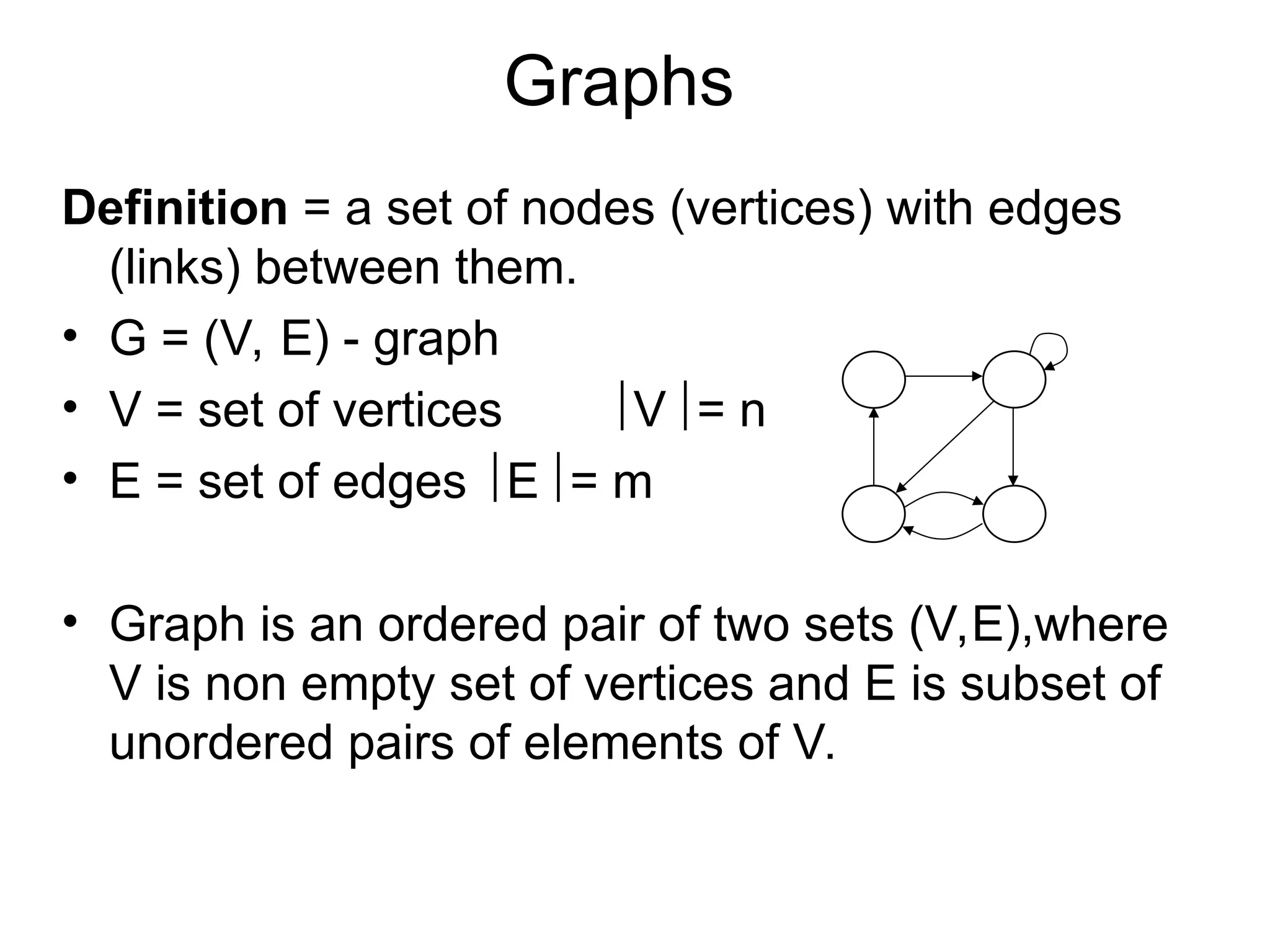
Graphs Definition = aset of nodes (vertices) with edges (links) between them. • G = (V, E) - graph • V = set of vertices V = n • E = set of edges E = m • Graph is an ordered pair of two sets (V,E),where V is non empty set of vertices and E is subset of unordered pairs of elements of V. 1 2 3 4
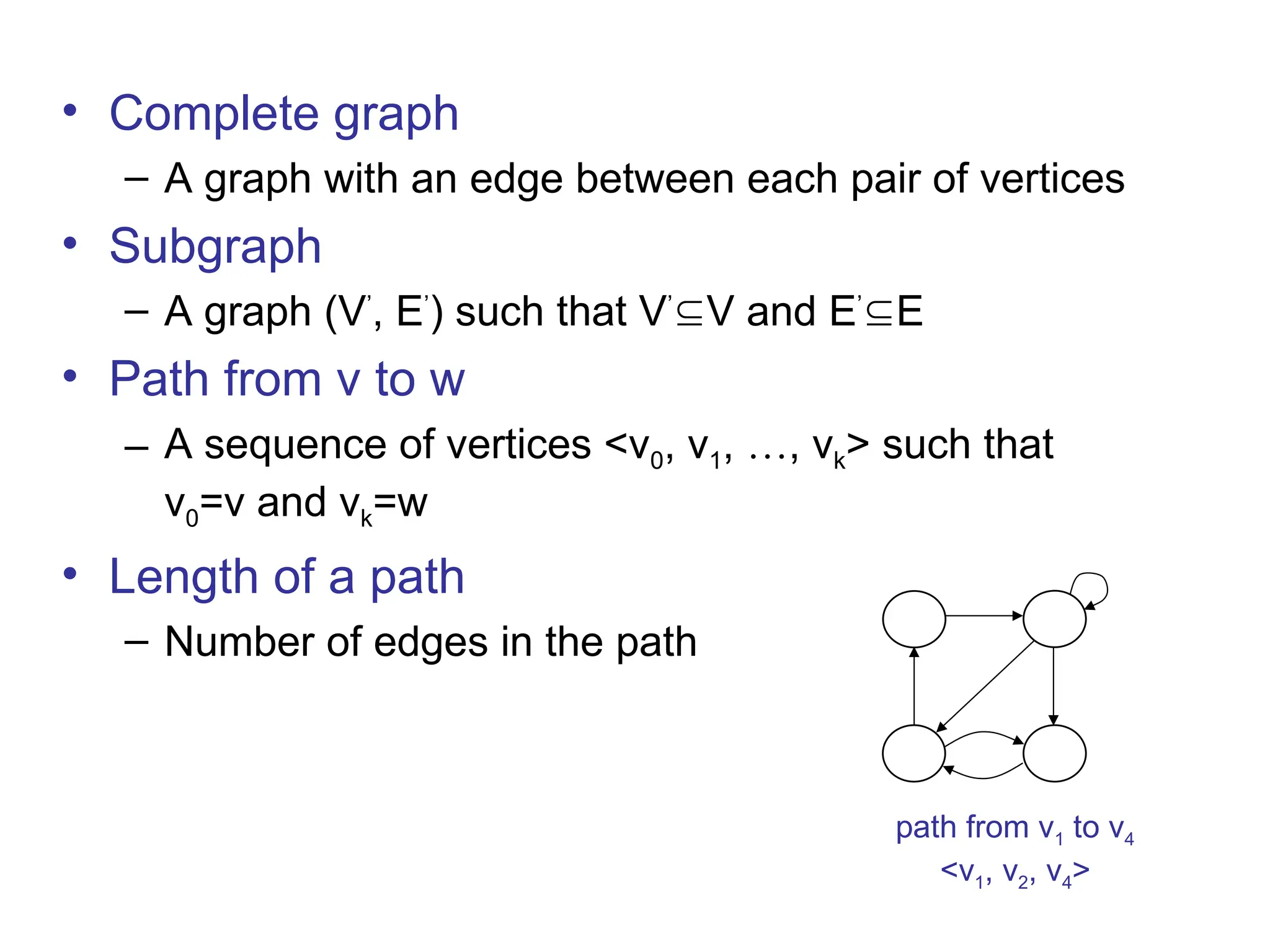
• Complete graph –A graph with an edge between each pair of vertices • Subgraph – A graph (V’ , E’ ) such that V’ V and E’ E • Path from v to w – A sequence of vertices <v0, v1, …, vk> such that v0=v and vk=w • Length of a path – Number of edges in the path 1 2 3 4 path from v1 to v4 <v1, v2, v4>
5.
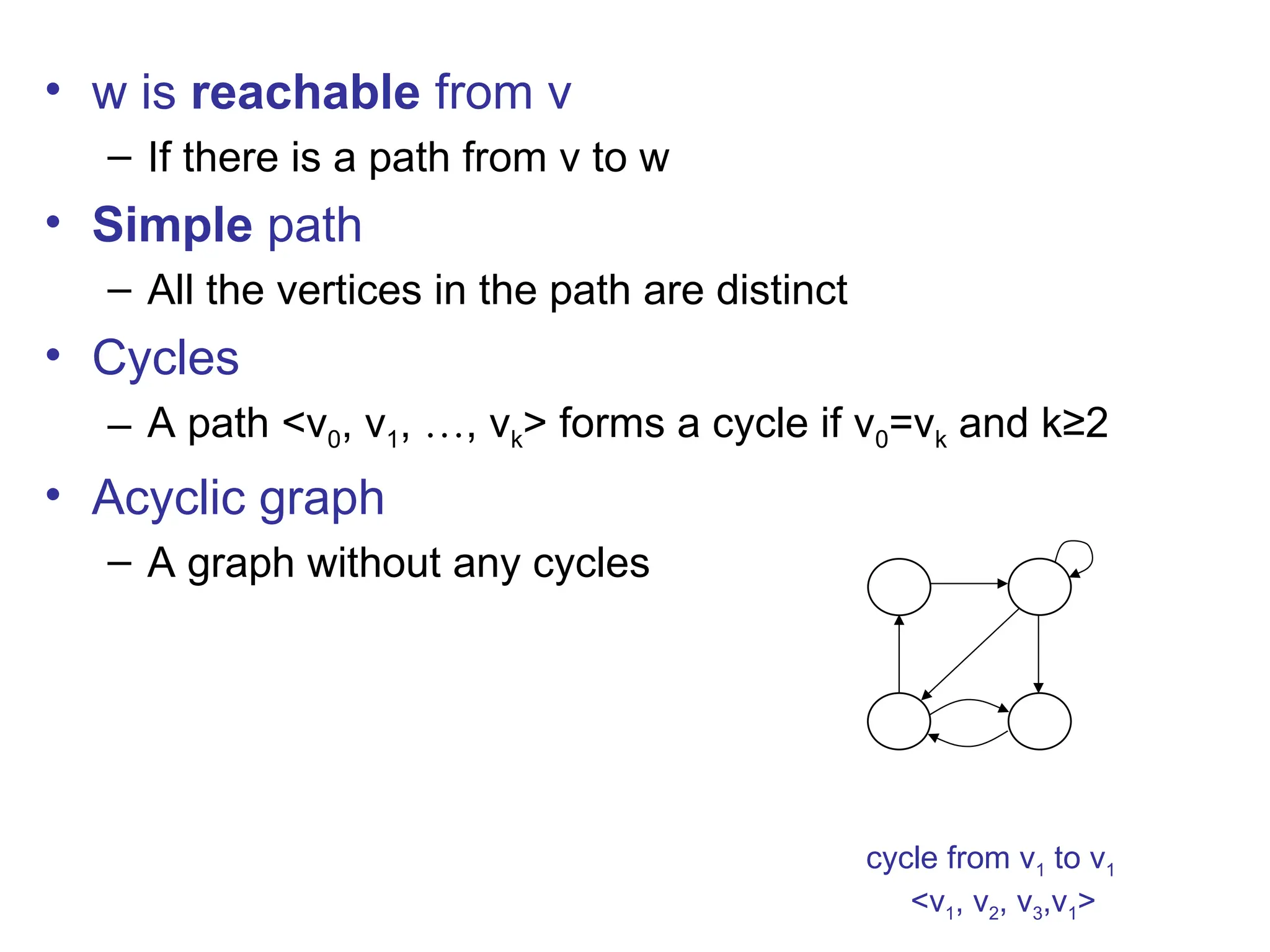
• w isreachable from v – If there is a path from v to w • Simple path – All the vertices in the path are distinct • Cycles – A path <v0, v1, …, vk> forms a cycle if v0=vk and k≥2 • Acyclic graph – A graph without any cycles 1 2 3 4 cycle from v1 to v1 <v1, v2, v3,v1>
6.
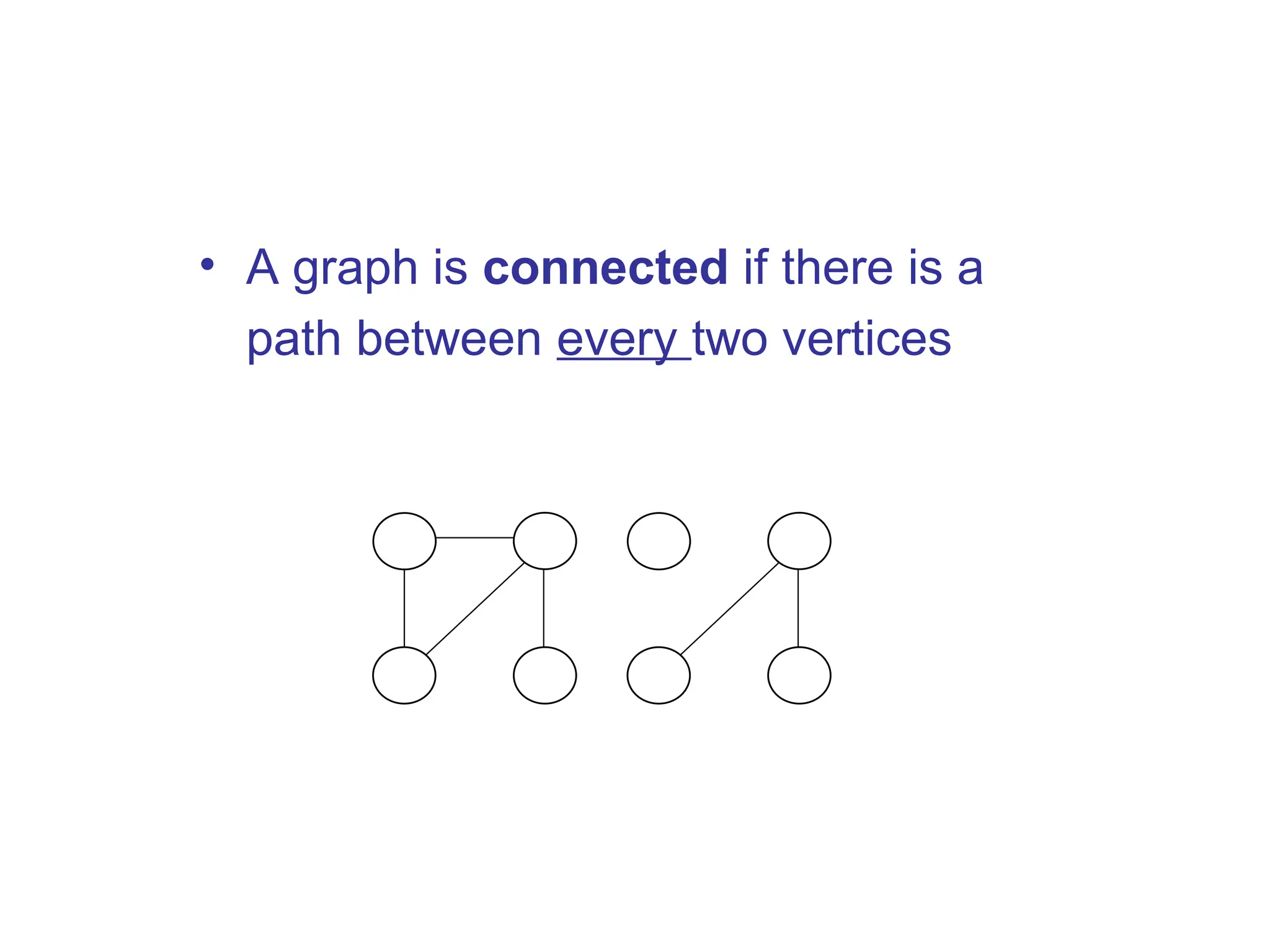
6 • A graphis connected if there is a path between every two vertices 1 2 3 4 Connected 1 2 3 4 Not connected
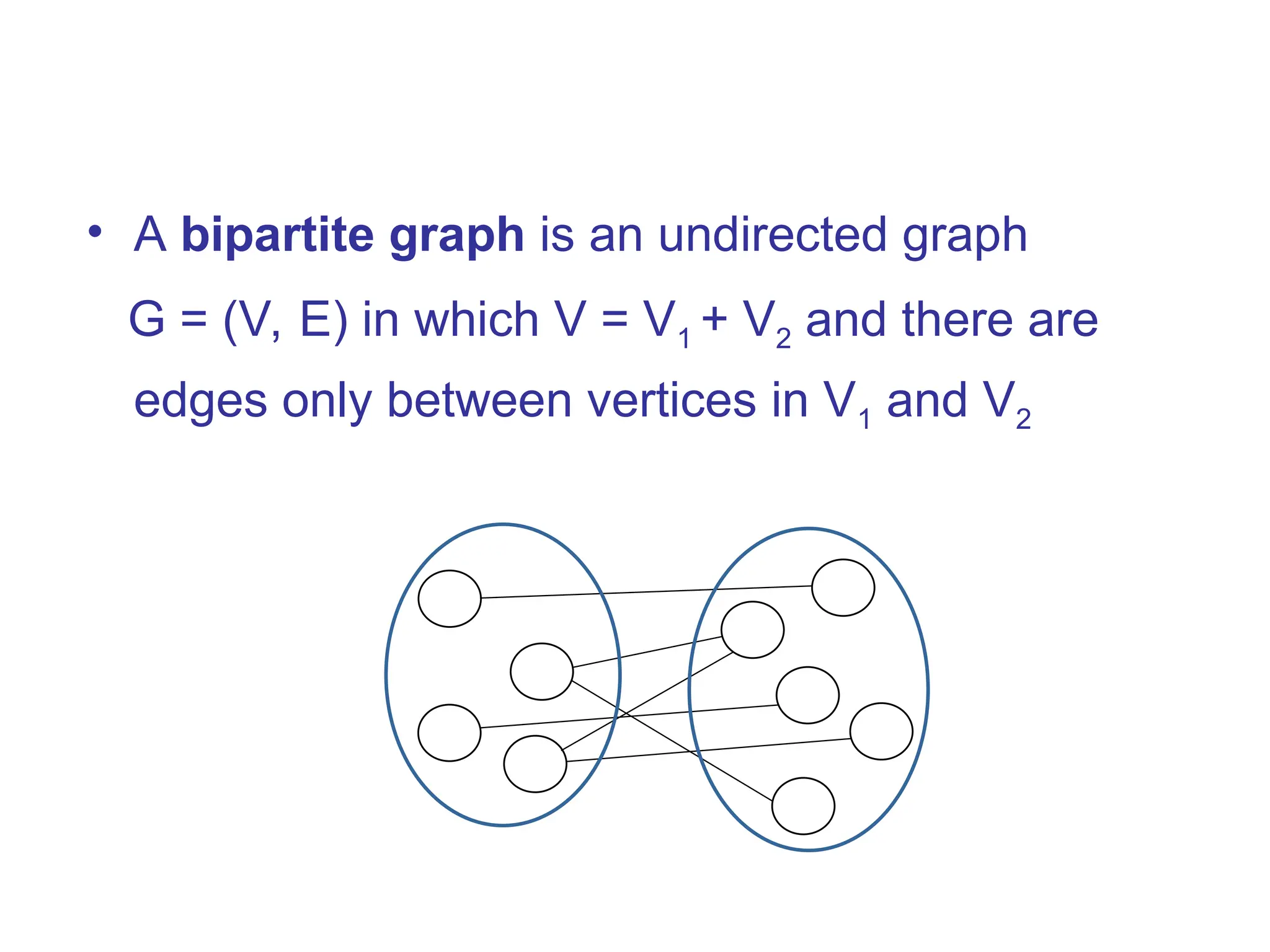
• A bipartitegraph is an undirected graph G = (V, E) in which V = V1 + V2 and there are edges only between vertices in V1 and V2 1 2 3 4 4 9 7 6 8 V1 V2
9.
