproaches Table-scan: • Table is stored in secondary memory (disk) and tuples are arranged in blocks. • Blocks are already known to DBMS. • DBMS reads the blocks one by one until the last block is read. This is called table-scan. Usage: • When all blocks of must be read (all rows must be retrieved, e.g, select * from R). • When no useful index on is available (for predicate-based scan). 6/27/2025
22.
Scanning Operation Scanningapproaches Index-scan: • An index exists on an attribute of relation • The DBMS reads the index to get the address of blocks and then retrieve the blocks: • The DBMS retrieves all tuples or only those that meet the condition (index seek). Usage: • When blocks location of are not known to DBMS (all blocks are accessed by index order). • When tuples satisfying a condition on an attribute to be retrieved (index seek operation). [index must be on attribute ] • Data need to be sorted based on index key. [order by index column] 6/27/2025
23.
Sorting While Scanning Why sorting while scanning? Query have ORDER BY clause. Hence, sorting is required for the final output. Some approaches of relationship algebra requires one or both arguments to be sorted relations. 6/27/2025
24.
Sort-Scan Operation Sort-scanoperation: Sorts the relation while scanning. If is to be sorted by attribute and there is a B-tree index on - An index-scan produces sorted . If fits in main memory: - Retrieve tuples of using table-scan or index-scan. - Use a main-memory sorting algorithm. If is too large to fit in main memory: - Use multi-way merge-sort [ discussed later ]. 6/27/2025
25.
Query Execution Cost A query consists of several relational algebra operations. A physical query plan consists of several physical operators. Each operator implements an operation (relational/non-relational). Assumptions: Arguments of operation are in disk. Final result is left in main memory or pipelines [don’t matter for cost calculation, why?] Measure of cost: Number of disk I/Os. [primary cost] Why? It takes longer to get data from disk than main memory. 6/27/2025
26.
Parameters for MeasuringCost Main memory cost metric: Main memory is divided into buffers. : number of main-memory buffers available to a operator. can be: - Entire main memory or - A portion of main-memory [typically when several operations share main memory] 6/27/2025
27.
Parameters for MeasuringCost Secondary memory (disk) cost metric: Data is accessed one block at a time from disk. Three parameters: , and . Number of blocks to hold R in disk. - Can be written as , if is implied. Number of tuples in R. - Can be written as , if R is implied. - is the number of tuples in a single block. Number of distinct values of an attribute “ ” in R. 6/27/2025
28.
I/O Cost forScan Operation Cost of table-scan: Number of disk I/Os is [irrespective of clustered vs. non-clustered] Cost of index-scan: Number of disk I/Os is approximately: [If is clustered index] [If is not clustered index] Cost Typically, we assume all relations are clustered index [unless otherwise stated]. 6/27/2025
29.
I/O Cost forScan Operation Cost of sort-scan: If is a clustered-index - Perform an index-scan to read [already sorted] - Cost = If fits in main memory: - Read into memory. - Perform an in-memory sort on . - Cost = If does not fit in main memory: - Cost > [algorithm discussed later] 6/27/2025
30.
I/O Cost forIndex-scan Operation Cost of index-scan: Read the index first: blocks read. Read the blocks of : blocks read. [assuming clustered-index] Total = [B(I) << B(R)] = [If Not useful when full is required. Useful when only a part of is required. Only relevant blocks of are retrieved. 6/27/2025
31.
Iterators for PhysicalPlan Operators Iterators are implemented for physical operators: Returns result of operator one tuple at a time. Iterators have following three methods: Open: initializes data structure for getting blocks and tuples. Getnext: returns the next tuple in the result. Close: clears data structure. 6/27/2025
32.
Types of algorithmsfor physical plan operators One pass algorithms Involve reading each data blok only once from disk. Require at least one argument to fit in main memory. Two-pass algorithms Relations are too large to fit in main memory. Involve each block two times read from disk. Read first time from disk, process in some way, write to disk, and reads a second time from disk. 6/27/2025
33.
Types of algorithmsfor physical plan operators Many-pass algorithms Data has no limit. Involve three or more passes. Each data block is read three or more times from the disk 6/27/2025
34.
Types of PhysicalPlan Operations Tuple-at-a-time, Unary Operations Operations require only one-tuple at a time for producing outputs. Example operators: Selection: Projection: Do not require entire relation in memory at once. Read one block at a time in a main-memory buffer and produce the output. 6/27/2025
35.
Types of PhysicalPlan Operations Full-relation, Unary Operations Operation requires full-relation access to produce outputs. Example operators: Gamma: (grouping operator) Delta: (duplicate-elimination operator) Require all or most of the tuples in memory at once. [ Why? ] One pass algorithms can be used only if fits in . 6/27/2025
36.
Types of PhysicalPlan Operations Full-relation, Binary Operation Operation requires full-relation access to produce outputs. Example operators: Union: Intersection: Natural join: Cartesian product (cross join): One pass algorithm may be used if at least one argument fits in main- memory. 6/27/2025
37.
One pass Algorithmfor Tuple-at-a-time Operation Relational algebra operations: and Approach: Read blocks one at a time in an input buffer. Perform the operation on each tuple and move selected tuple to the output buffer. Requirement: regardless of . I/O Cost: if is clustered index or table-scan is used. if is not clustered index and index-scan is used. [very expensive] Exception: For predicate-based selection for which an index is available, use index to retrieve a subset of . Cost of index-scan: < B(R) [index-seek] 6/27/2025
38.
One-pass Algorithm forUnary, Full-Relation Operation Relational algebra operation: [Duplicate elimination] Use one memory block to hold one block of Use remaining buffers to hold output tuples [single copy of each tuple of ]. Algorithm: For each tuple in retrieved block: If it is already in output tuples, then discard (don’t copy to output buffer). Otherwise copy to output block. 6/27/2025
39.
One-pass Algorithm forUnary, Full-Relation Operation Cost of checking whether a tuple already exists in output list: if checking required proportional to [size of output], total time = for duplicate checking. if used a hash table with a large number of buckets for output list. Requirement: . [size of R with unique tuples should fit in M-1 buffers ] What if ? Outputs doesn't fit in main memory. Output must be moved to disk back and forth, resulting in thrashing. Increases I/O cost for duplicate checking. 6/27/2025
40.
One-pass Algorithm forUnary, Full-Relation Operation Grouping operation: Involves zero or more grouping attribute One or more aggregate attributes Algorithm: If we create one entry for each group in main memory: - Scan the blocks of one at a time. - For each tuple, find the entry corresponding to the tuple and update aggregated result of the group. - For aggregate, record the and seen so far. - For aggregation, add one to accumulated value. - For aggregation, add the value of a to the accumulated sums. - For , use two accumulations, and 6/27/2025
41.
One-pass algorithm forUnary, Full-Relation Operation Result generation: When all tuples of are read. Output contains one entry for each group from the main memory. Requirement: Efficient data structure for finding group entry for a tuple. Hash tables or balanced trees can be used. Number of disk I/Os: Memory buffers requirement: . [Size of R with unique rows should fit in M-1 buffers] 6/27/2025
42.
Binary Operations: BagUnion Bag union: R and S are bags. Union keeps all tuples. Algorithm: First copy every tuple of Then copy every tuple of Number of disk I/Os: Number of memory buffers required: suffices. [ no need to store; pipelining allows outputs one tuple-at-a-time ] 6/27/2025
43.
Binary Operations: SetUnion Set union: R and S are sets. Union keeps one copy of each common tuple occurring in both R and S. 6/27/2025
44.
Binary Operations: SetUnion Algorithm for : Assume First read and copy in main memory buffers, build a main memory data structure on search key [ entire tuple is the search key ] Copy all tuples of into output. Retrieve one block of at a time in main memory buffer. For each tuple of , check if it is also in [ using main memory data structure on search key ] If it is not in , copy it to output. Efficient data structure is required for storing 𝐵(𝑆) in main memory so that check operation can be done efficiently. If it is in , don’t copy. 6/27/2025
45.
Binary Operations: SetUnion Set union: Number of disk I/Os required: Number of memory buffers required: . [ At least one of R and S must fit in M-1 buffers ] 6/27/2025
46.
Binary Operations: SetIntersection Set Intersection: . and are sets. Intersection keeps only common tuples of R and S. Algorithm: Assume . Read into main memory buffers, build a search data structure [key is full tuple] Read each block of For each tuple of , check if it is also in [using main memory data structure on search key to check] If it is in , copy it to output. If it is not in , don’t copy. Number of disk I/Os required: . Number of memory buffers required: . 6/27/2025
47.
Binary Operations: SetDifference Set Difference: . and are sets. Keeps tuples of R that are not in S. Algorithm: Assume Read into main memory buffers, build a search data structure [search key is full tuple] Read each block of For each tuple of , check if it is also in If it is not in , copy it to output. If it is in , don’t copy to output. Number of disk I/Os required: Number of memory buffers required: [ At least one of R and S must fit in M-1 buffers ] 6/27/2025
48.