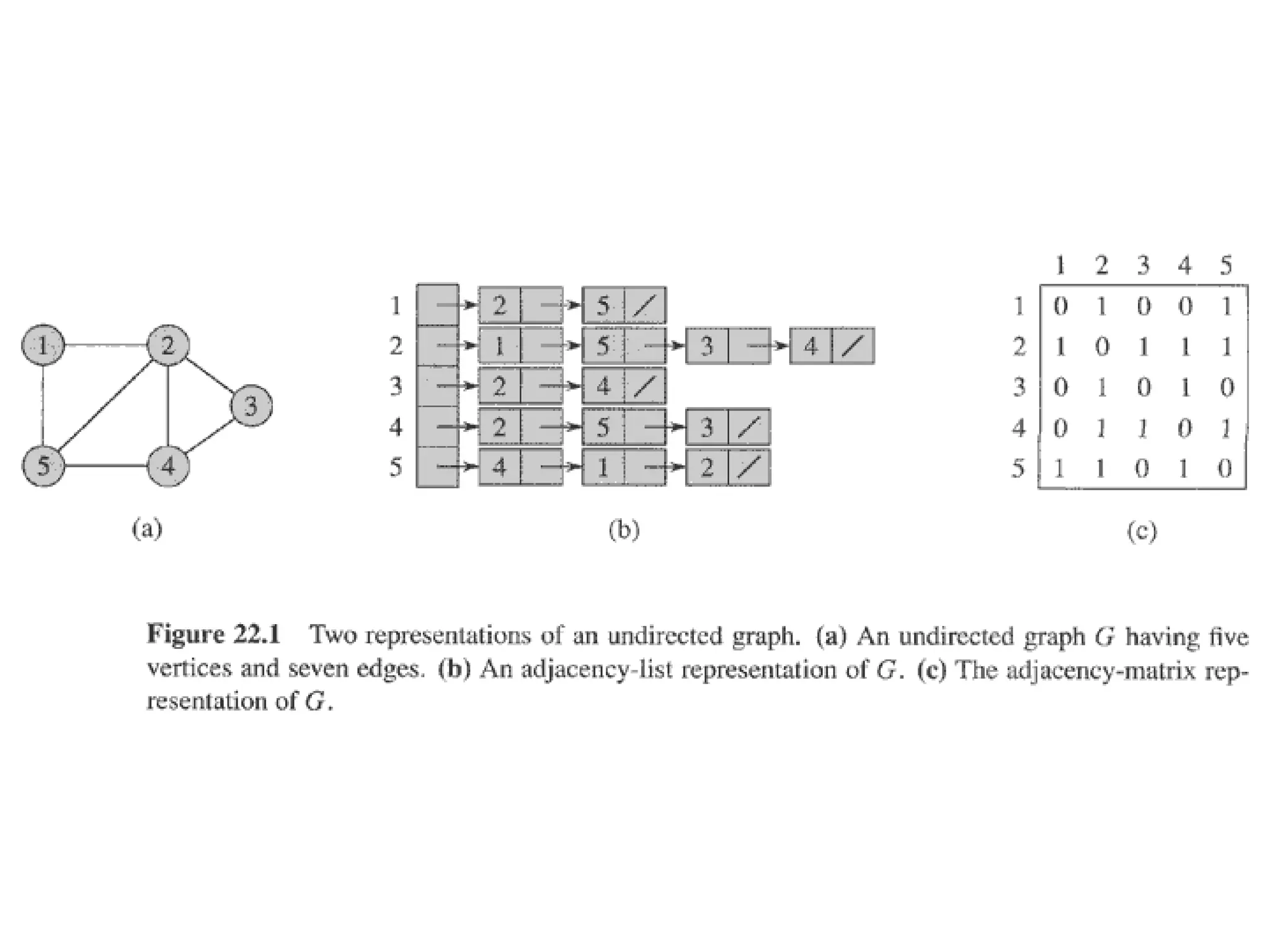
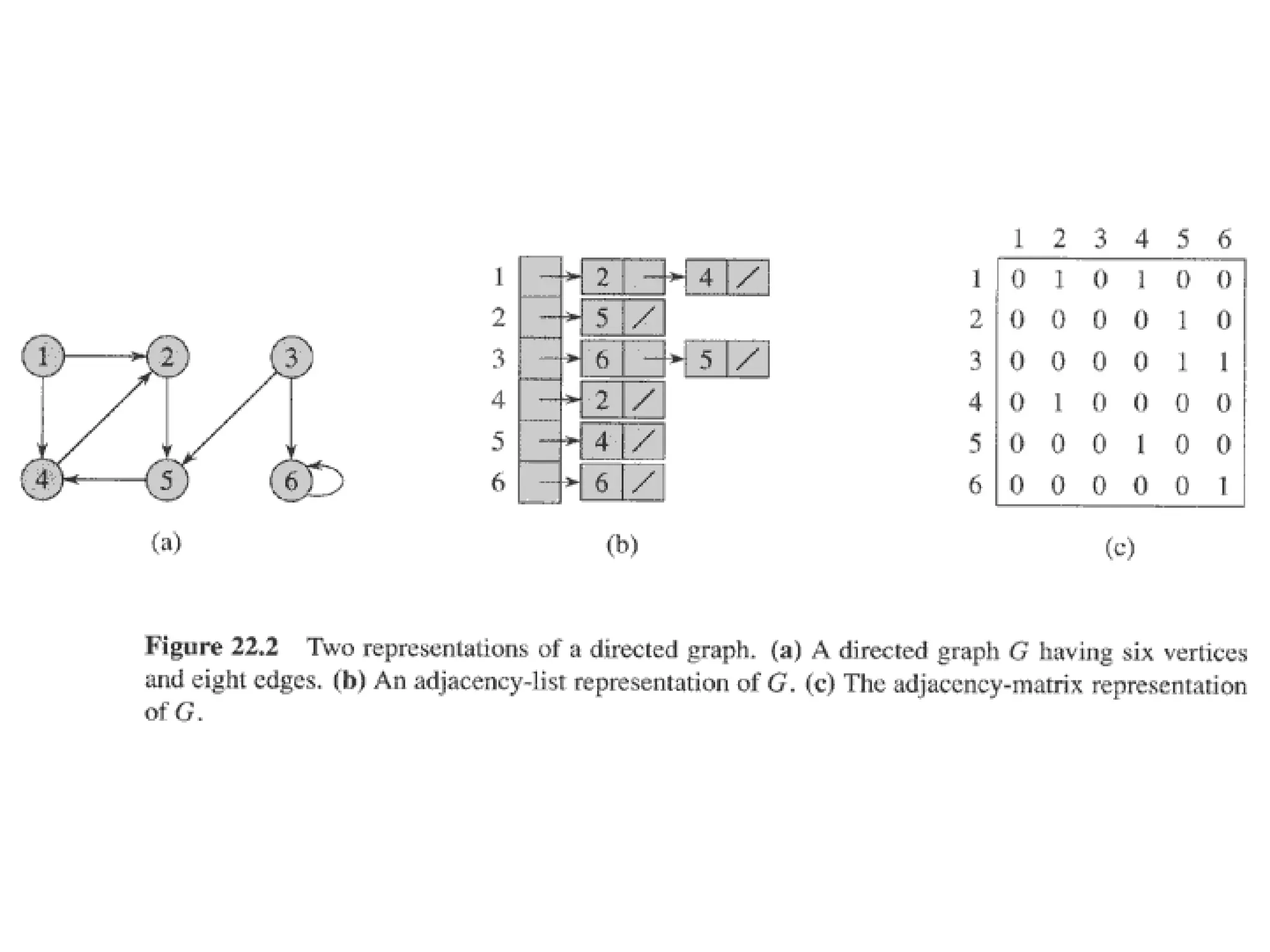
Graph Representation • Adjacencylist representation of G = (V, E) – An array of V lists, one for each vertex in V – Each list Adj[u] contains all the vertices v such that there is an edge between u and v • Adj[u] contains the vertices adjacent to u (in arbitrary order) – Can be used for both directed and undirected graphs 1 2 5 4 3 2 5 / 1 5 3 4 / 1 2 3 4 5 2 4 2 5 3 / 4 1 2 Undirected graph
10.
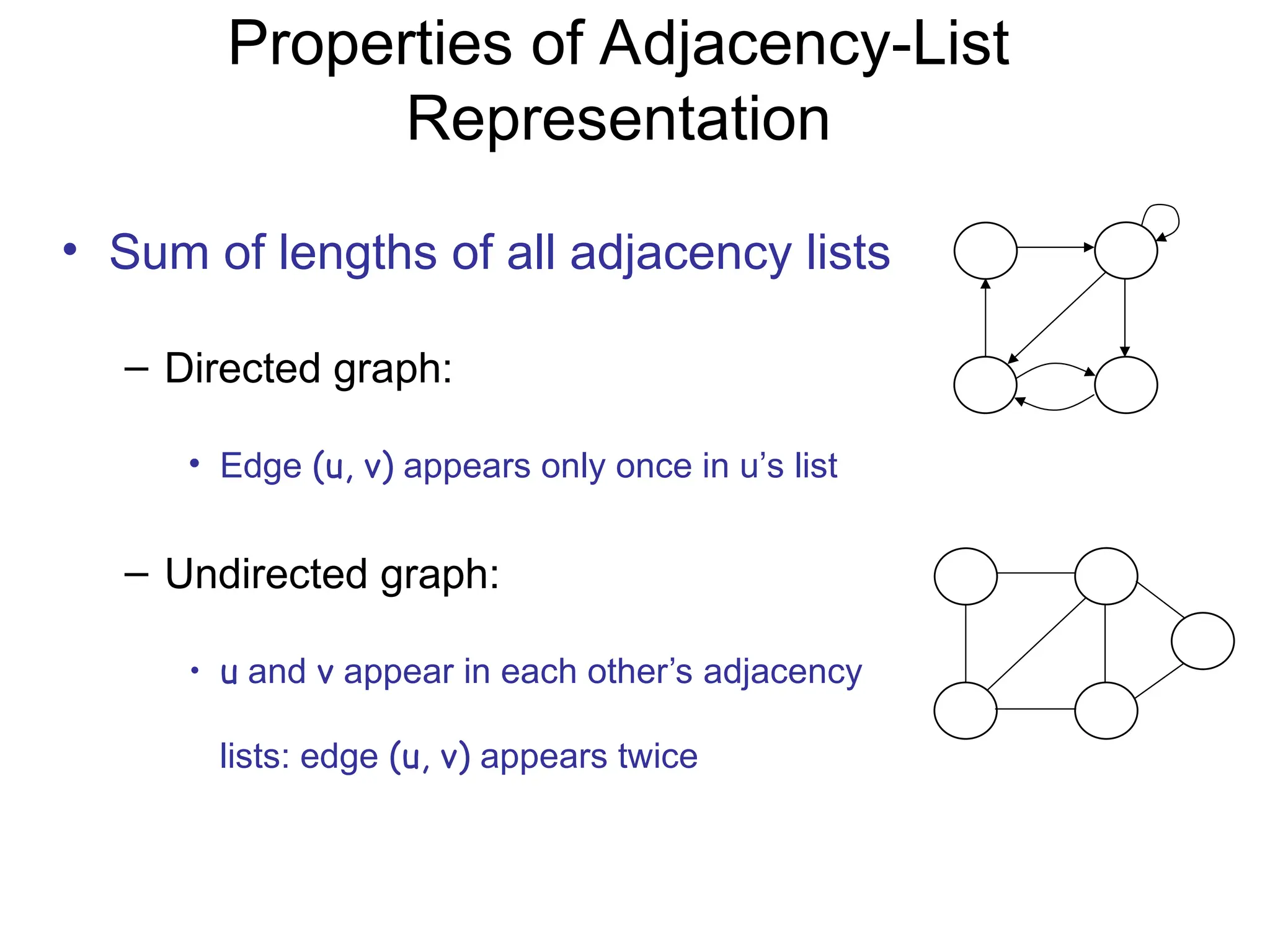
Properties of Adjacency-List Representation •Sum of lengths of all adjacency lists – Directed graph: • Edge (u, v) appears only once in u’s list – Undirected graph: • u and v appear in each other’s adjacency lists: edge (u, v) appears twice 1 2 5 4 3 Undirected graph 1 2 3 4 Directed graph E 2 E
11.
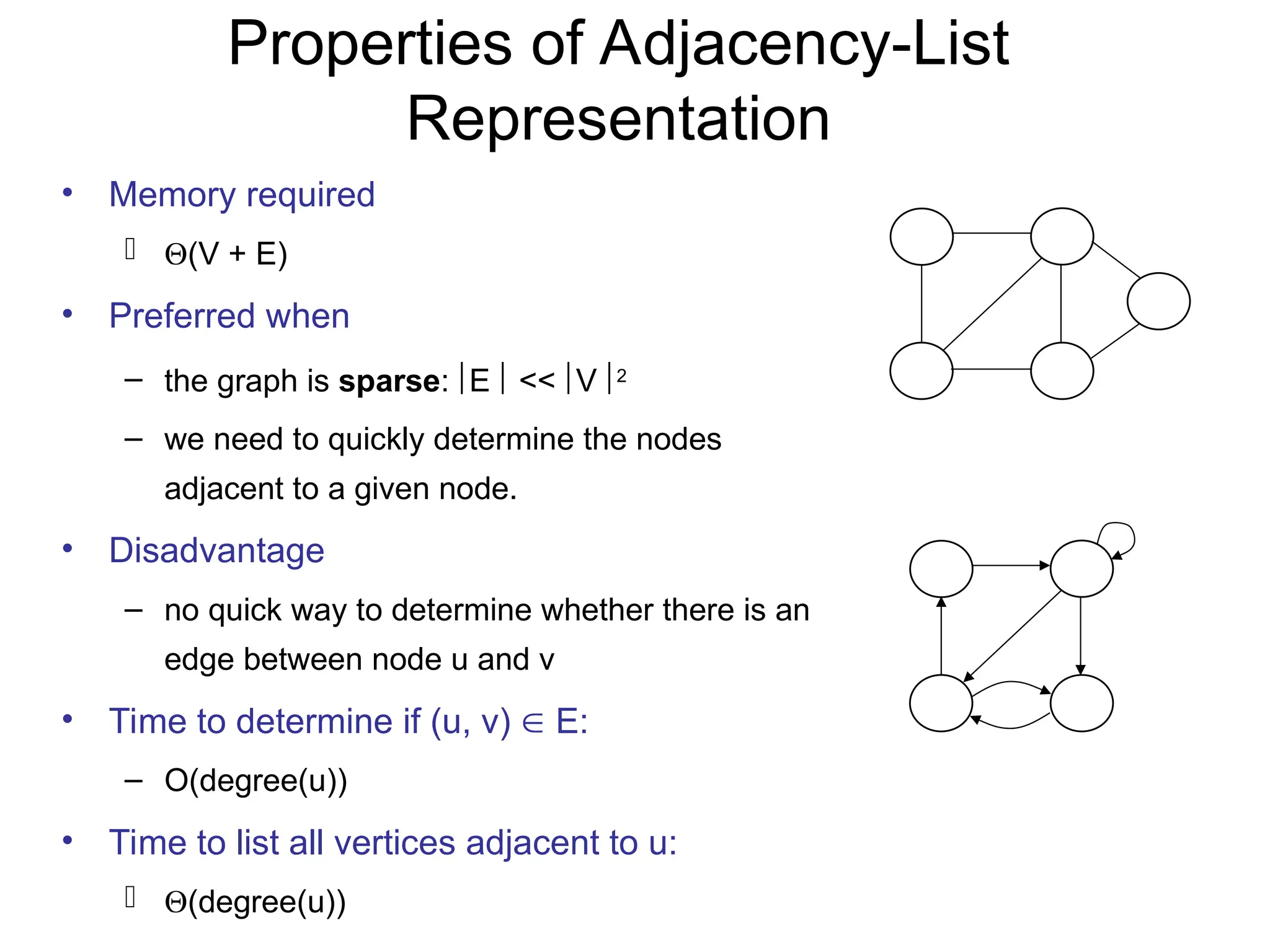
Properties of Adjacency-List Representation •Memory required (V + E) • Preferred when – the graph is sparse: E << V 2 – we need to quickly determine the nodes adjacent to a given node. • Disadvantage – no quick way to determine whether there is an edge between node u and v • Time to determine if (u, v) E: – O(degree(u)) • Time to list all vertices adjacent to u: (degree(u)) 1 2 5 4 3 Undirected graph 1 2 3 4 Directed graph
12.
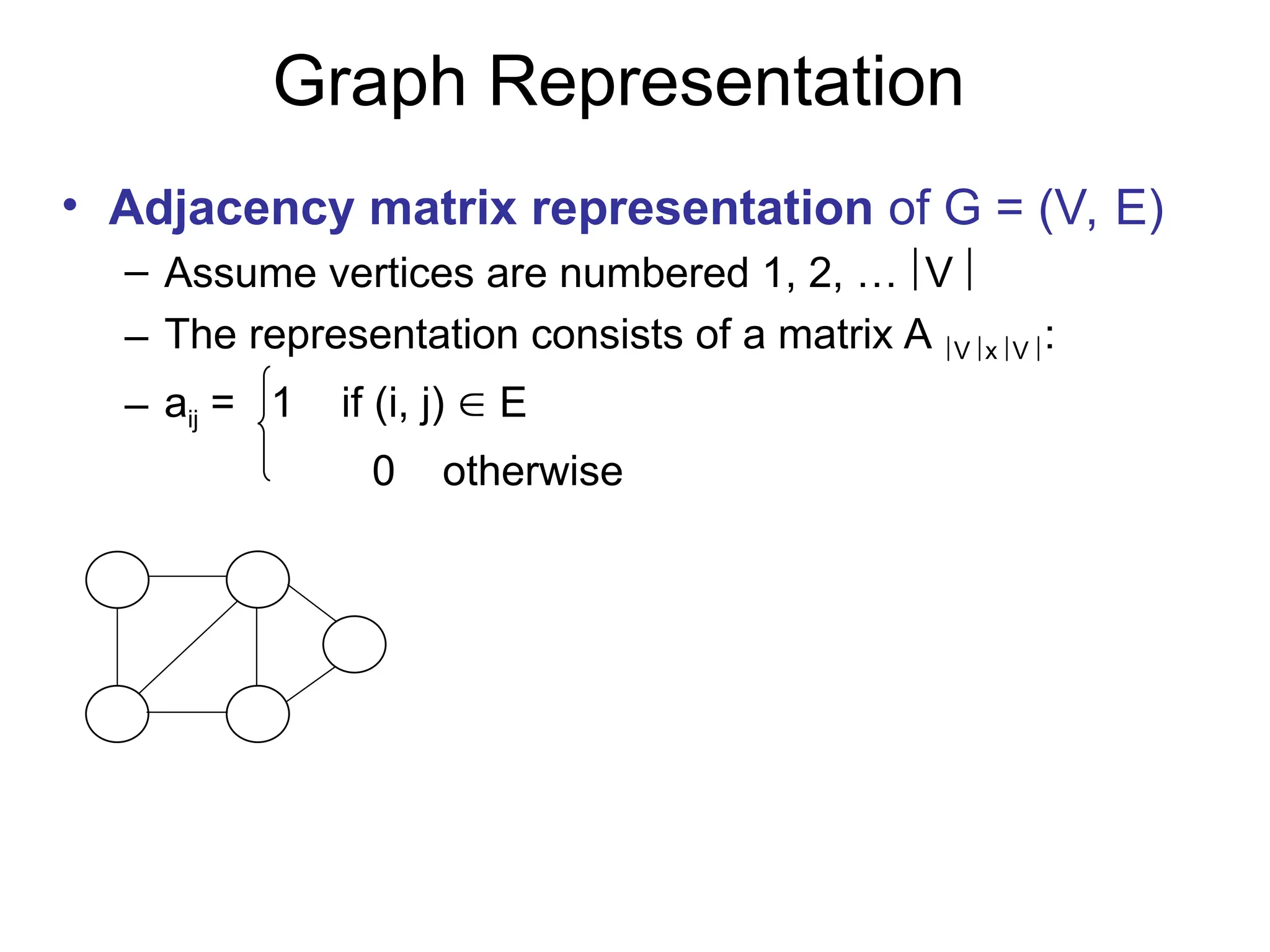
Graph Representation • Adjacencymatrix representation of G = (V, E) – Assume vertices are numbered 1, 2, … V – The representation consists of a matrix A V x V : – aij = 1 if (i, j) E 0 otherwise 1 2 5 4 3 Undirected graph 1 2 3 4 5 1 2 3 4 5 0 1 1 0 0 1 1 1 1 0 1 1 0 0 0 1 1 1 0 0 1 1 1 0 0 For undirected graphs, matrix A is symmetric: aij = aji A = AT
13.
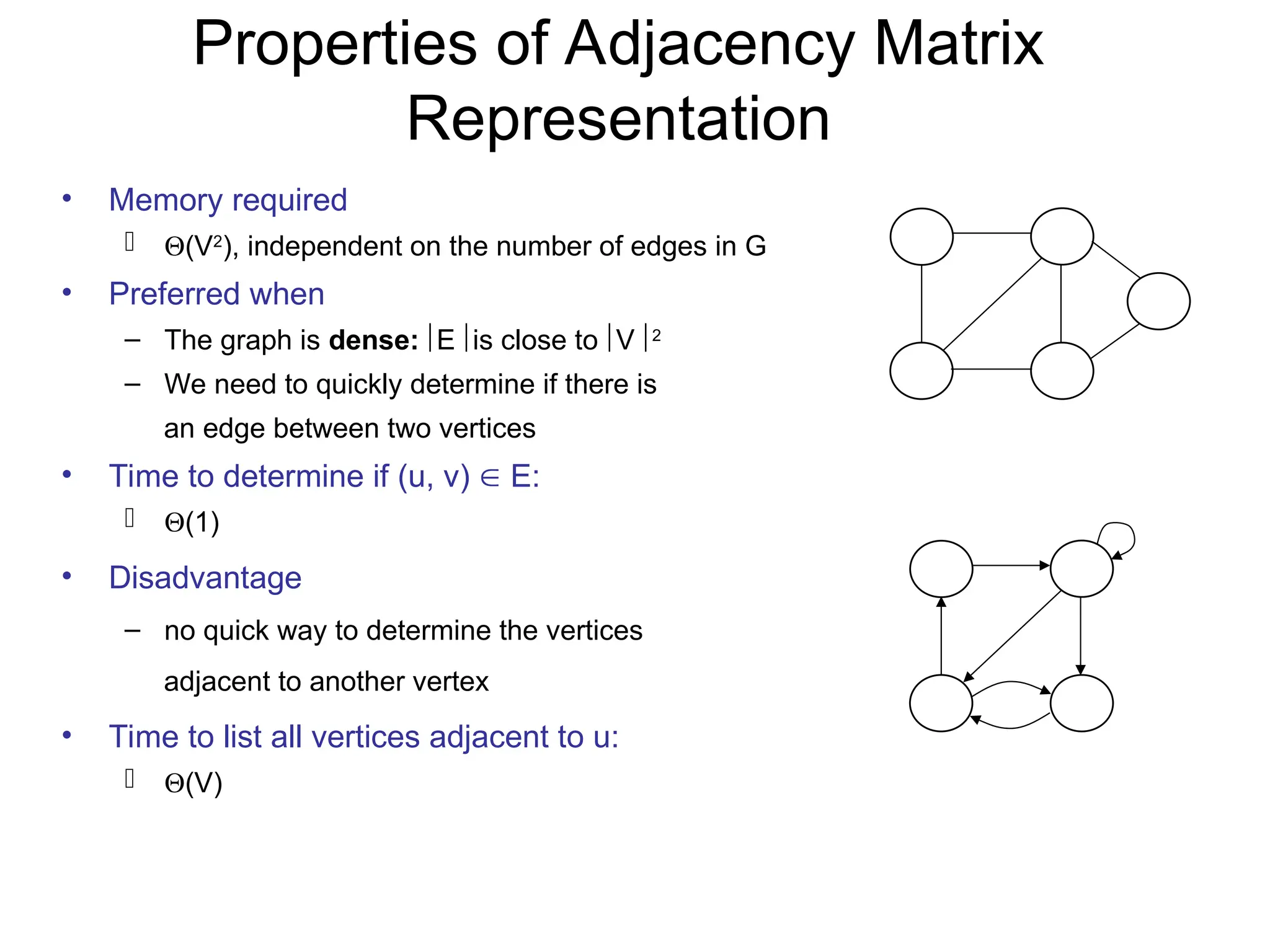
Properties of AdjacencyMatrix Representation • Memory required (V2 ), independent on the number of edges in G • Preferred when – The graph is dense: E is close to V 2 – We need to quickly determine if there is an edge between two vertices • Time to determine if (u, v) E: (1) • Disadvantage – no quick way to determine the vertices adjacent to another vertex • Time to list all vertices adjacent to u: (V) 1 2 5 4 3 Undirected graph 1 2 3 4 Directed graph
14.
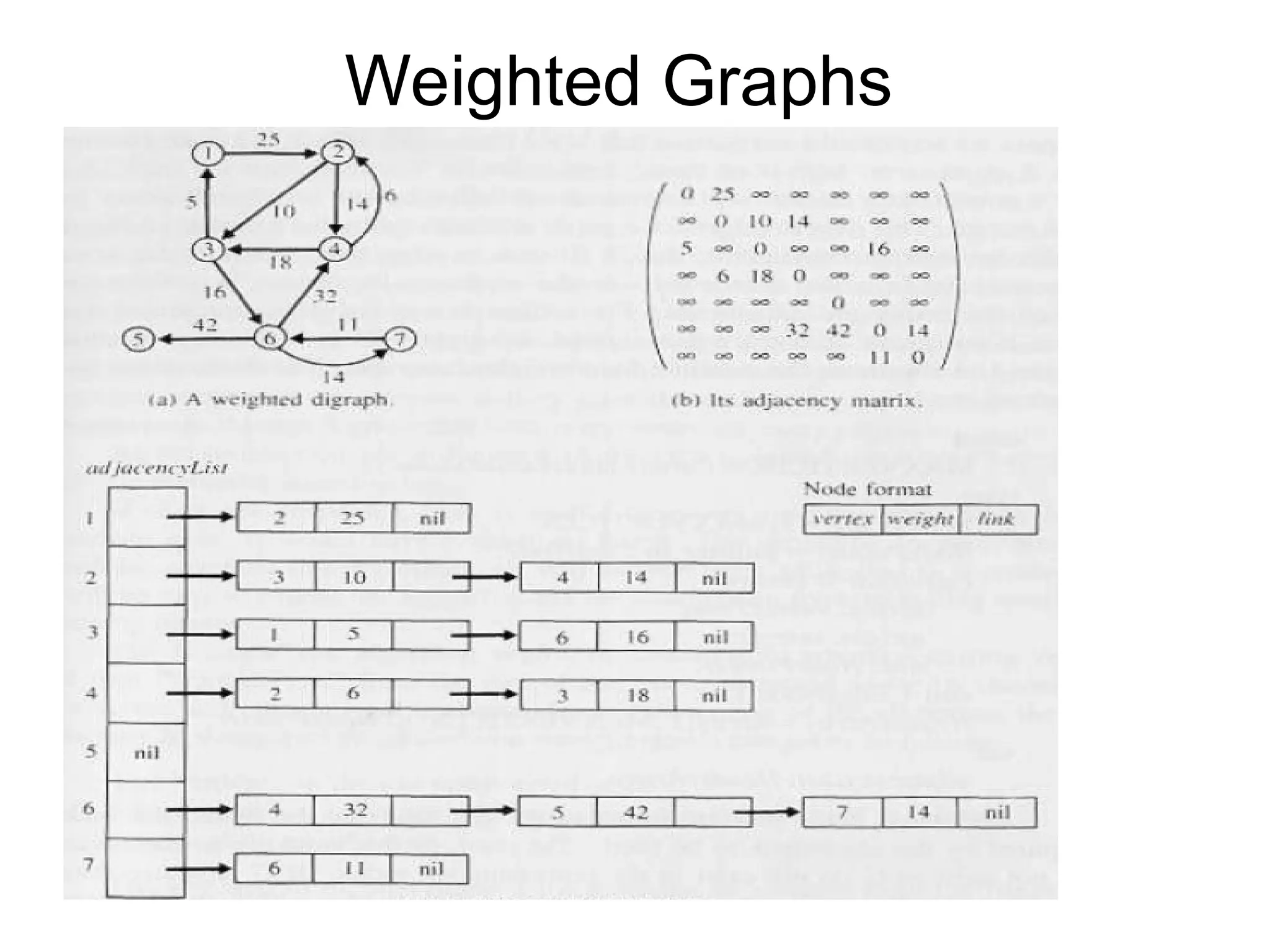
Weighted Graphs • Graphsfor which each edge has an associated weight w(u, v) w: E R, weight function • Storing the weights of a graph – Adjacency list: • Store w(u,v) along with vertex v in u’s adjacency list – Adjacency matrix: • Store w(u, v) at location (u, v) in the matrix
Graph Traversal • Graphtraversal is a systematic procedure for exploring a graph by visiting all of its vertices. • A traversal is efficient if it runs in linear time. • Breadth first search(BFS) traverse a connected component of given graph and find spanning tree. • BFS is used to solve following problems: i) Testing whether graph is connected. ii) Computing a spanning forest of graph. iii)Computing for every vertex in graph , path with