Binary Operations: BagIntersection Bag intersection: . R and S are bags. Bags allow multiples copies of the same tuple. Also known as multi-sets. An element appears in the intersection the minimum of the number of times it appears in either. 6/27/2025
49.
Binary Operations: BagIntersection Algorithm for bag intersection: Assume Read into main memory buffers, build a search data structure [key is full tuple] along with a count value. Main memory stores only unique tuples of . Count is the number of times tuple occurs in . Read each block of For each tuple of , check if it is also in and check the count: If count is positive, decrease by one, and copy the tuple to the output. If count is zero, no action is required. Number of disk I/Os required: Number of memory buffers required: 6/27/2025
50.
Binary Operations: CartesianProduct Cartesian product: R and S are sets. Product implements the cartesian product. Algorithm: Assume Read into main memory buffers, no special data structure is required. Read each block of For each tuple of R: Concatenate it with each tuple of in main memory Send the concatenated tuple to the output. Number of disk I/Os required: . Number of memory buffers required: 6/27/2025
51.
Binary Operations: NaturalJoin Natural join: . Algorithm: Assume . Read into main memory buffers, build a search data structure on with search key = . Read each block of in one remaining memory buffer. For each tuple of : Find the tuple of that agrees with on attributes . Concatenate the matched tuple of with in main memory. Send the concatenated tuple to the output. Number of disk I/Os required: . Number of memory buffers required: 6/27/2025
![Query Compilation Three major steps in query compilation: (a) Parsing: Checks the syntax and semantics of the query. A parse tree (or syntax tree) is constructed from the SQL query. Also known as expression tree. [ when parse tree is represented using relational algebra operators] This representation is more succinct. Example: Parse tree shown (right) for the given SQL (left). 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-4-2048.jpg)
![Scanning Operation Scanning approaches Index-scan: • An index exists on an attribute of relation • The DBMS reads the index to get the address of blocks and then retrieve the blocks: • The DBMS retrieves all tuples or only those that meet the condition (index seek). Usage: • When blocks location of are not known to DBMS (all blocks are accessed by index order). • When tuples satisfying a condition on an attribute to be retrieved (index seek operation). [index must be on attribute ] • Data need to be sorted based on index key. [order by index column] 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-22-2048.jpg)
![Sort-Scan Operation Sort-scan operation: Sorts the relation while scanning. If is to be sorted by attribute and there is a B-tree index on - An index-scan produces sorted . If fits in main memory: - Retrieve tuples of using table-scan or index-scan. - Use a main-memory sorting algorithm. If is too large to fit in main memory: - Use multi-way merge-sort [ discussed later ]. 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-24-2048.jpg)
![Query Execution Cost A query consists of several relational algebra operations. A physical query plan consists of several physical operators. Each operator implements an operation (relational/non-relational). Assumptions: Arguments of operation are in disk. Final result is left in main memory or pipelines [don’t matter for cost calculation, why?] Measure of cost: Number of disk I/Os. [primary cost] Why? It takes longer to get data from disk than main memory. 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-25-2048.jpg)
![Parameters for Measuring Cost Main memory cost metric: Main memory is divided into buffers. : number of main-memory buffers available to a operator. can be: - Entire main memory or - A portion of main-memory [typically when several operations share main memory] 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-26-2048.jpg)
![I/O Cost for Scan Operation Cost of table-scan: Number of disk I/Os is [irrespective of clustered vs. non-clustered] Cost of index-scan: Number of disk I/Os is approximately: [If is clustered index] [If is not clustered index] Cost Typically, we assume all relations are clustered index [unless otherwise stated]. 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-28-2048.jpg)
![I/O Cost for Scan Operation Cost of sort-scan: If is a clustered-index - Perform an index-scan to read [already sorted] - Cost = If fits in main memory: - Read into memory. - Perform an in-memory sort on . - Cost = If does not fit in main memory: - Cost > [algorithm discussed later] 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-29-2048.jpg)
![I/O Cost for Index-scan Operation Cost of index-scan: Read the index first: blocks read. Read the blocks of : blocks read. [assuming clustered-index] Total = [B(I) << B(R)] = [If Not useful when full is required. Useful when only a part of is required. Only relevant blocks of are retrieved. 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-30-2048.jpg)