minimum number of edges between start vertex and current vertex or reporting no such path exists. iv)Computing a cycle in graph or reporting no such cycle exists.
19.
• The breadth-first-searchprocedure BFS assumes that the input graph G = (V,E) is represented using adjacency lists. • It maintains several additional data structures with each vertex in the graph. • The color of each vertex u ϵ V is stored in the variable color[u], and the predecessor of u is stored in the variable pi[u]. • If u has no predecessor (e.g. u is s or u has not been discovered), then pi[u] = NIL. • The distance from the source s to vertex u computed by the algorithm is stored in d[u]. BFS(Breadth first search) BFS(Breadth first search)
20.
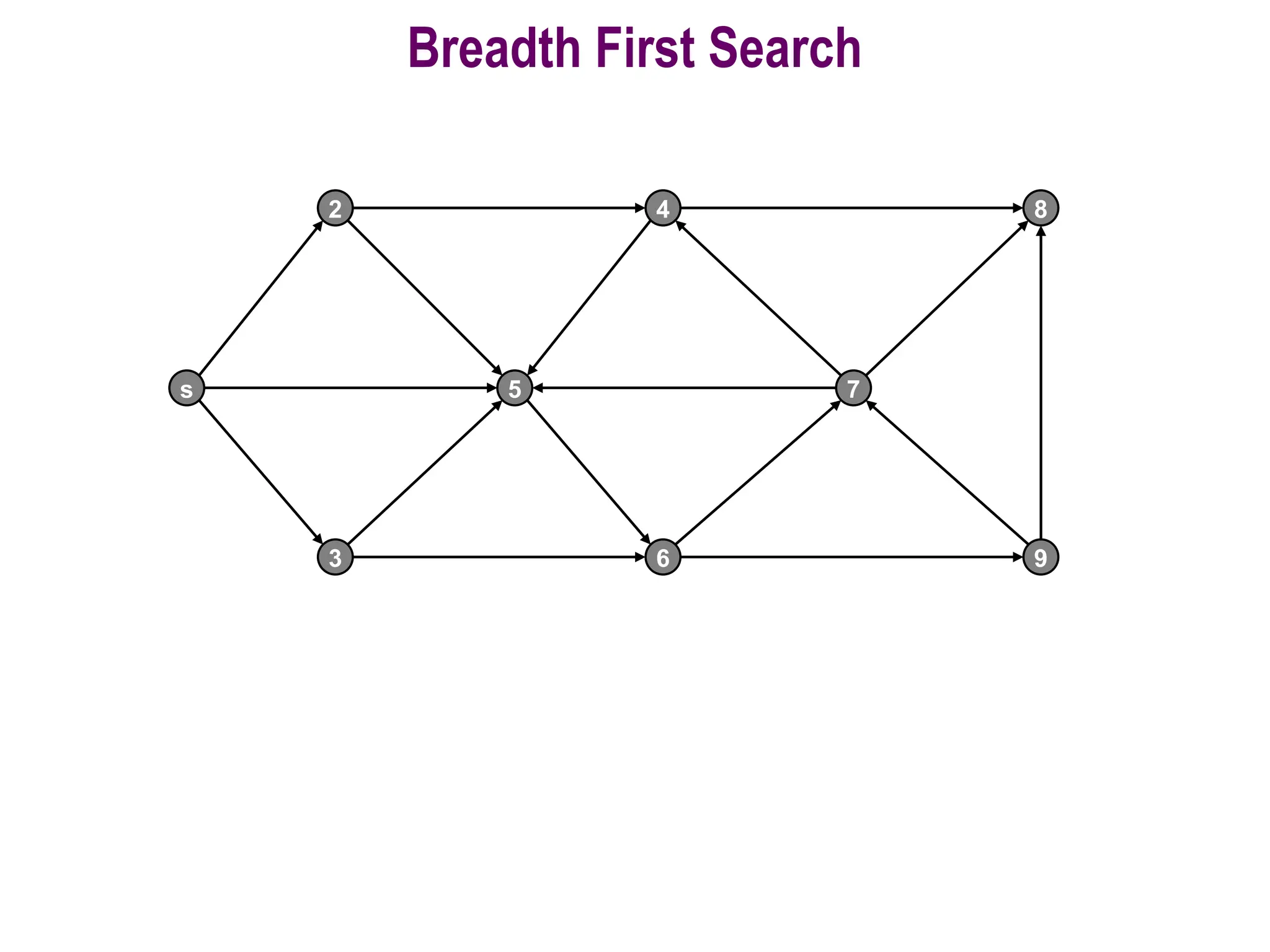
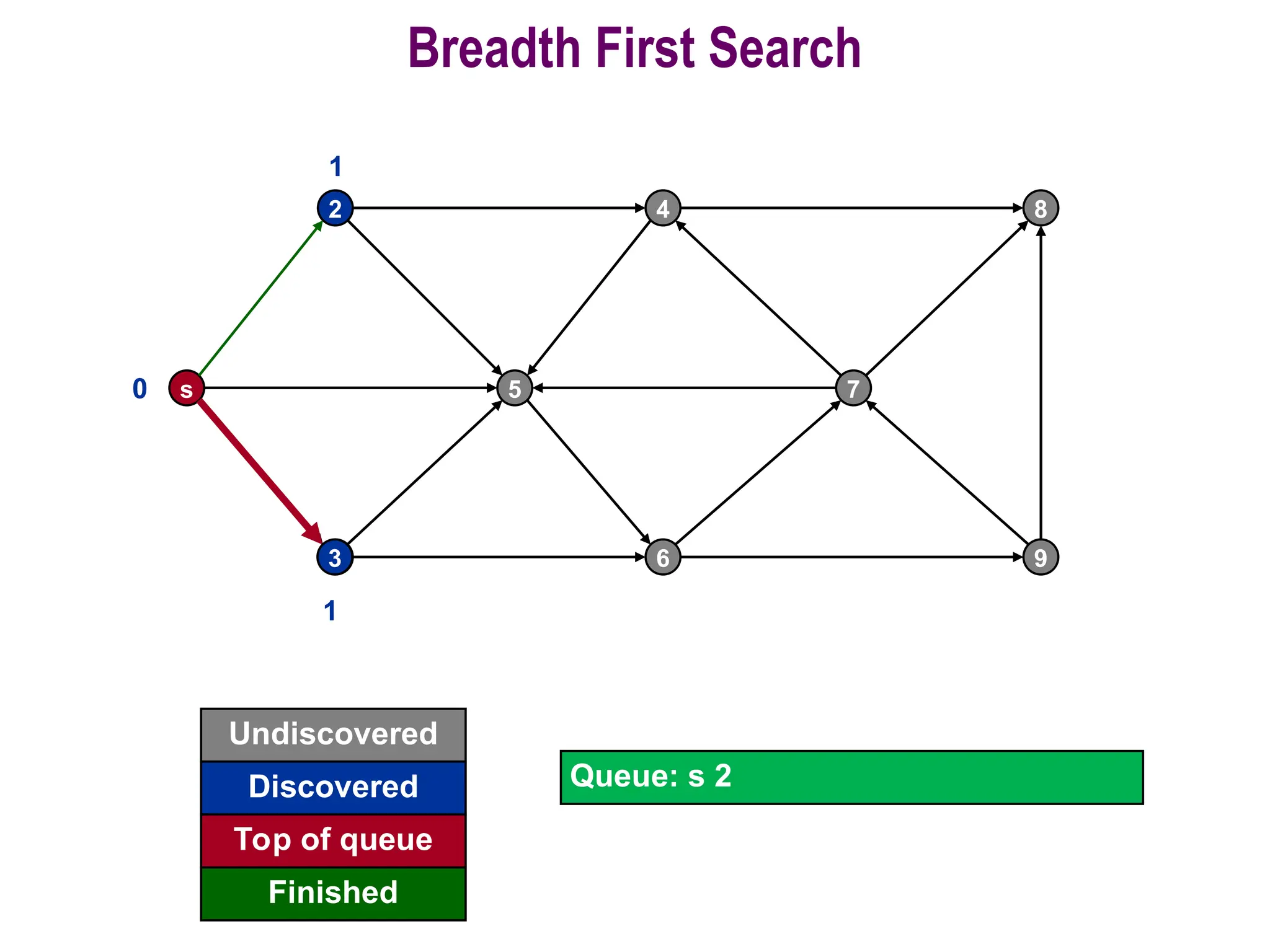
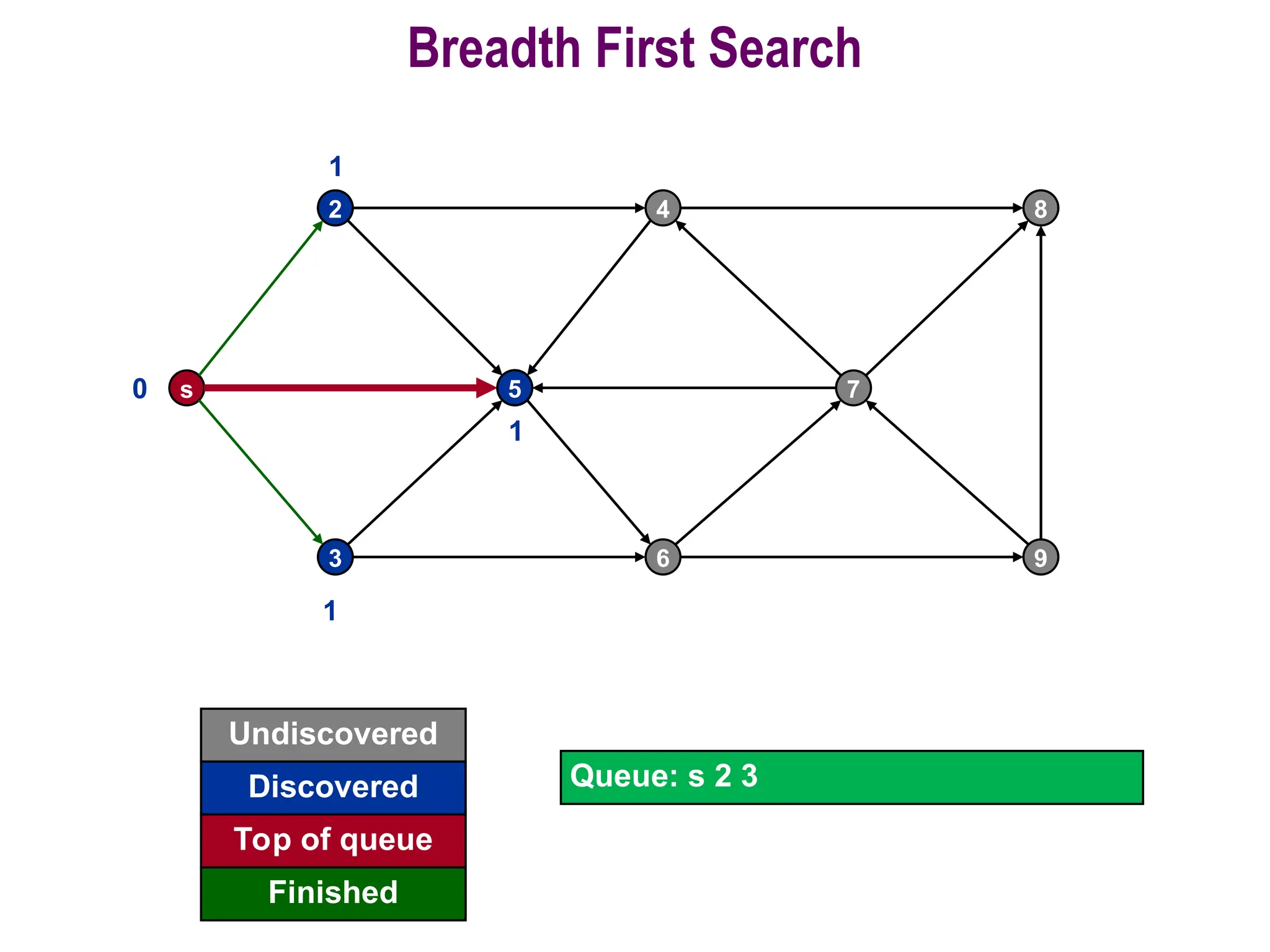
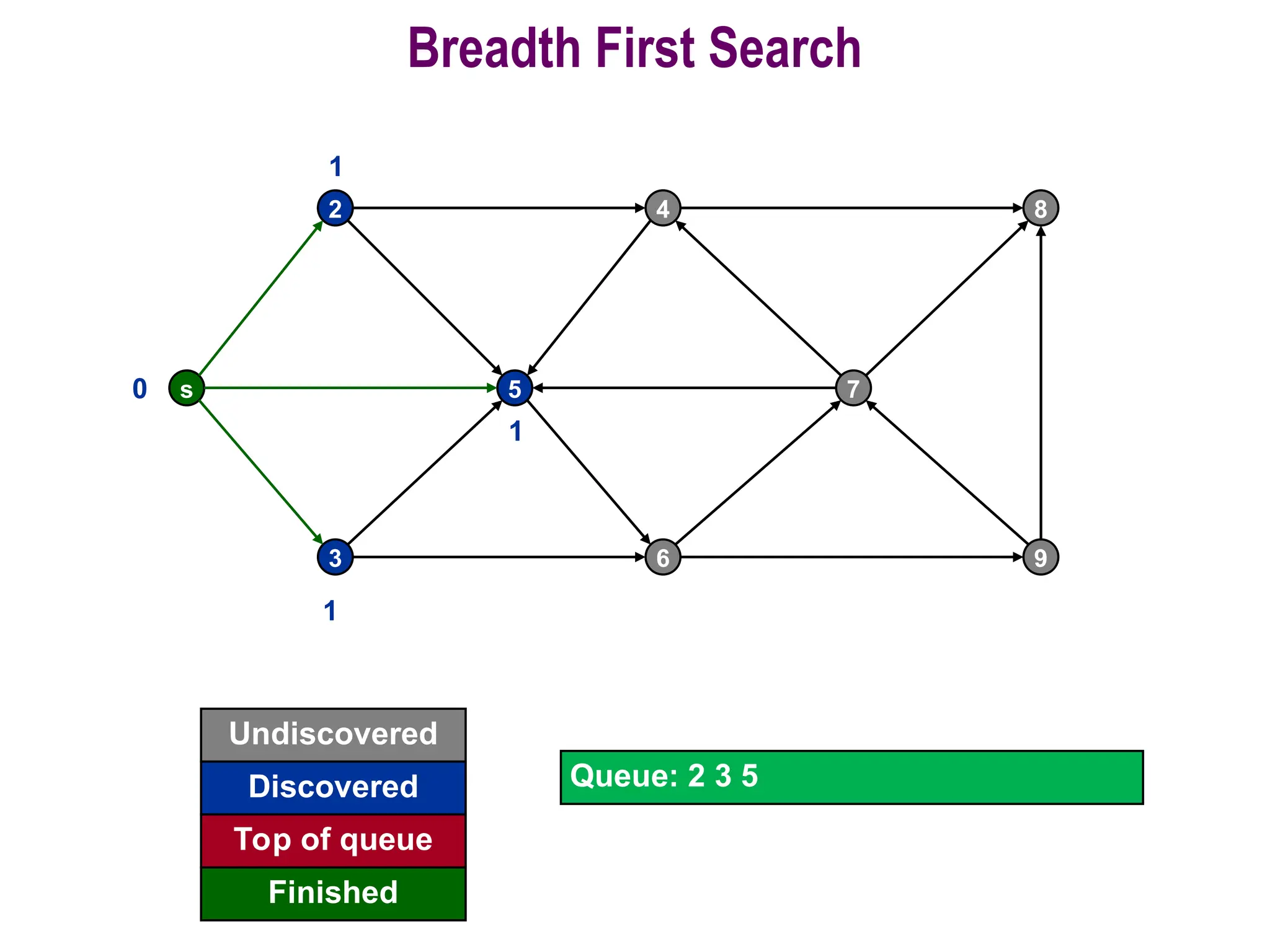
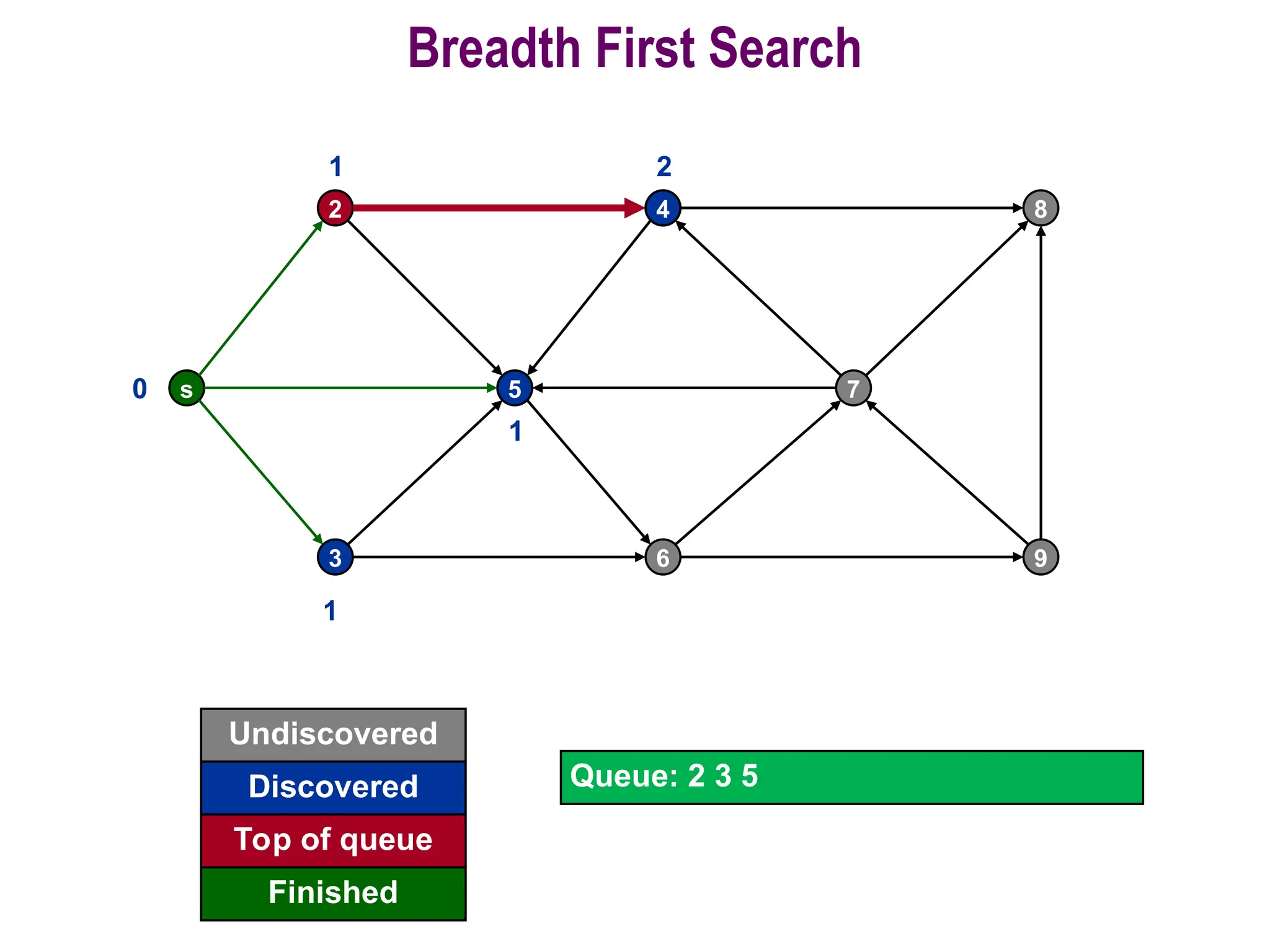
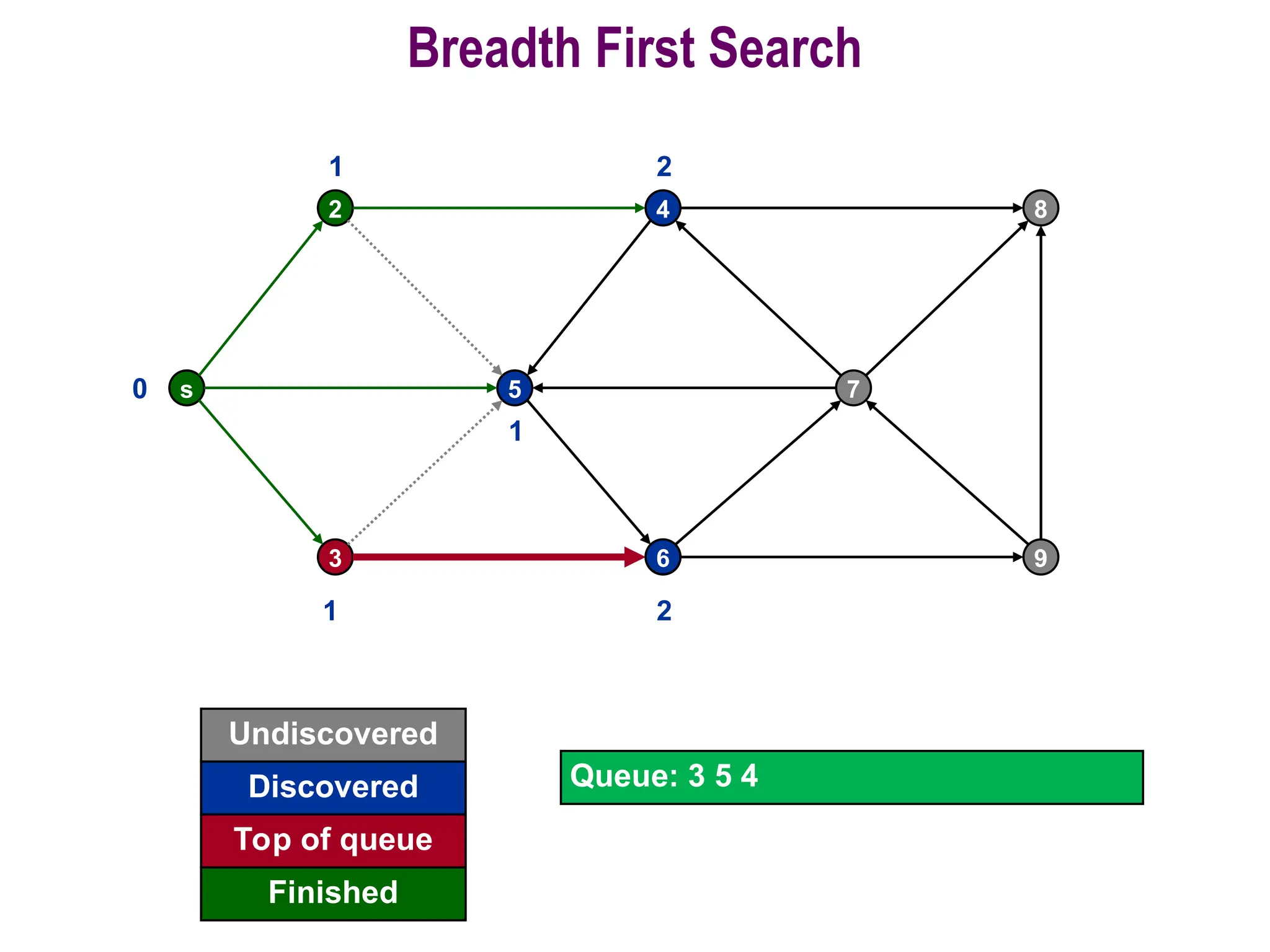
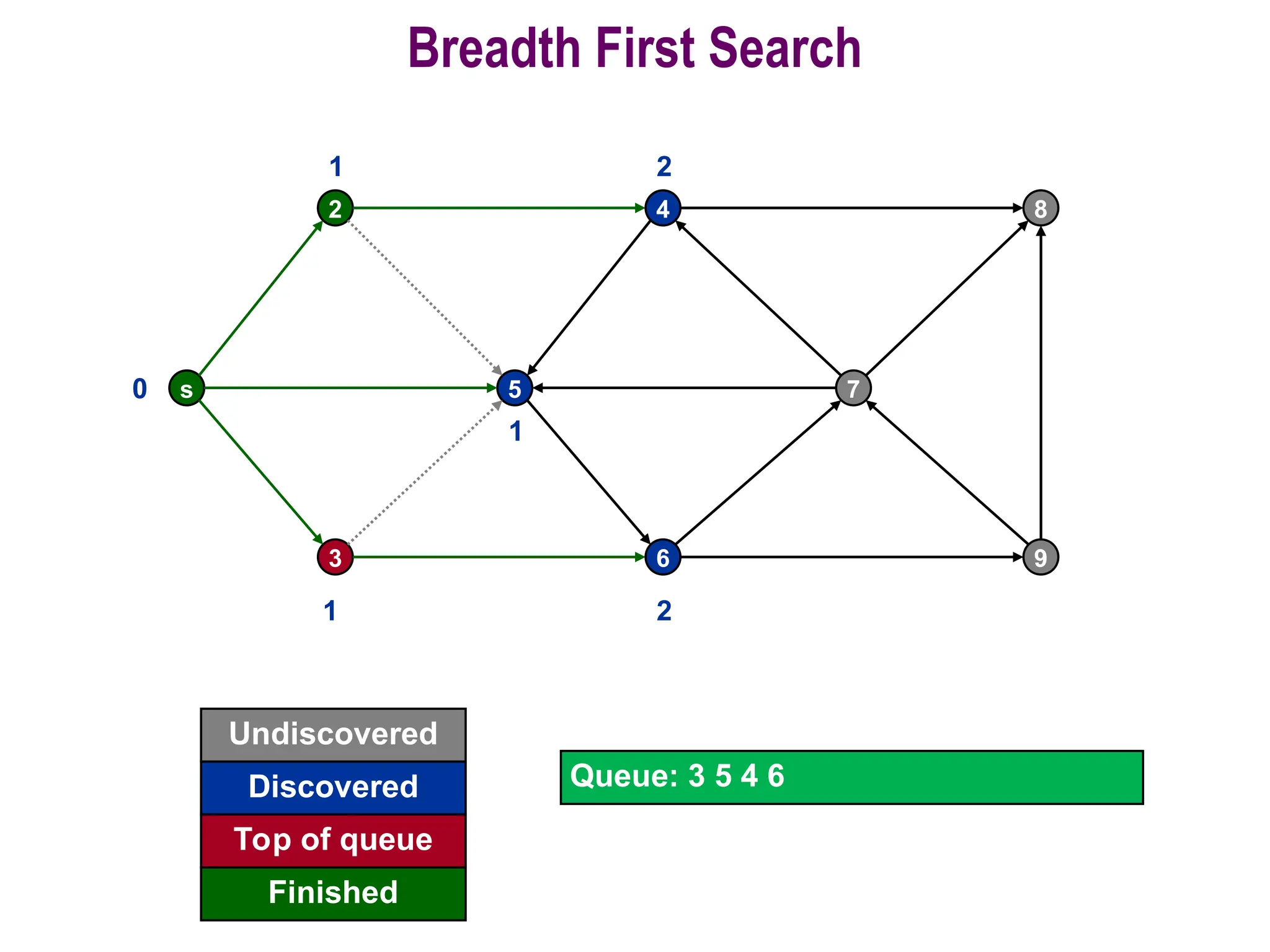
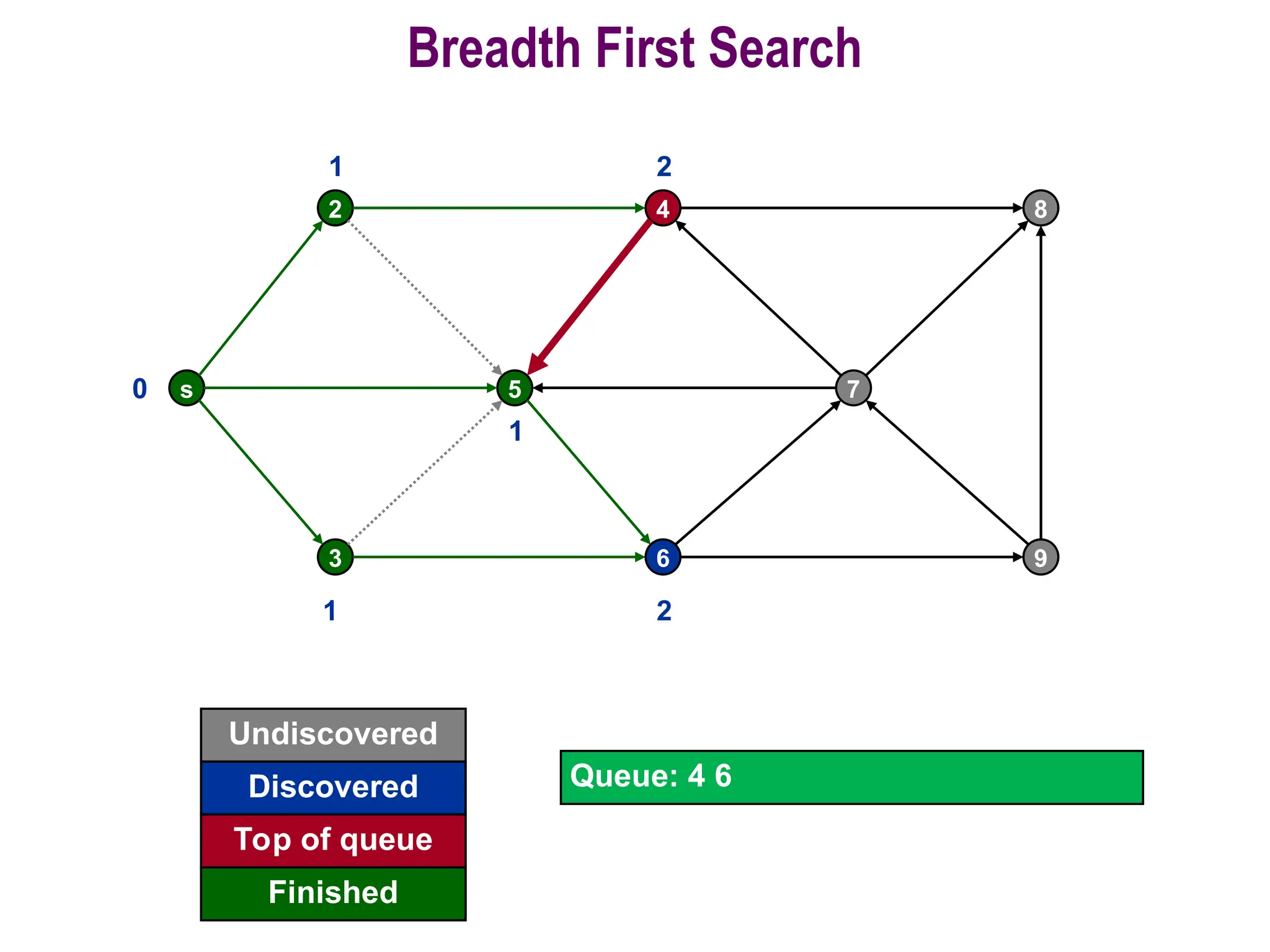
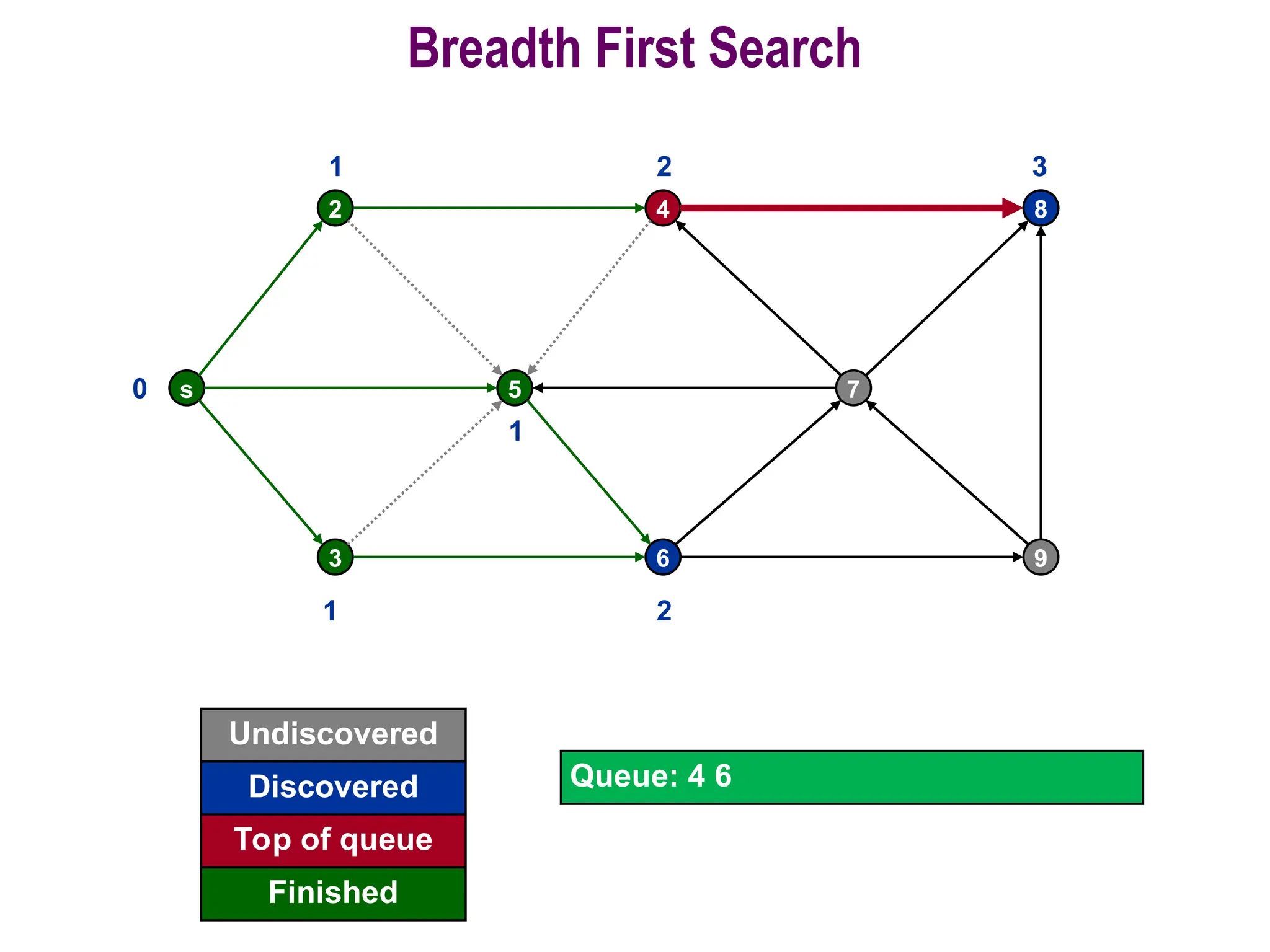
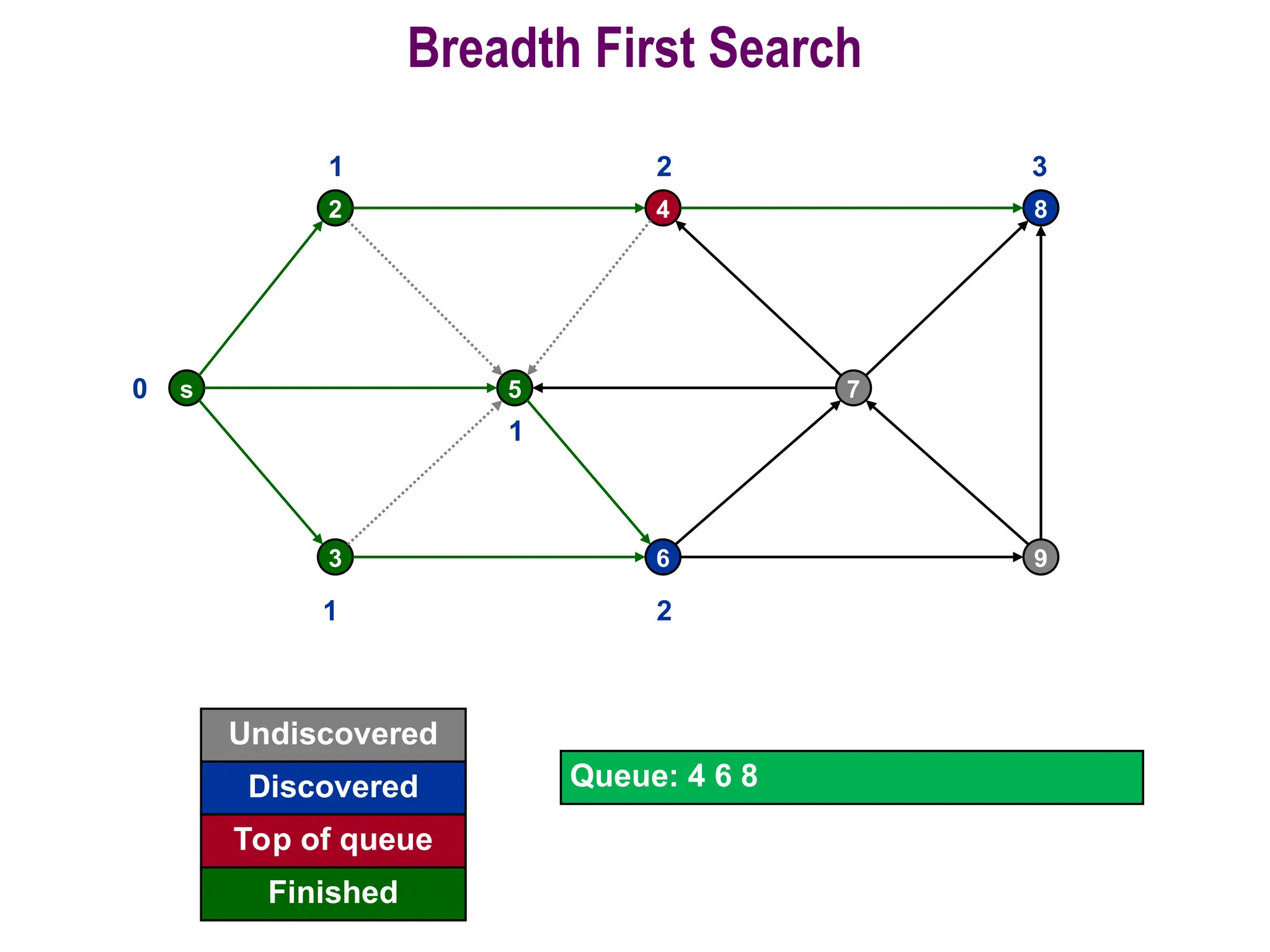
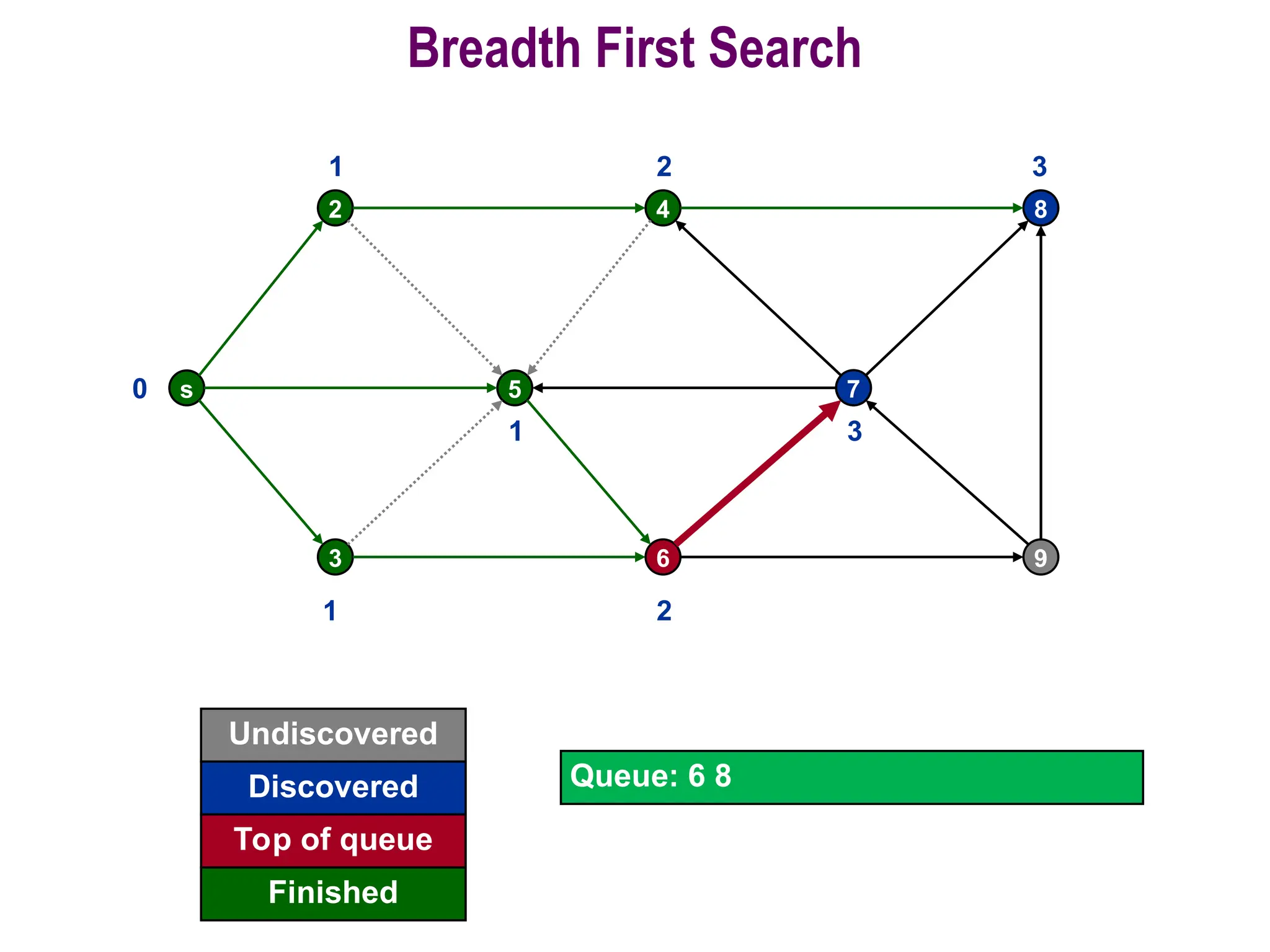
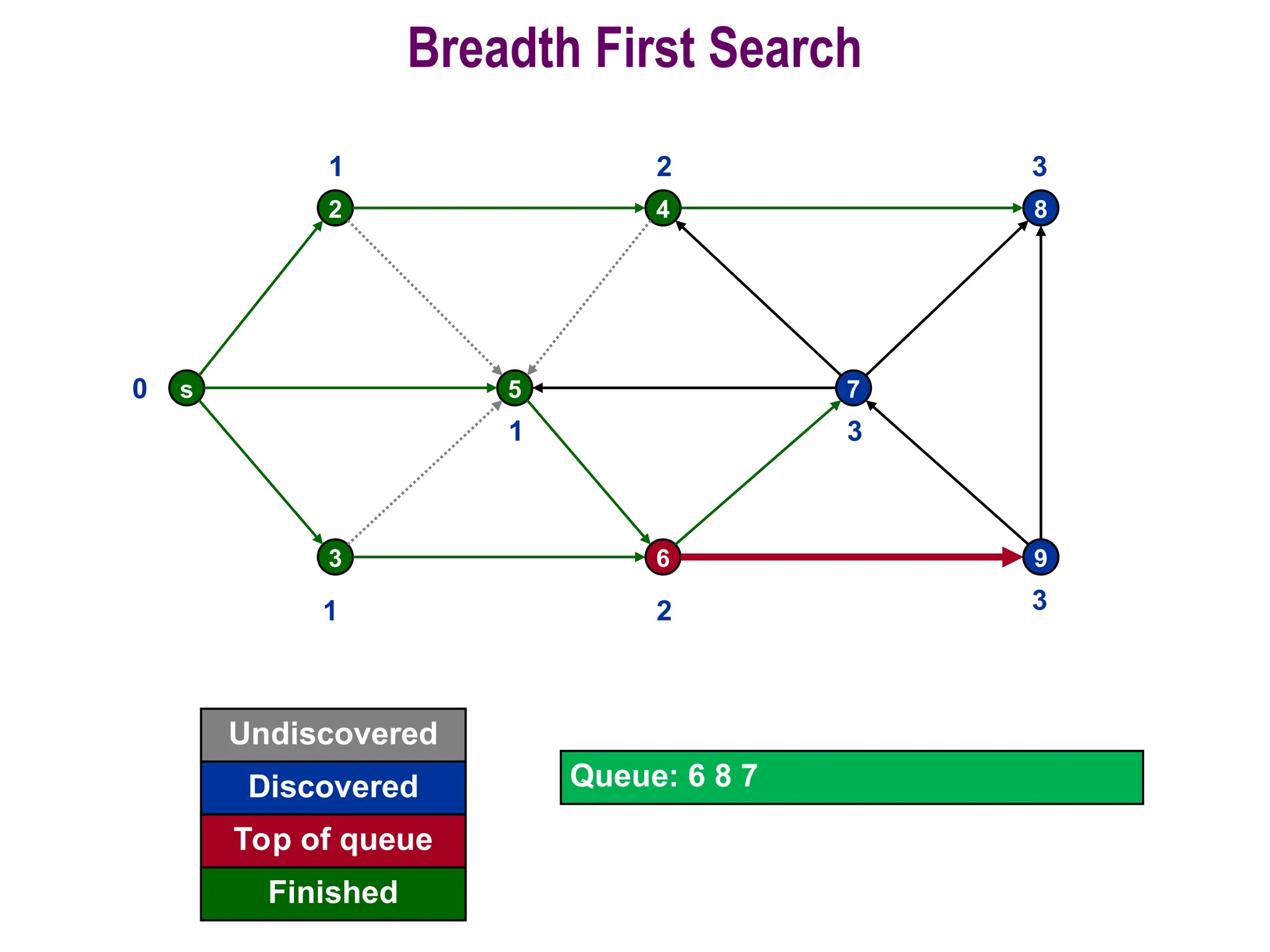
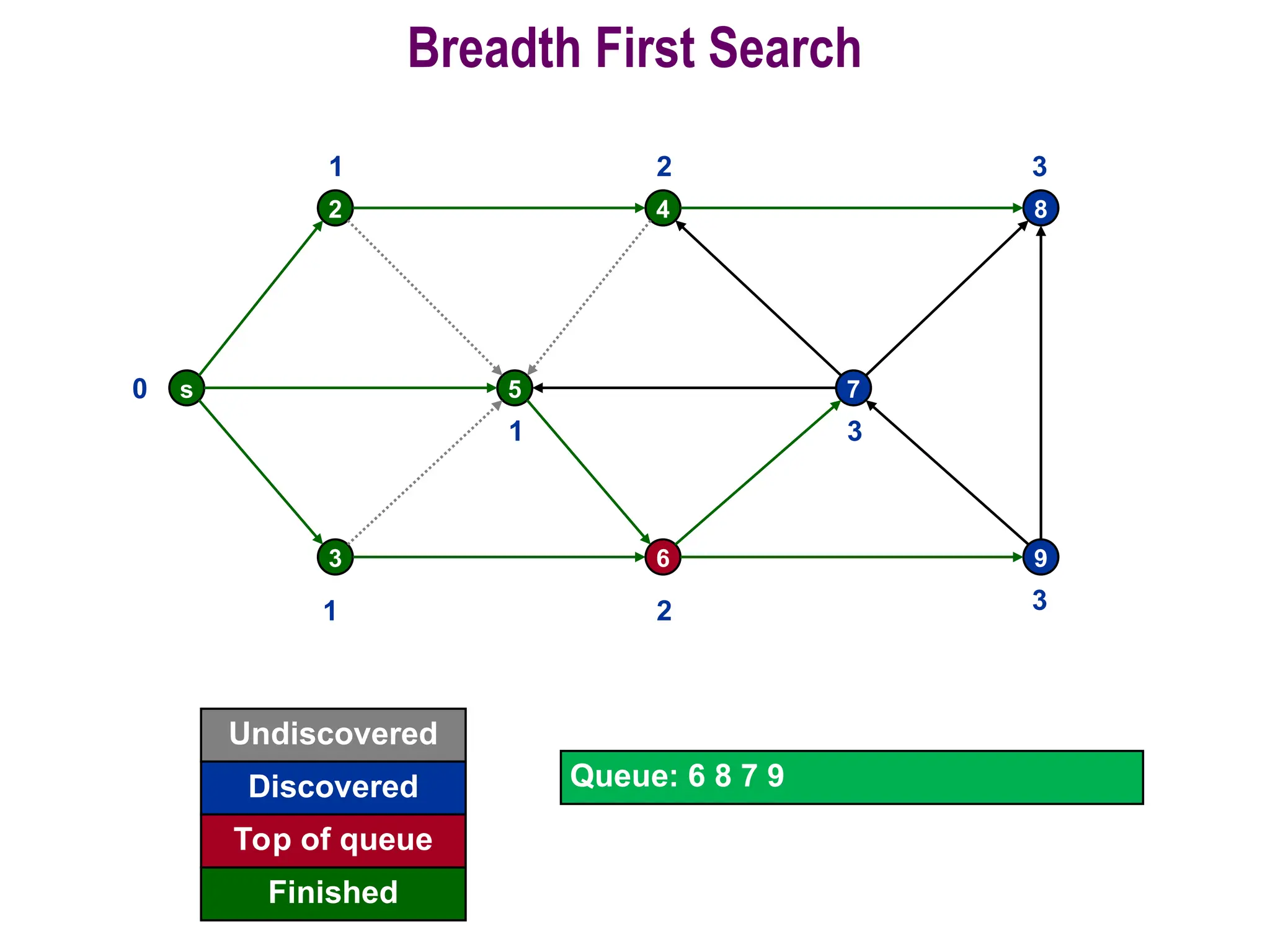
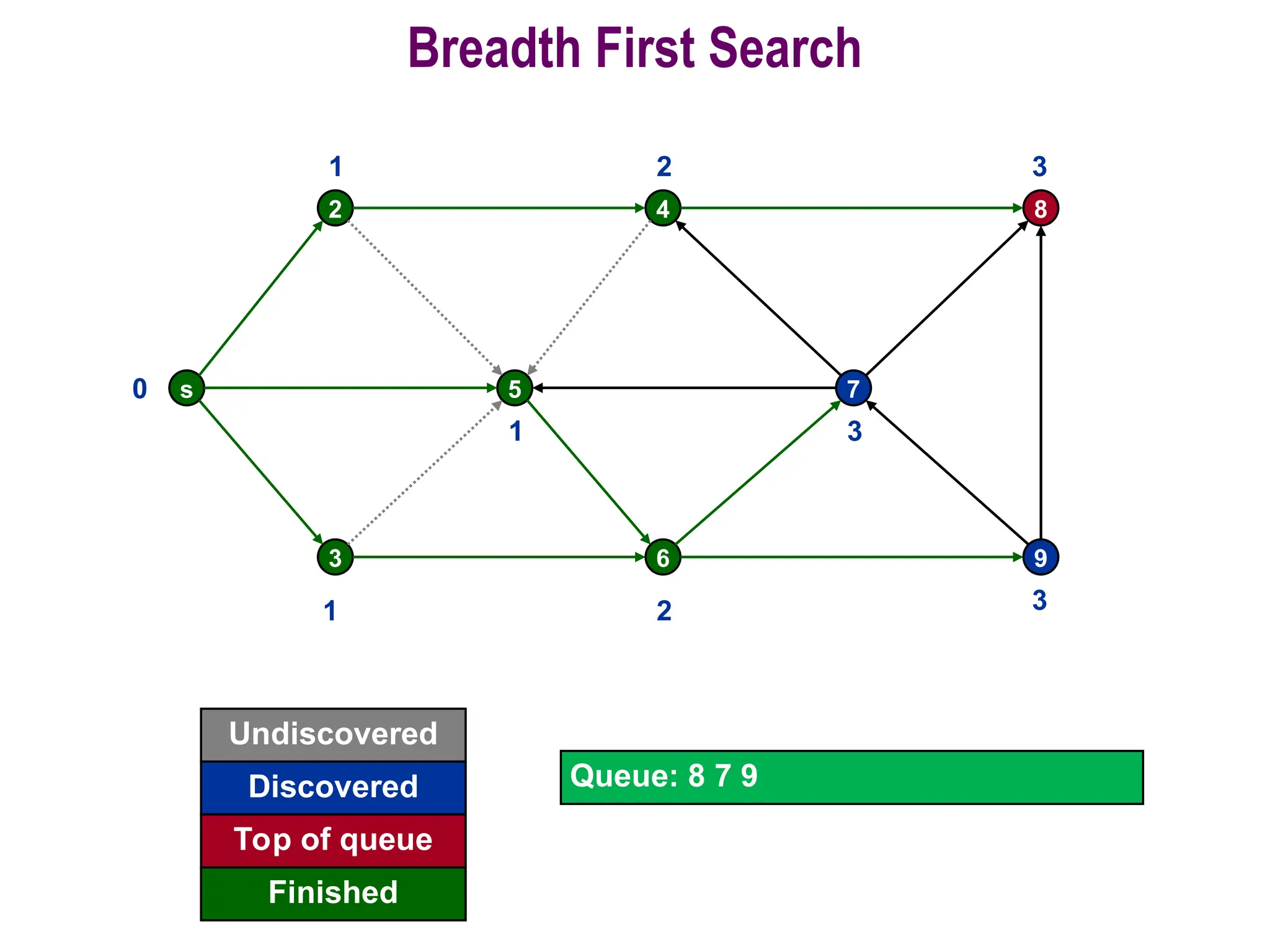
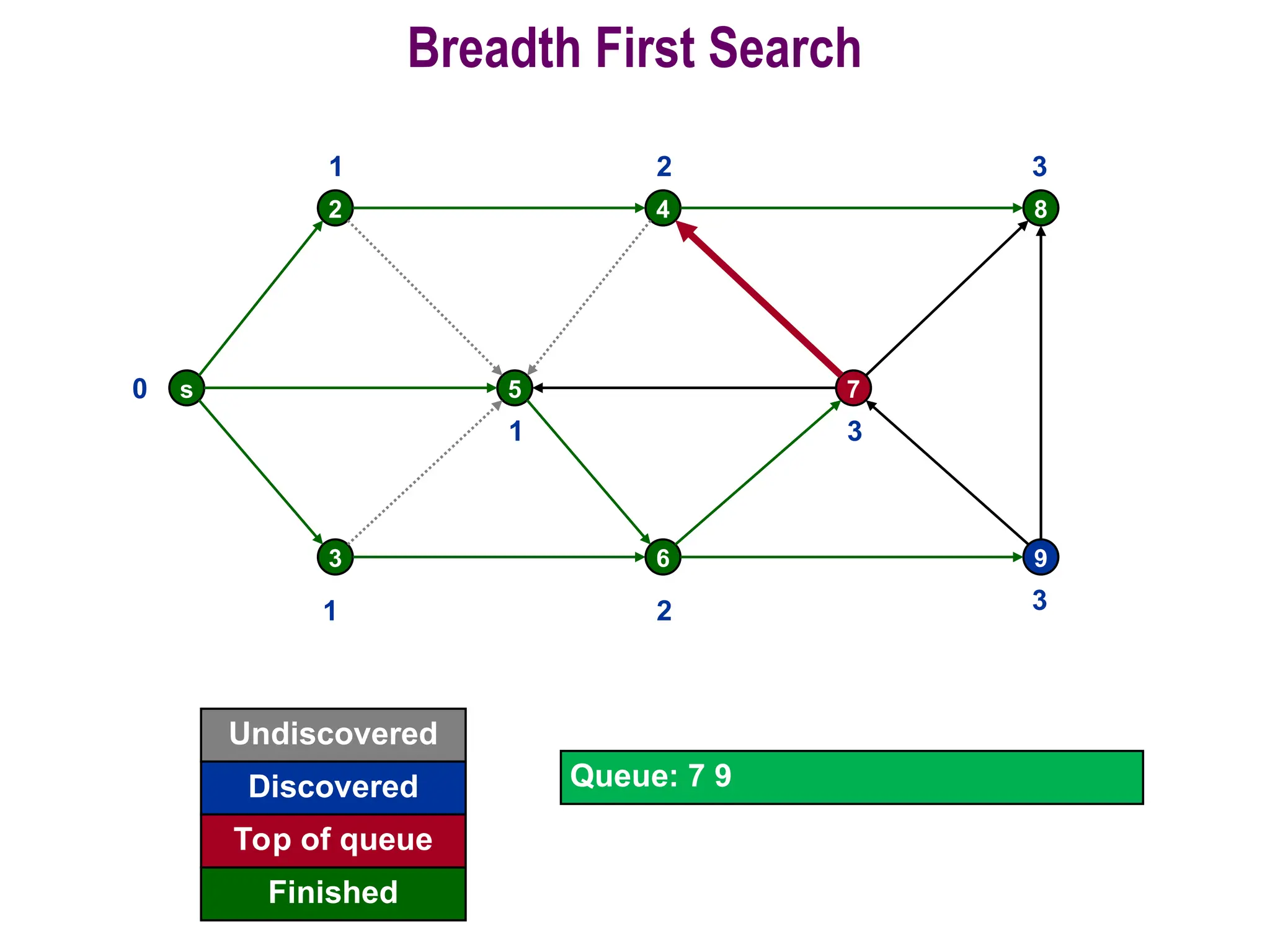
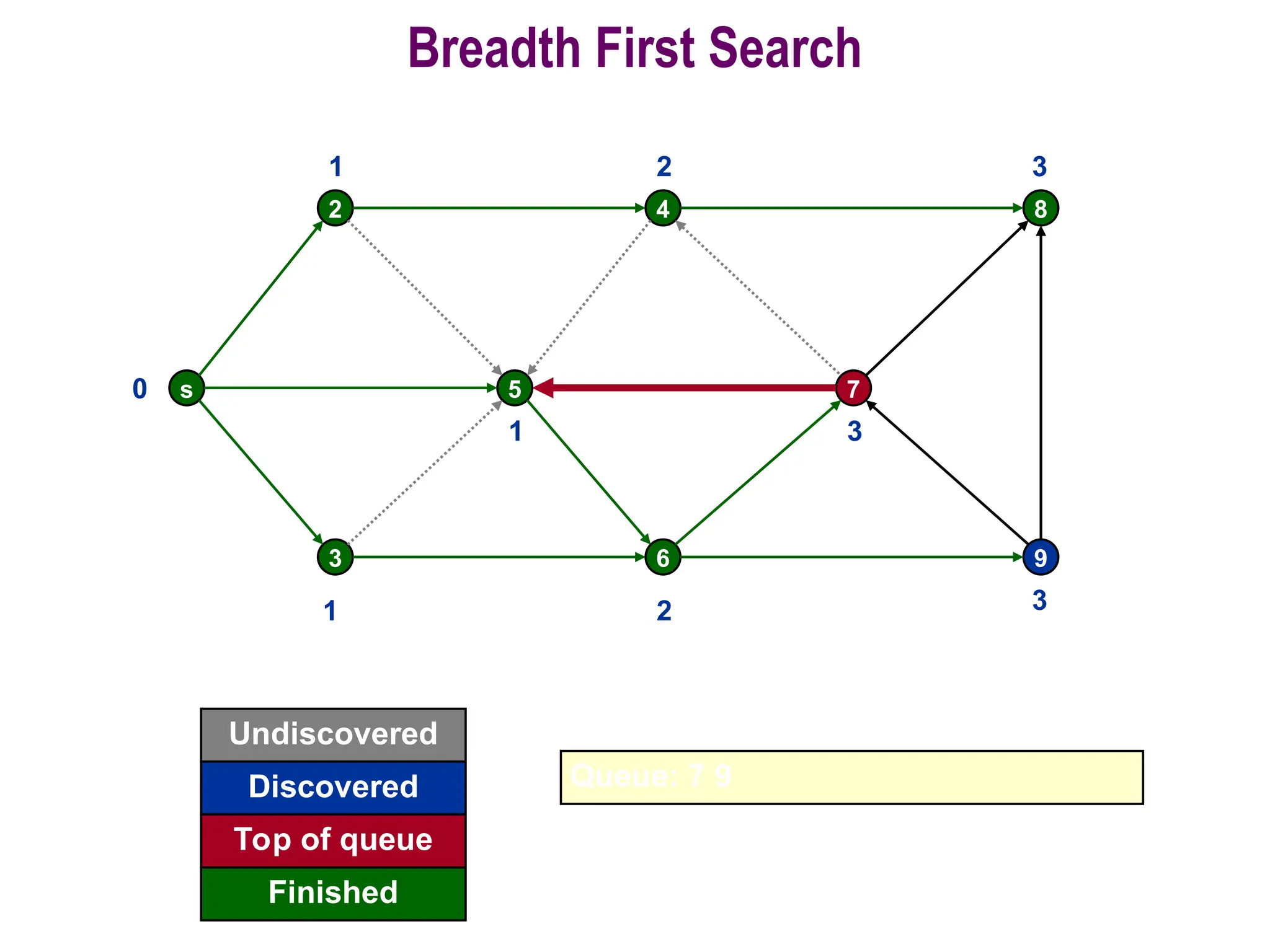
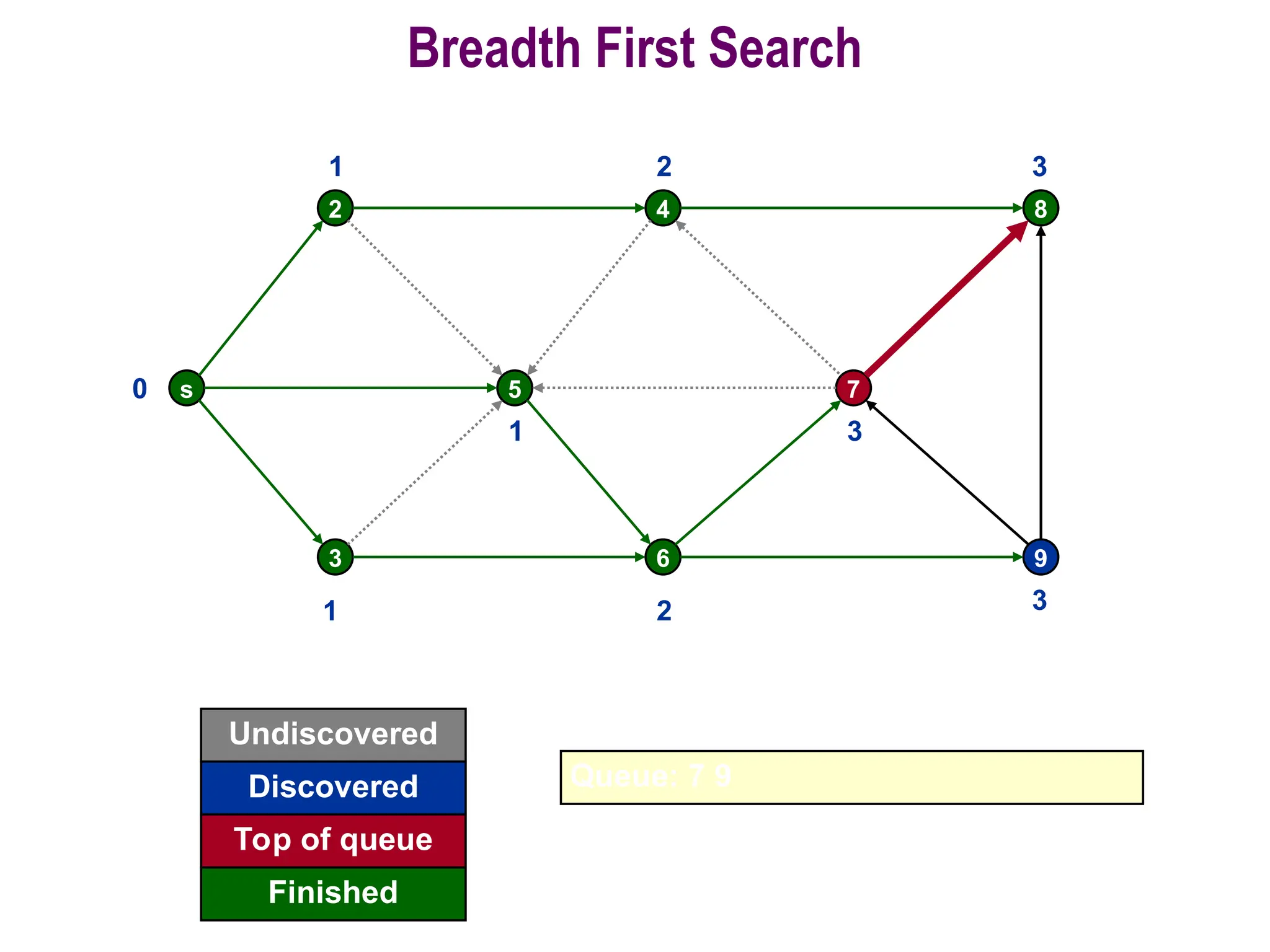
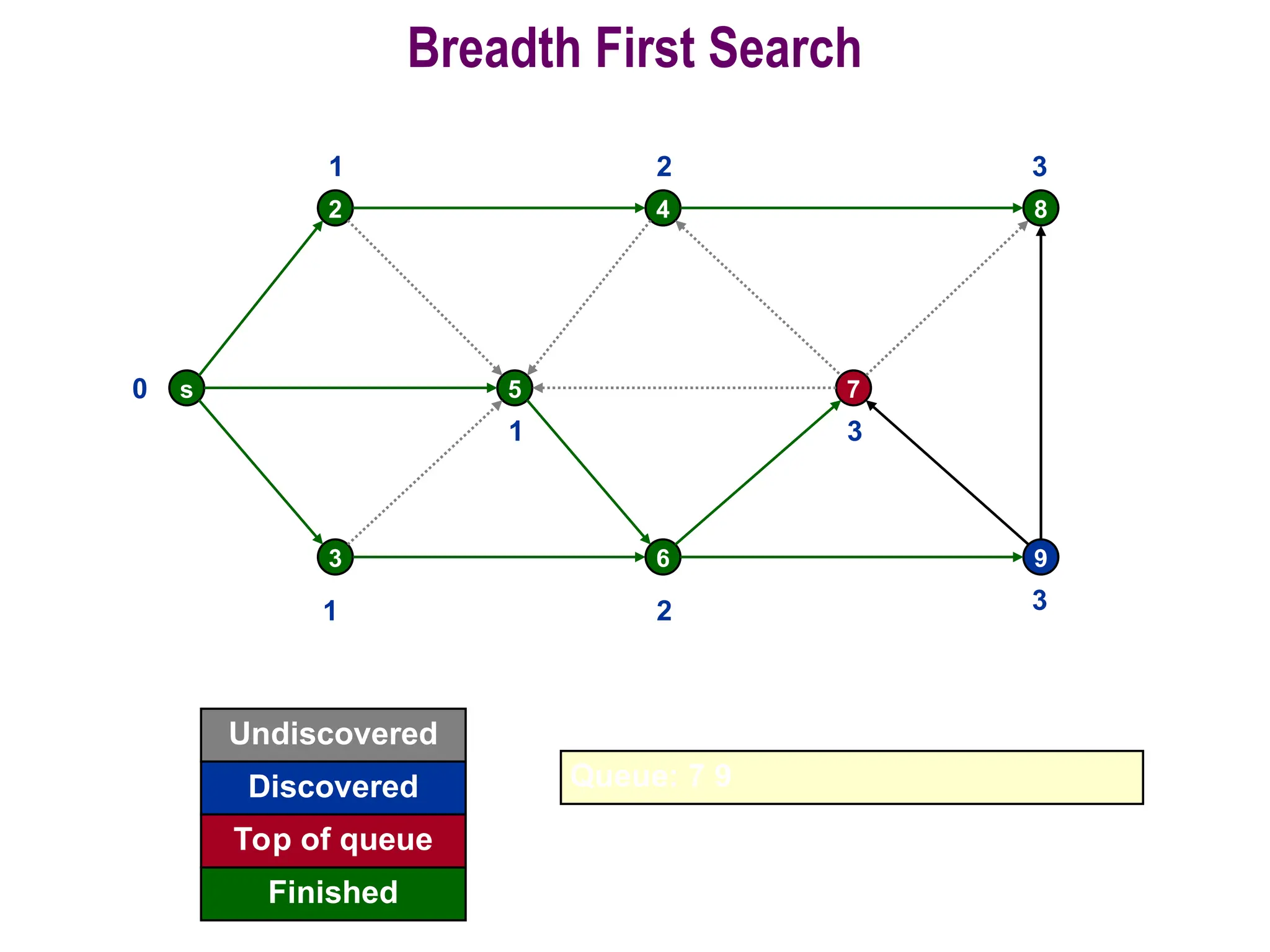
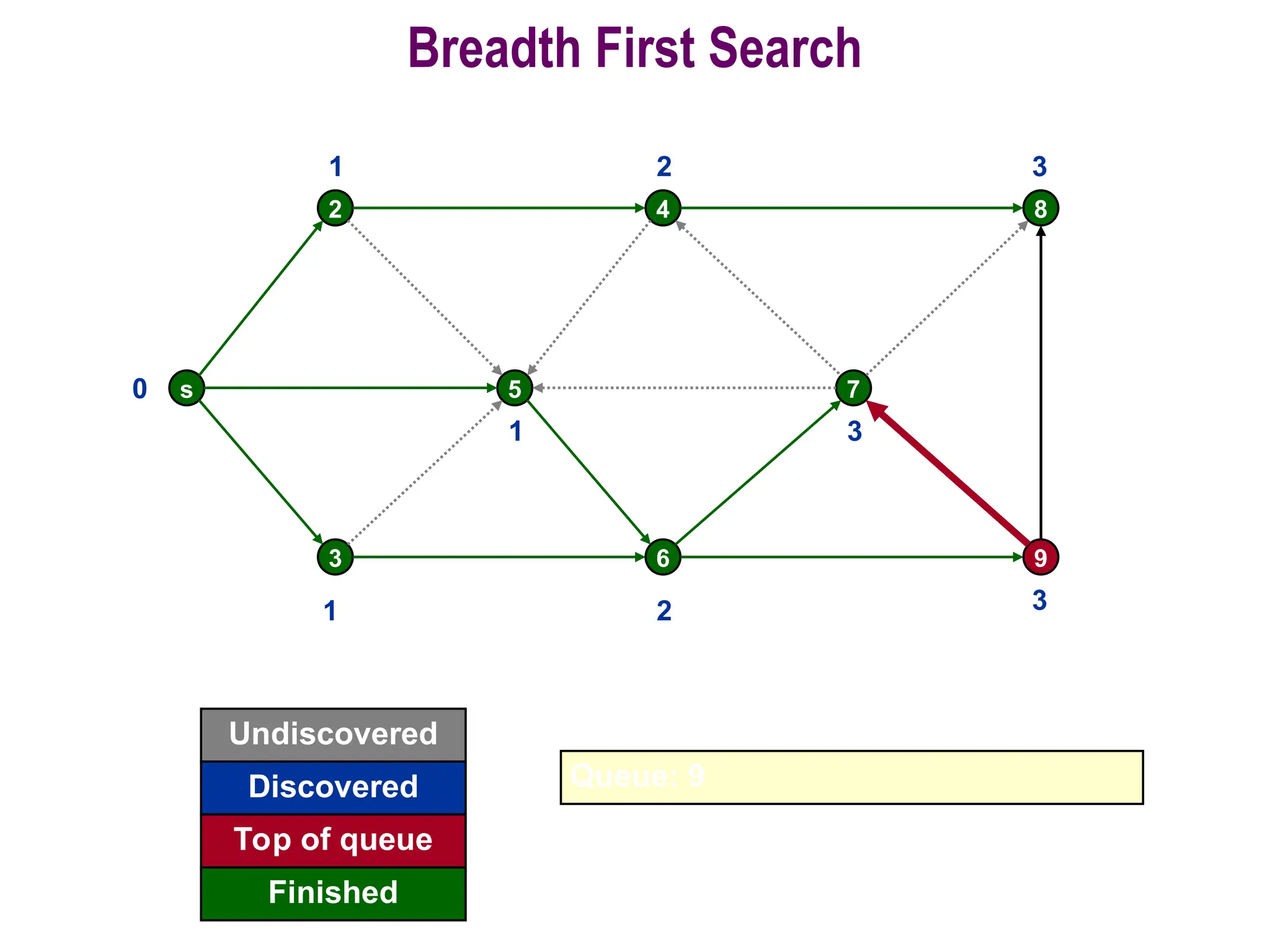