![Types of Physical Plan Operations Full-relation, Unary Operations Operation requires full-relation access to produce outputs. Example operators: Gamma: (grouping operator) Delta: (duplicate-elimination operator) Require all or most of the tuples in memory at once. [ Why? ] One pass algorithms can be used only if fits in . 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-35-2048.jpg)
![One pass Algorithm for Tuple-at-a-time Operation Relational algebra operations: and Approach: Read blocks one at a time in an input buffer. Perform the operation on each tuple and move selected tuple to the output buffer. Requirement: regardless of . I/O Cost: if is clustered index or table-scan is used. if is not clustered index and index-scan is used. [very expensive] Exception: For predicate-based selection for which an index is available, use index to retrieve a subset of . Cost of index-scan: < B(R) [index-seek] 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-37-2048.jpg)
![One-pass Algorithm for Unary, Full-Relation Operation Relational algebra operation: [Duplicate elimination] Use one memory block to hold one block of Use remaining buffers to hold output tuples [single copy of each tuple of ]. Algorithm: For each tuple in retrieved block: If it is already in output tuples, then discard (don’t copy to output buffer). Otherwise copy to output block. 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-38-2048.jpg)
![One-pass Algorithm for Unary, Full-Relation Operation Cost of checking whether a tuple already exists in output list: if checking required proportional to [size of output], total time = for duplicate checking. if used a hash table with a large number of buckets for output list. Requirement: . [size of R with unique tuples should fit in M-1 buffers ] What if ? Outputs doesn't fit in main memory. Output must be moved to disk back and forth, resulting in thrashing. Increases I/O cost for duplicate checking. 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-39-2048.jpg)
![One-pass algorithm for Unary, Full-Relation Operation Result generation: When all tuples of are read. Output contains one entry for each group from the main memory. Requirement: Efficient data structure for finding group entry for a tuple. Hash tables or balanced trees can be used. Number of disk I/Os: Memory buffers requirement: . [Size of R with unique rows should fit in M-1 buffers] 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-41-2048.jpg)
![Binary Operations: Bag Union Bag union: R and S are bags. Union keeps all tuples. Algorithm: First copy every tuple of Then copy every tuple of Number of disk I/Os: Number of memory buffers required: suffices. [ no need to store; pipelining allows outputs one tuple-at-a-time ] 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-42-2048.jpg)
![Binary Operations: Set Union Algorithm for : Assume First read and copy in main memory buffers, build a main memory data structure on search key [ entire tuple is the search key ] Copy all tuples of into output. Retrieve one block of at a time in main memory buffer. For each tuple of , check if it is also in [ using main memory data structure on search key ] If it is not in , copy it to output. Efficient data structure is required for storing 𝐵(𝑆) in main memory so that check operation can be done efficiently. If it is in , don’t copy. 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-44-2048.jpg)
![Binary Operations: Set Union Set union: Number of disk I/Os required: Number of memory buffers required: . [ At least one of R and S must fit in M-1 buffers ] 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-45-2048.jpg)
![Binary Operations: Set Intersection Set Intersection: . and are sets. Intersection keeps only common tuples of R and S. Algorithm: Assume . Read into main memory buffers, build a search data structure [key is full tuple] Read each block of For each tuple of , check if it is also in [using main memory data structure on search key to check] If it is in , copy it to output. If it is not in , don’t copy. Number of disk I/Os required: . Number of memory buffers required: . 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-46-2048.jpg)
![Binary Operations: Set Difference Set Difference: . and are sets. Keeps tuples of R that are not in S. Algorithm: Assume Read into main memory buffers, build a search data structure [search key is full tuple] Read each block of For each tuple of , check if it is also in If it is not in , copy it to output. If it is in , don’t copy to output. Number of disk I/Os required: Number of memory buffers required: [ At least one of R and S must fit in M-1 buffers ] 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-47-2048.jpg)
![Binary Operations: Bag Intersection Algorithm for bag intersection: Assume Read into main memory buffers, build a search data structure [key is full tuple] along with a count value. Main memory stores only unique tuples of . Count is the number of times tuple occurs in . Read each block of For each tuple of , check if it is also in and check the count: If count is positive, decrease by one, and copy the tuple to the output. If count is zero, no action is required. Number of disk I/Os required: Number of memory buffers required: 6/27/2025](https://image.slidesharecdn.com/chapter15-1-250927110152-77561e3e/75/DBMS-Query-Optimization-along-with-algorithms-49-2048.jpg)