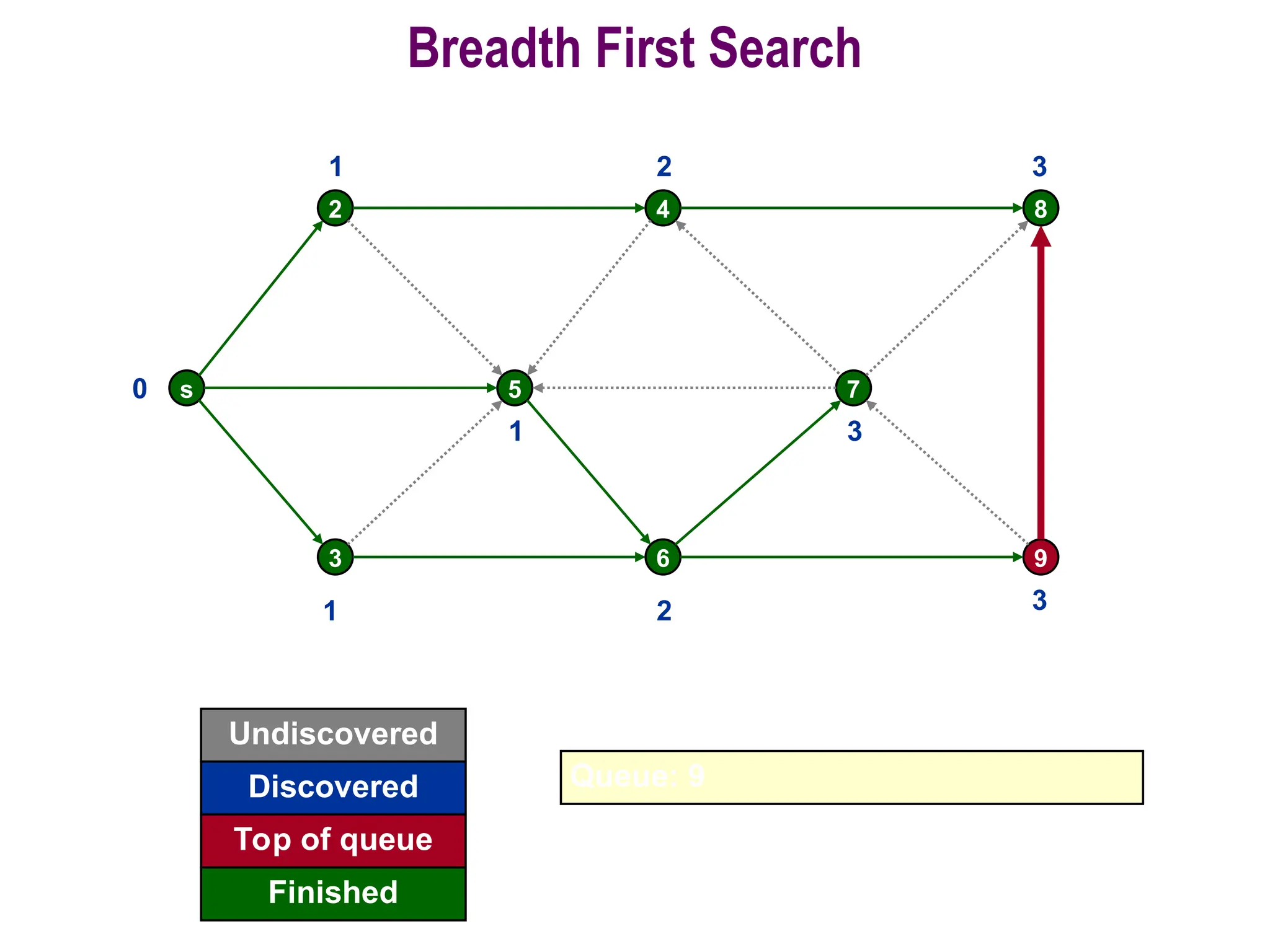
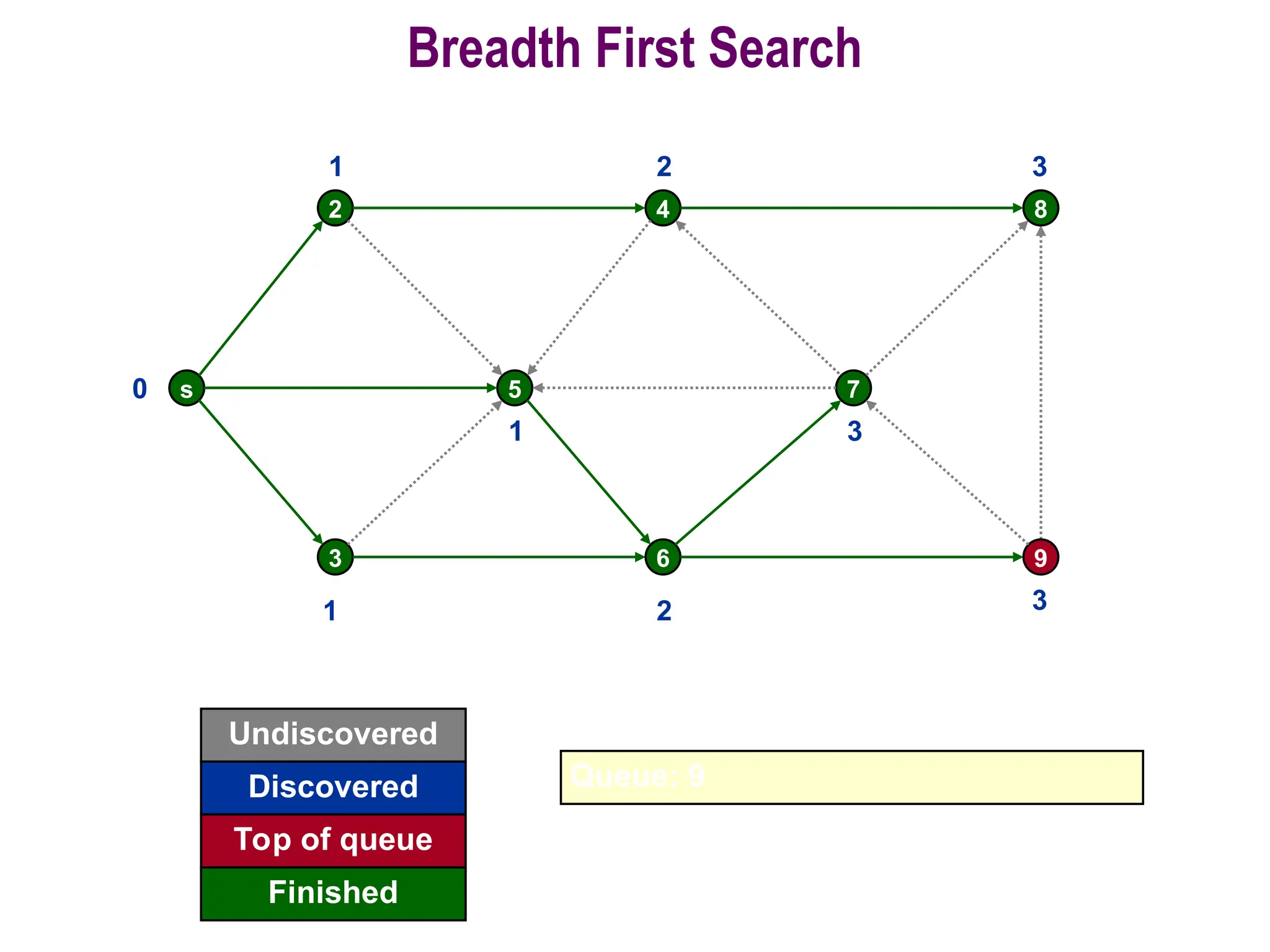
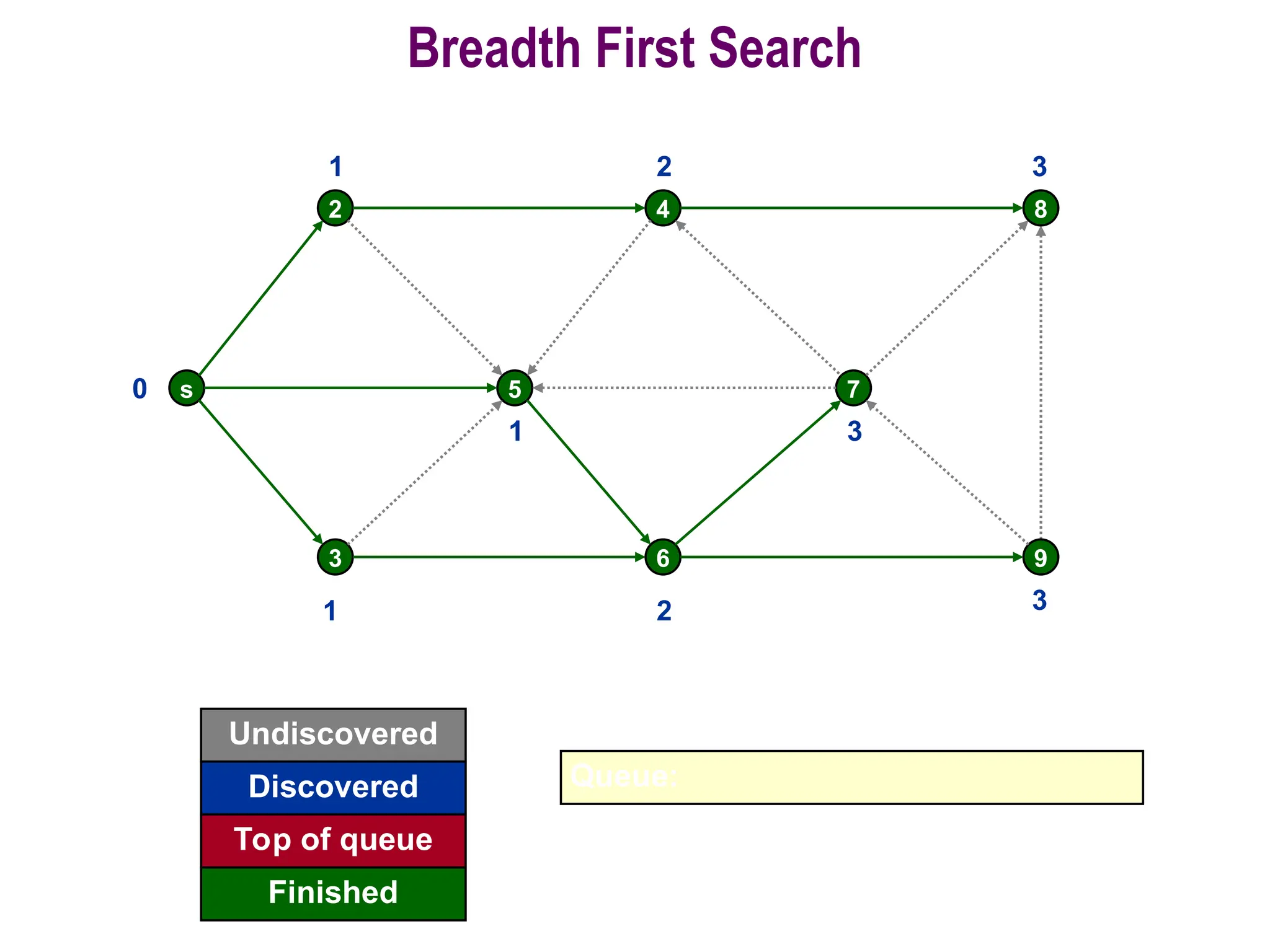
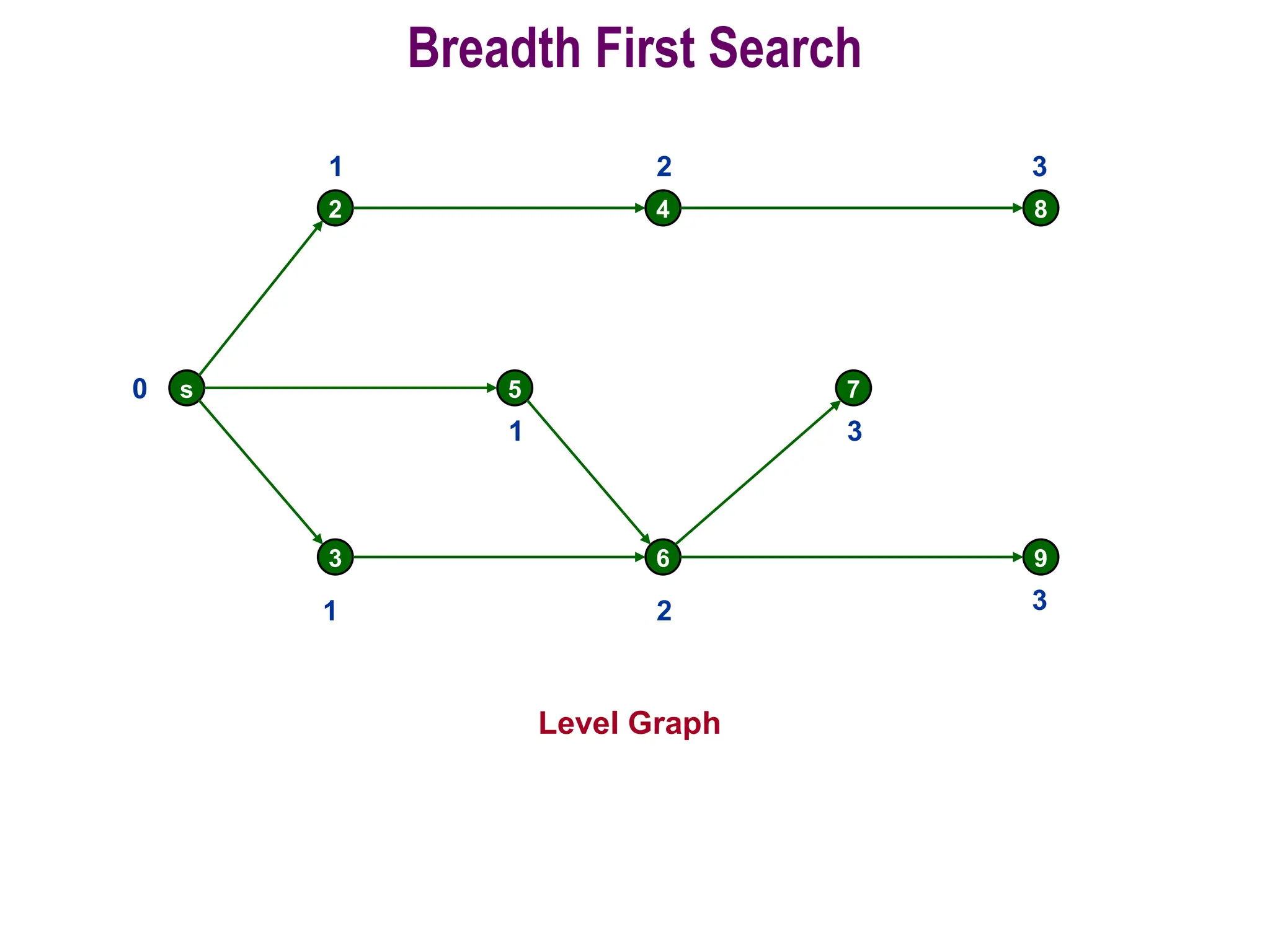
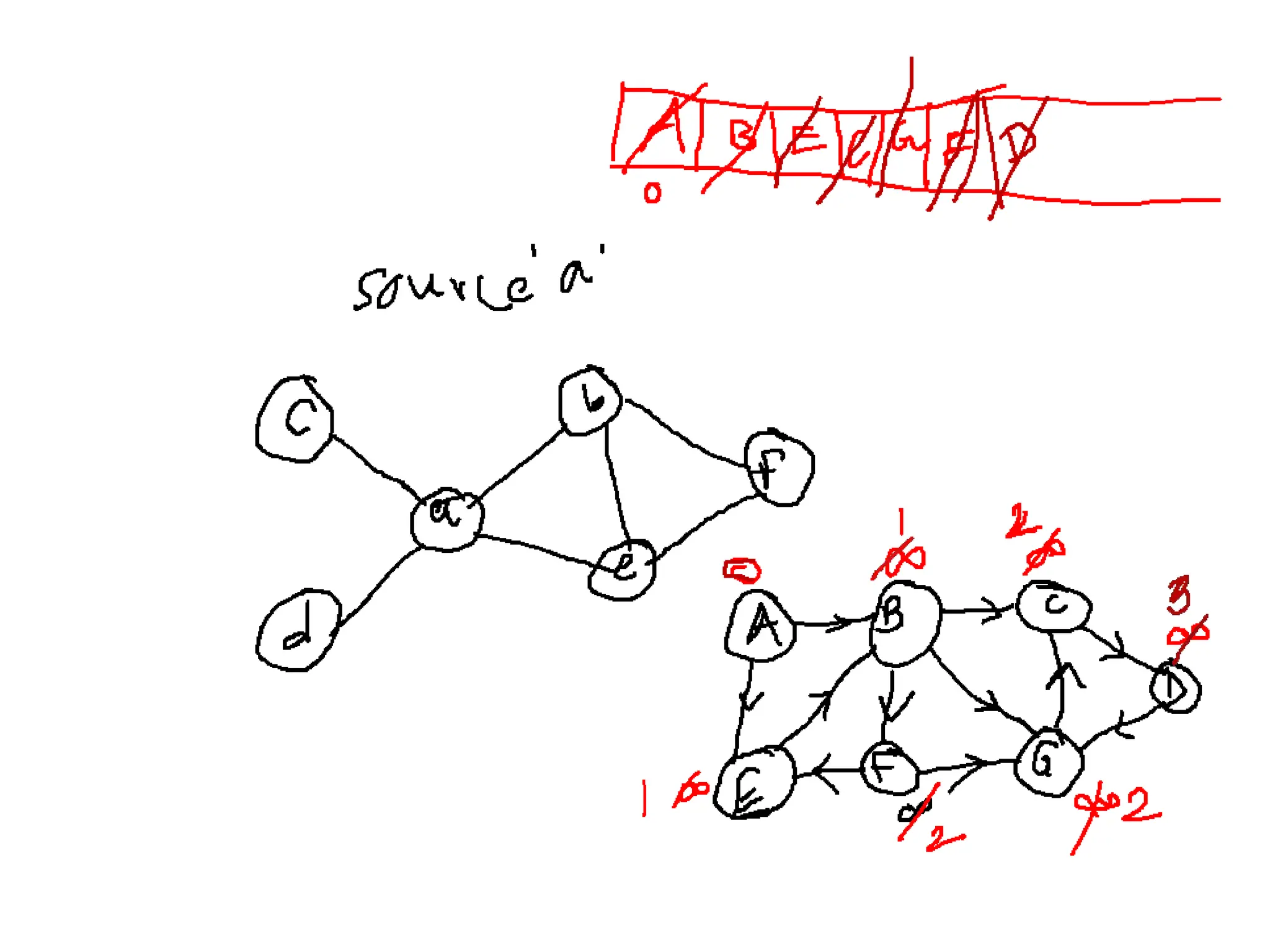
• The algorithmalso uses a FIFO queue Q to manage the set of gray vertices. • BFS starts at a given vertex (Source), which is at level 0. • In first stage we will visit all vertices at level 1,all white vertices which are adjacent to source. • These are colored as grey and added to the queue. Source is colored black. • D[v] value of all these vertices is increased by 1. (D[v] is distance of v from source.) • Now visit all vertices at second level. • Once vertex is explored it is colored black and is deleted from queue. • The process stops when queue is empty.
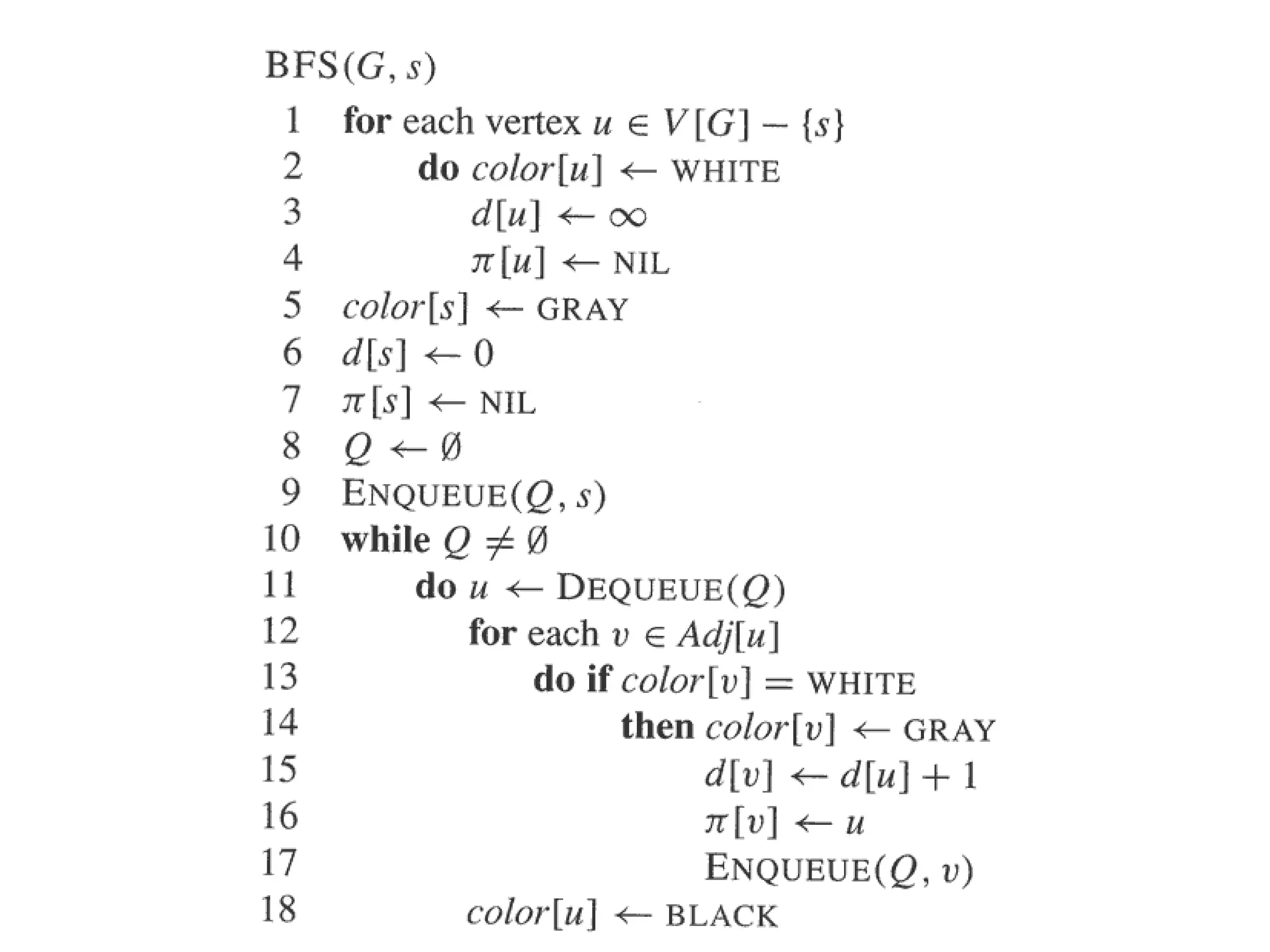
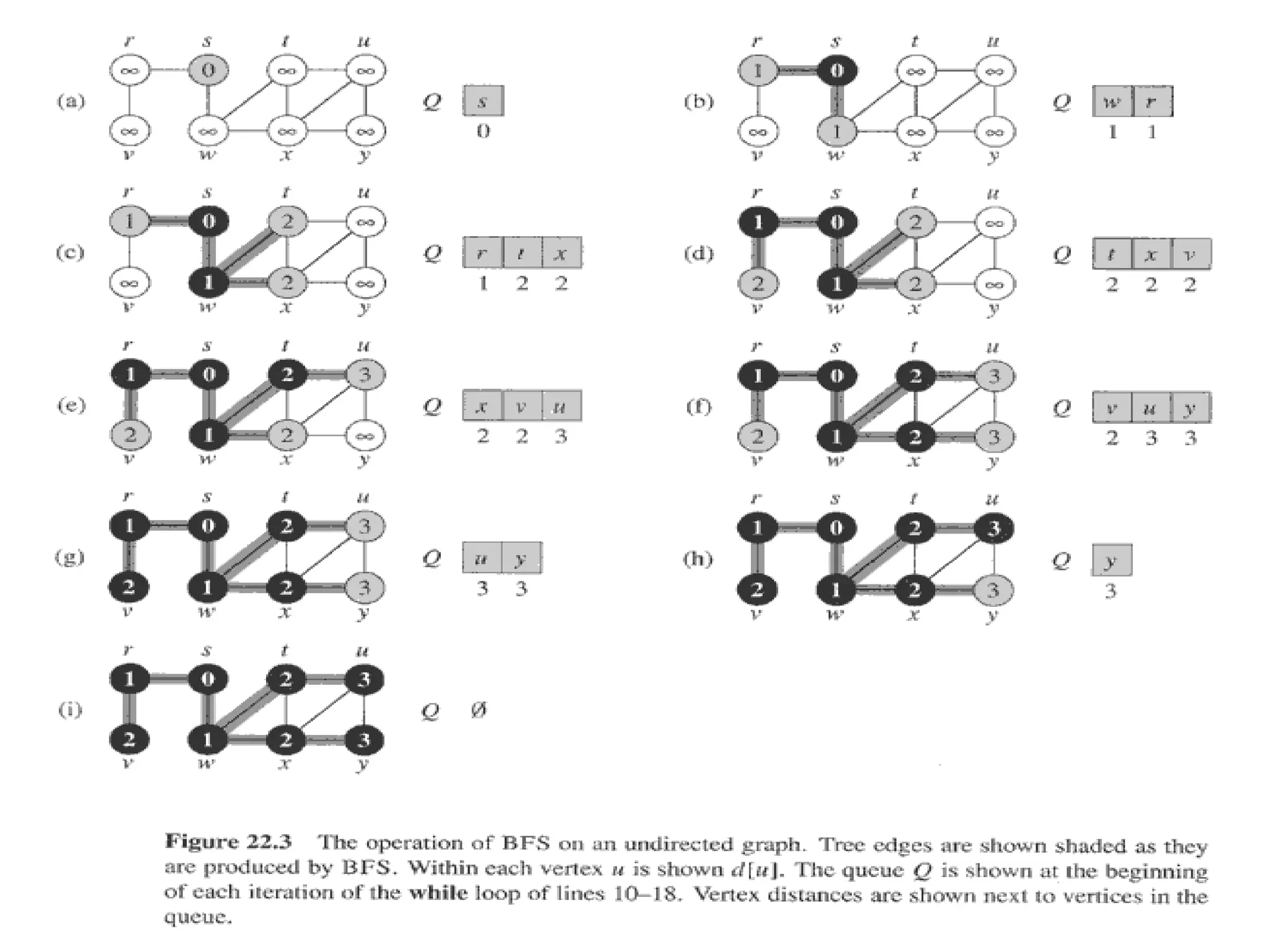
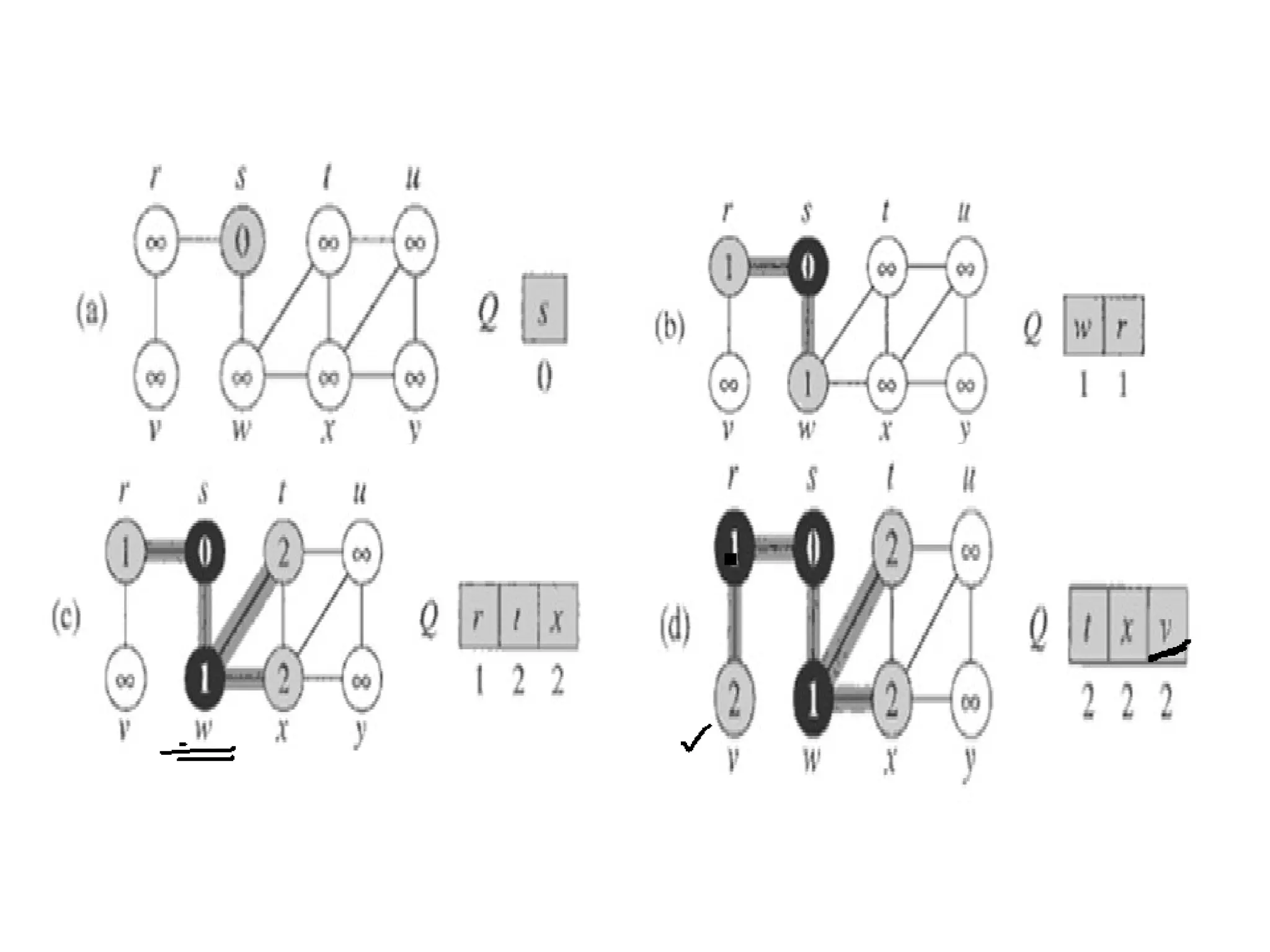
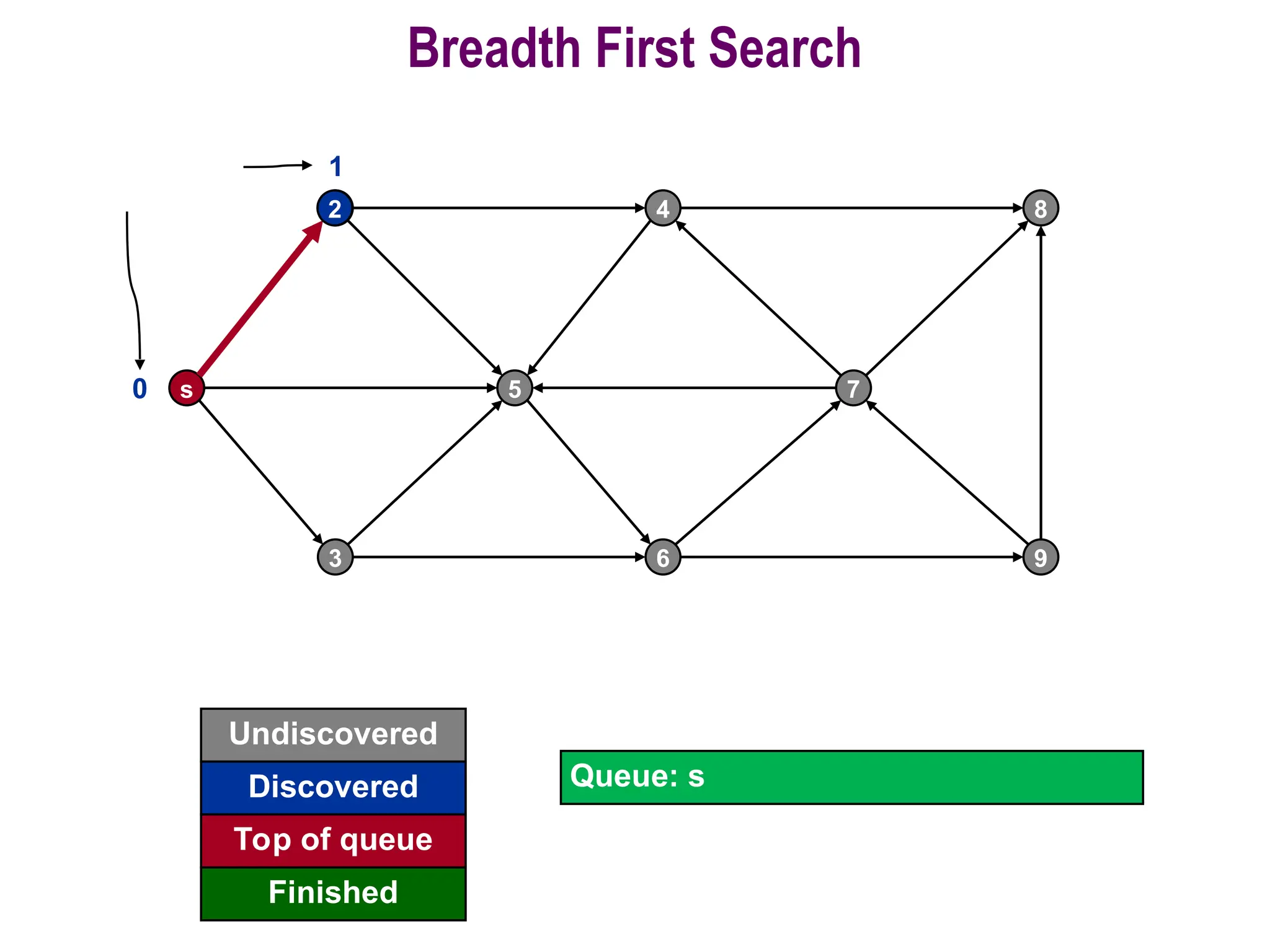
• Lines 1-4paint every vertex white, set d[u] to be infinity for each vertex u, and set the parent of every vertex to be NIL. • Line 5 paints the source vertex s gray, since it is considered to be discovered when the procedure begins. • Line 6 initializes d[s] to be 0, and line 7 sets the predecessor of the source to be NIL. • Lines 8-9 initialize Q to the queue containing just the vertex s. Working of BFS Working of BFS
23.
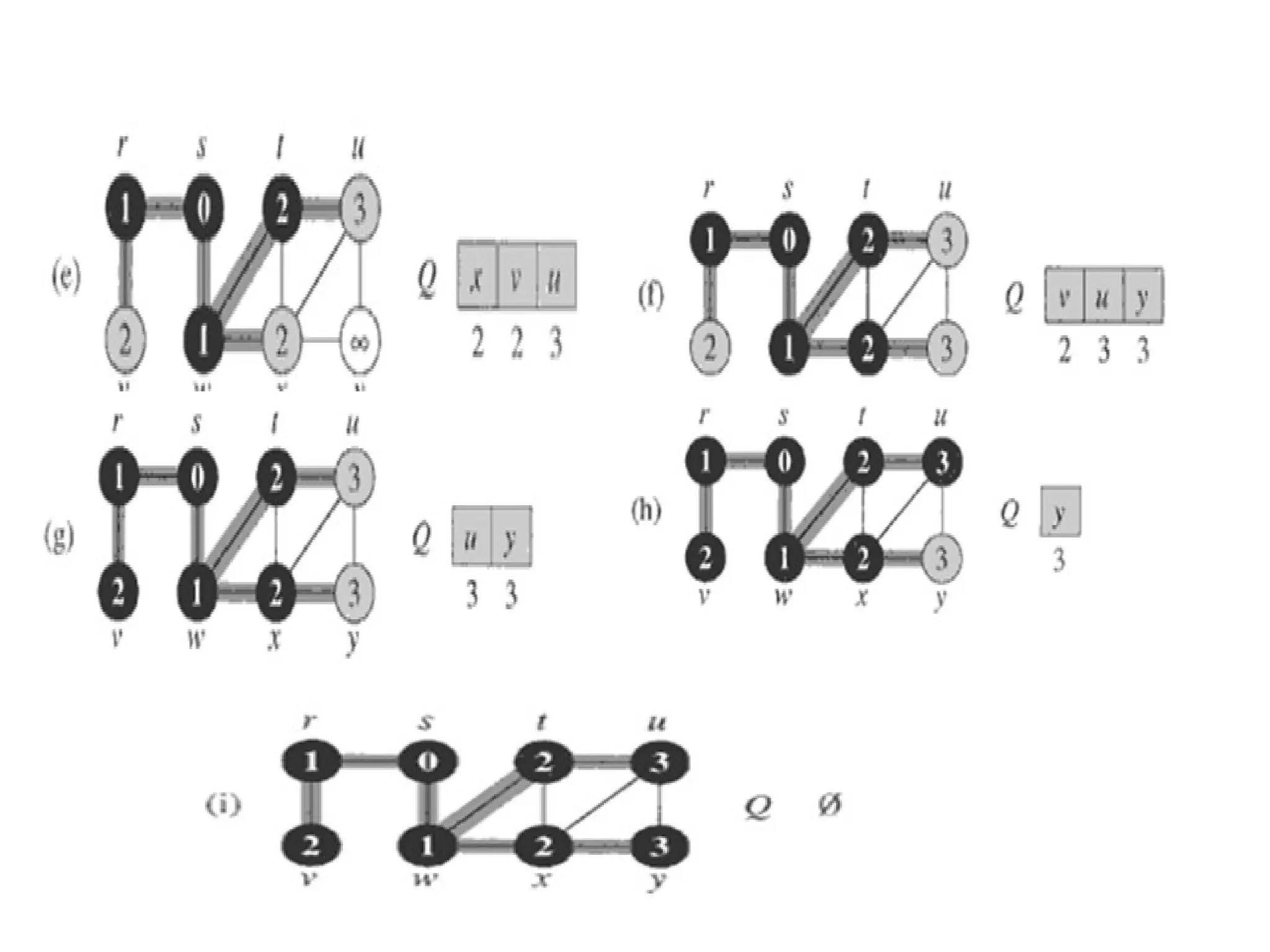
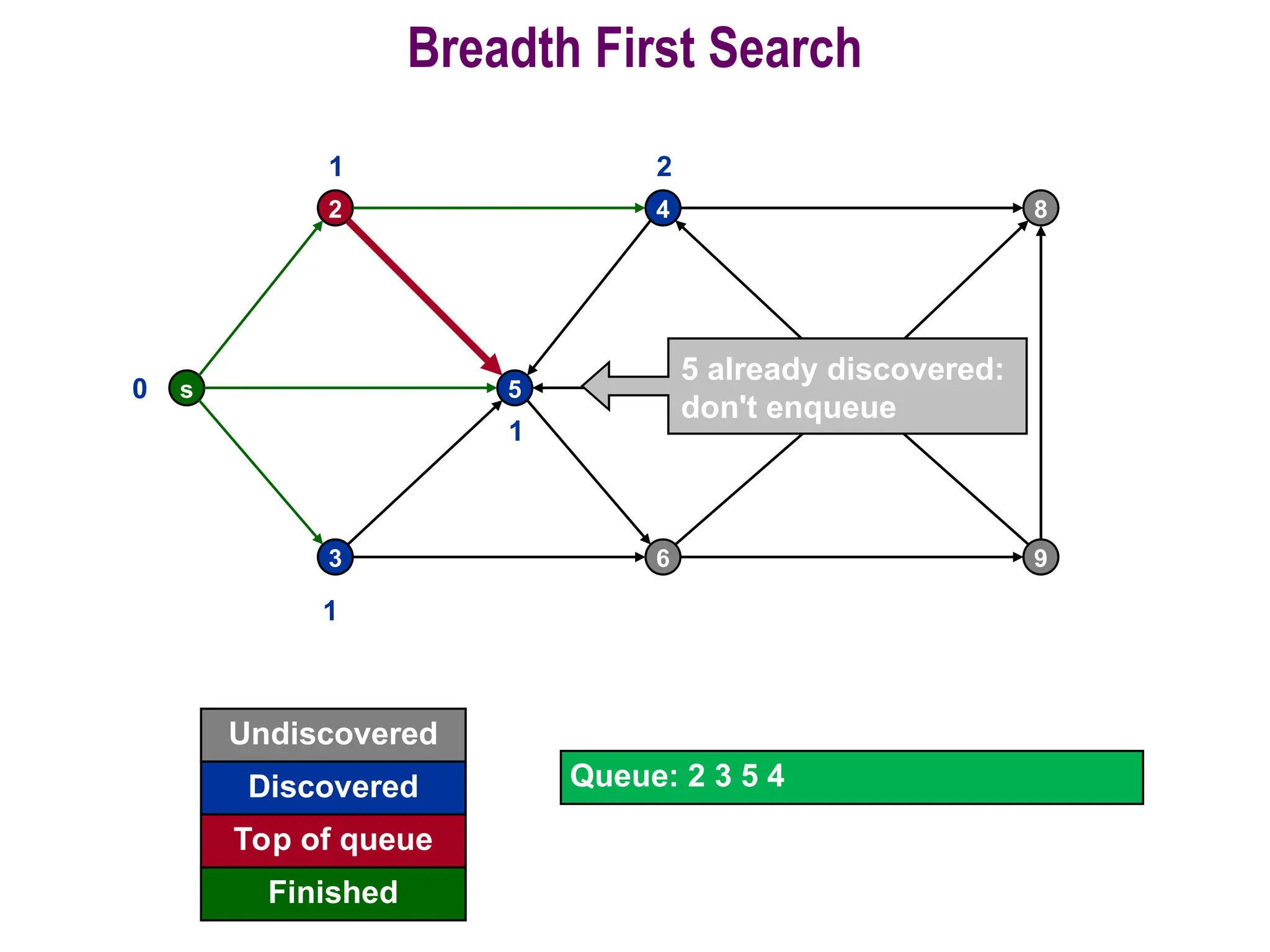
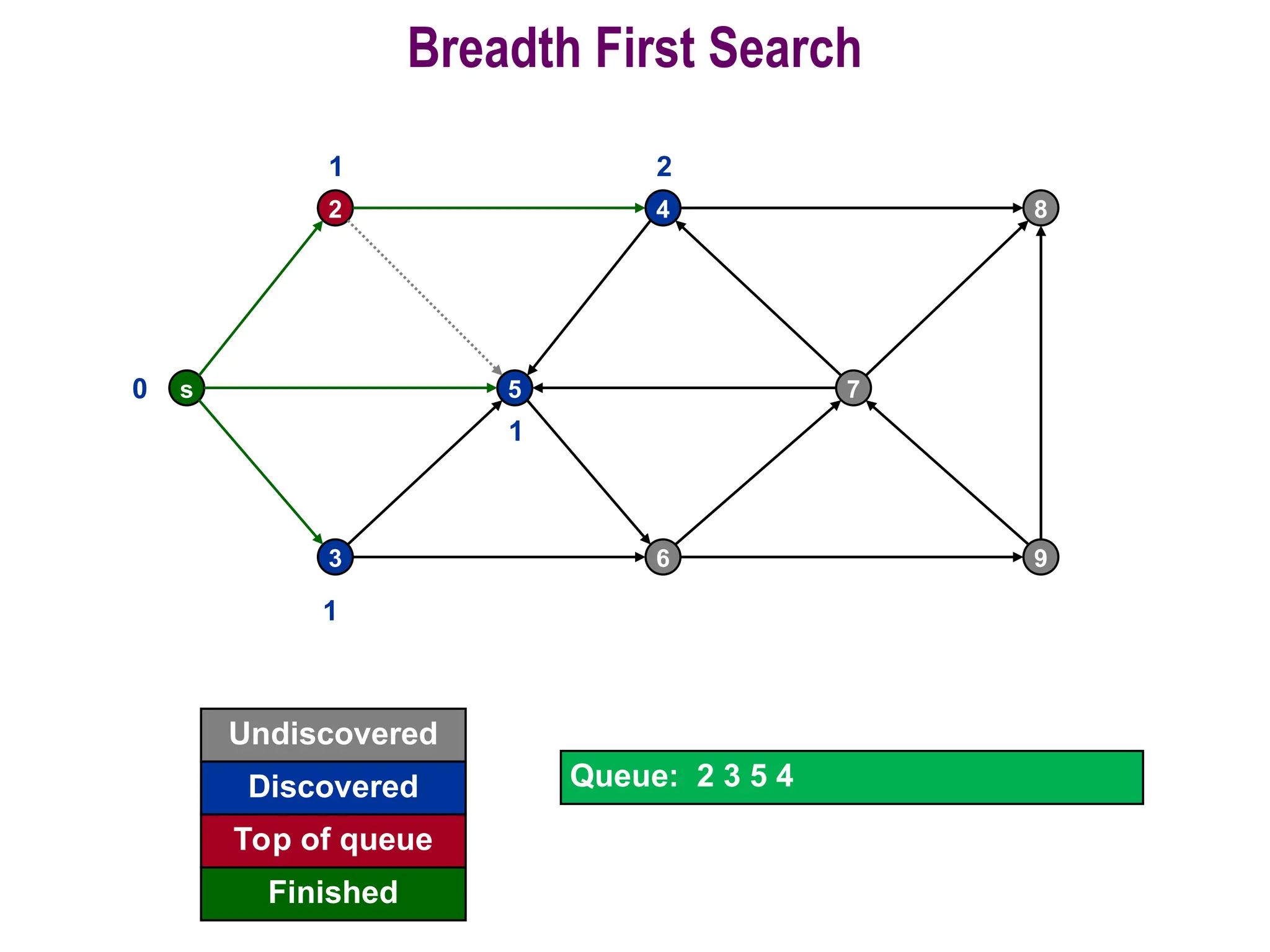
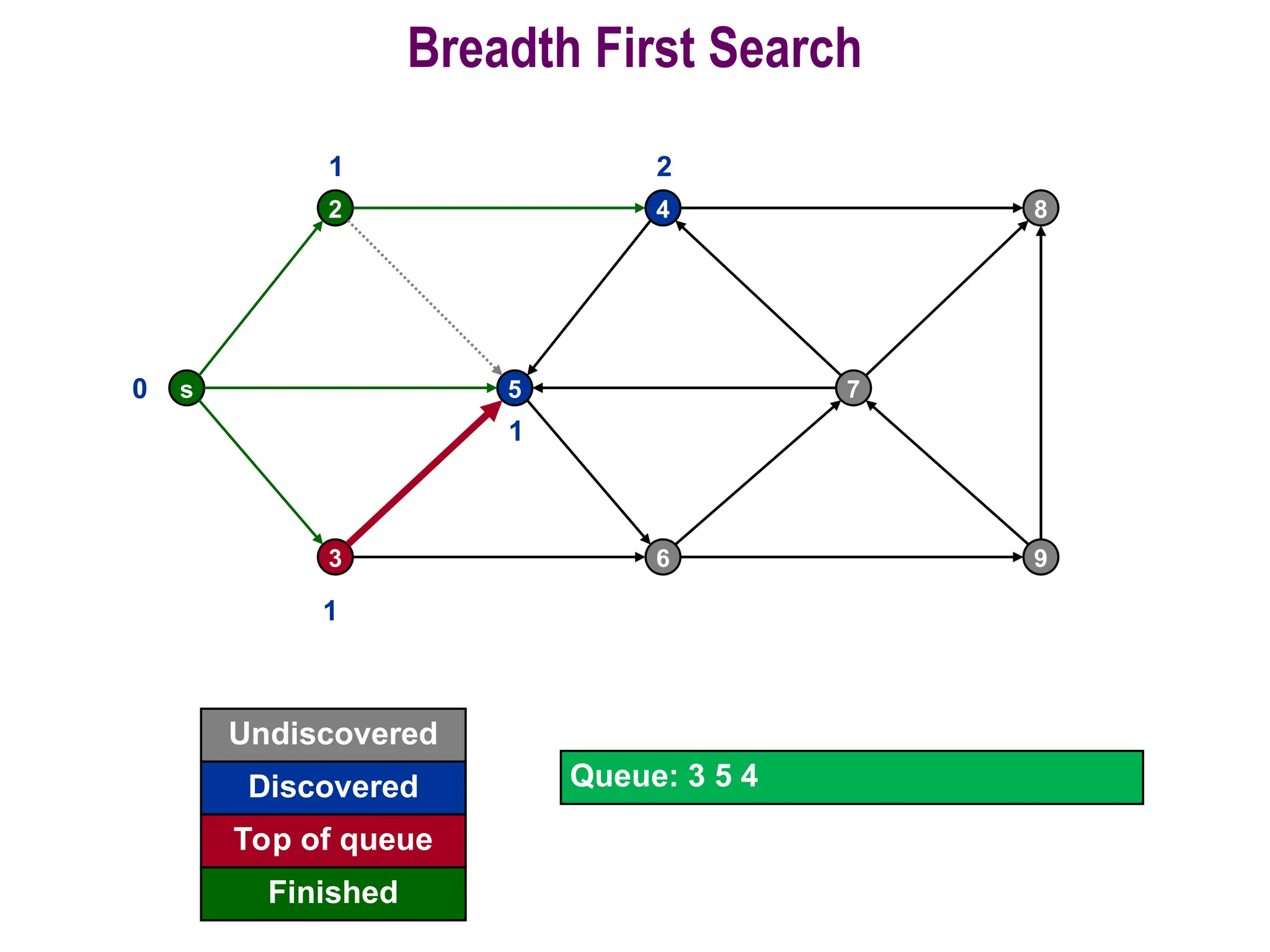
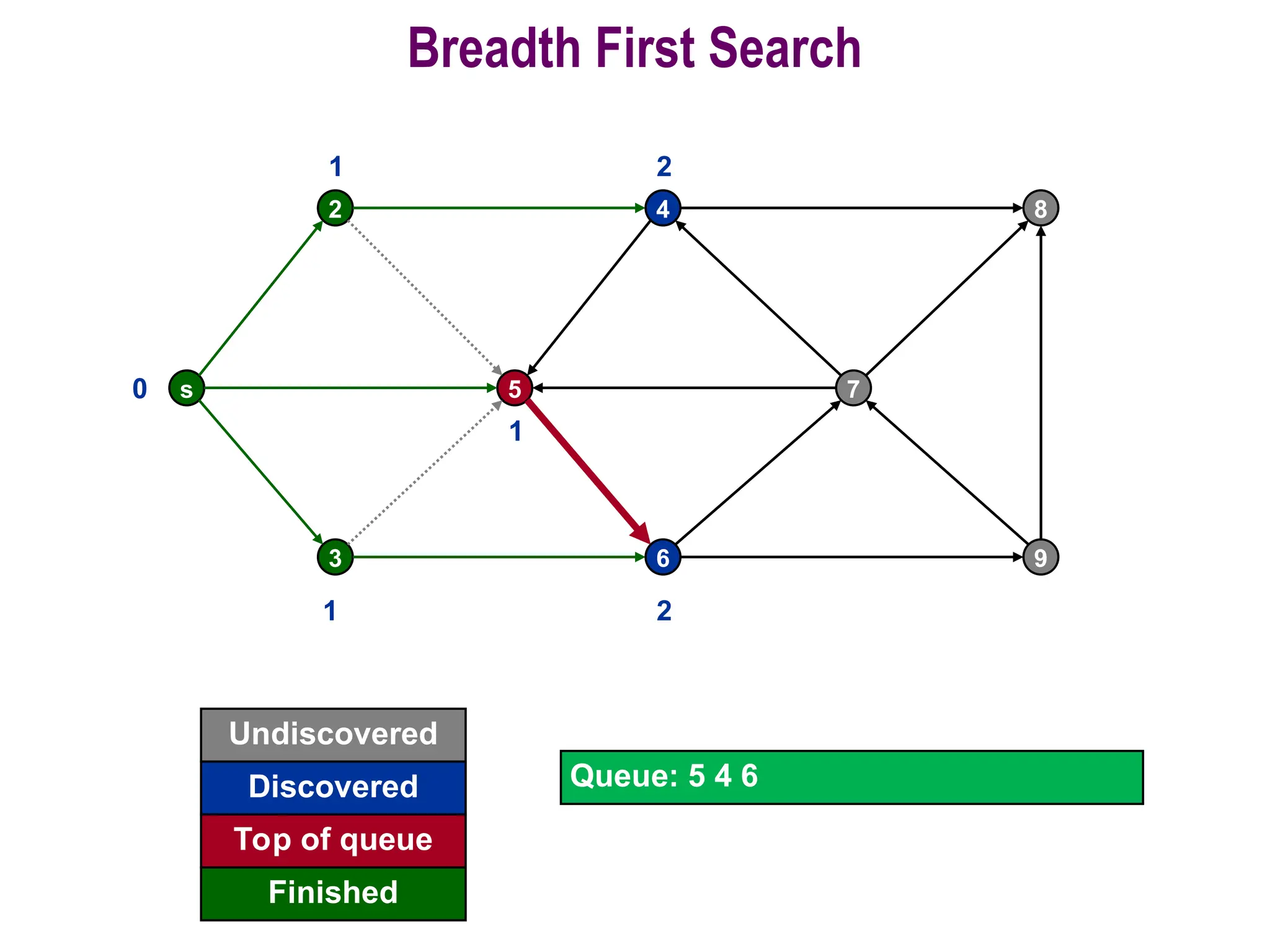
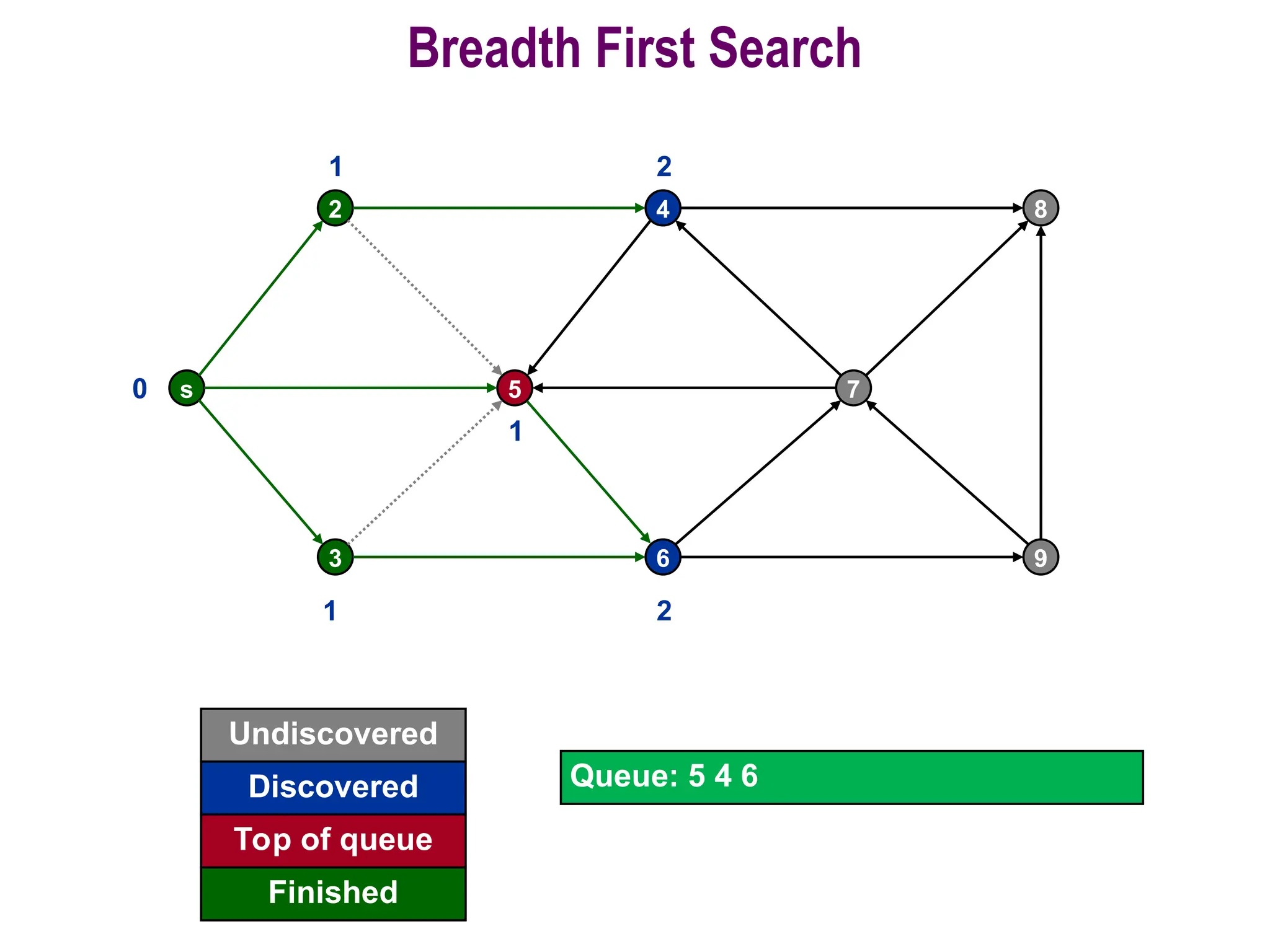
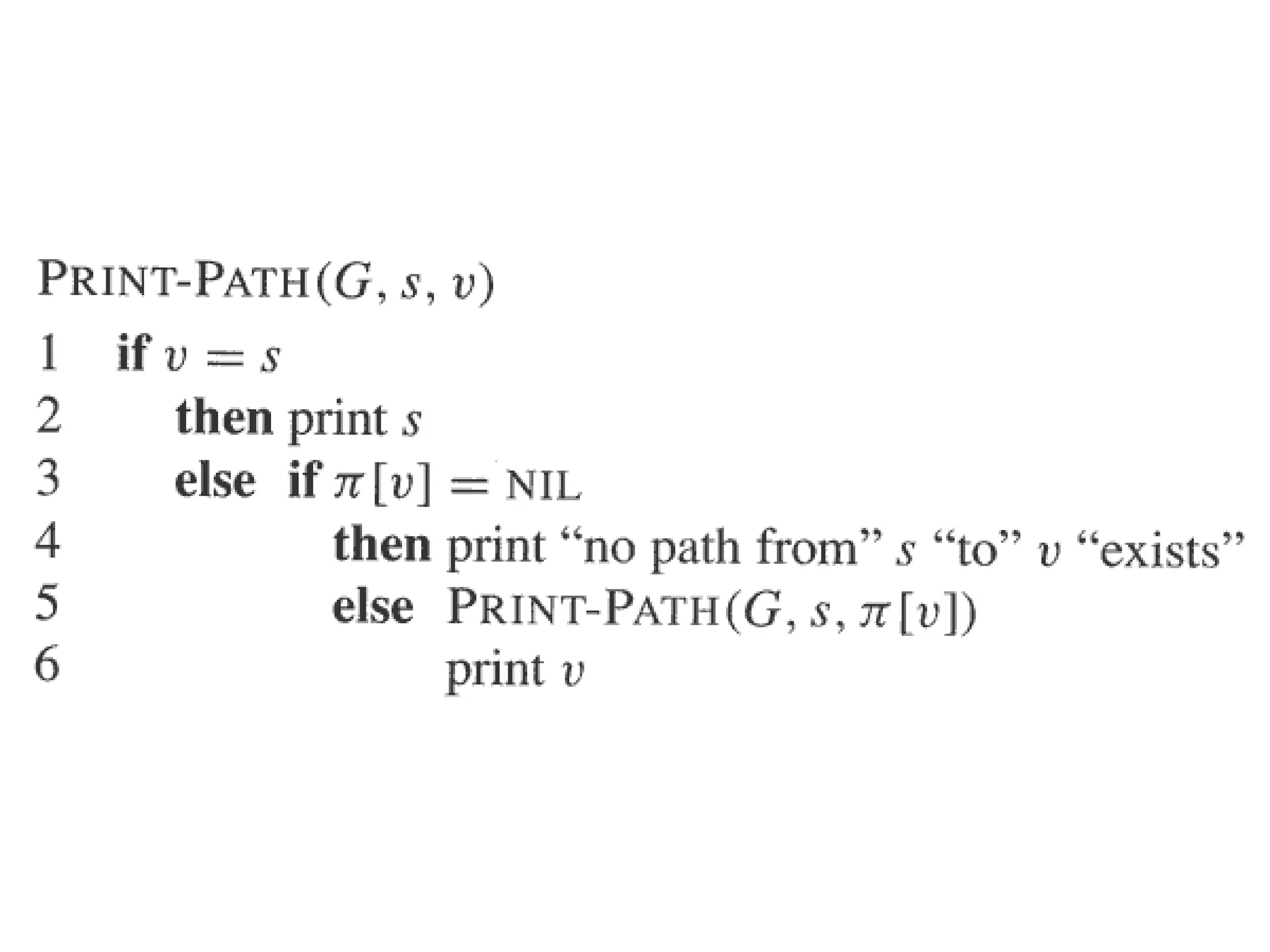
• The whileloop of lines 10-18 iterates as long as there remain gray vertices, which are discovered vertices that have not yet had their adjacency lists fully examined. • The results of BFS may depend upon the order in which the neighbors of a given vertex are visited in line 12: the BFS tree may vary, but the distances d computed by the algorithm will not. Working of BFS Working of BFS
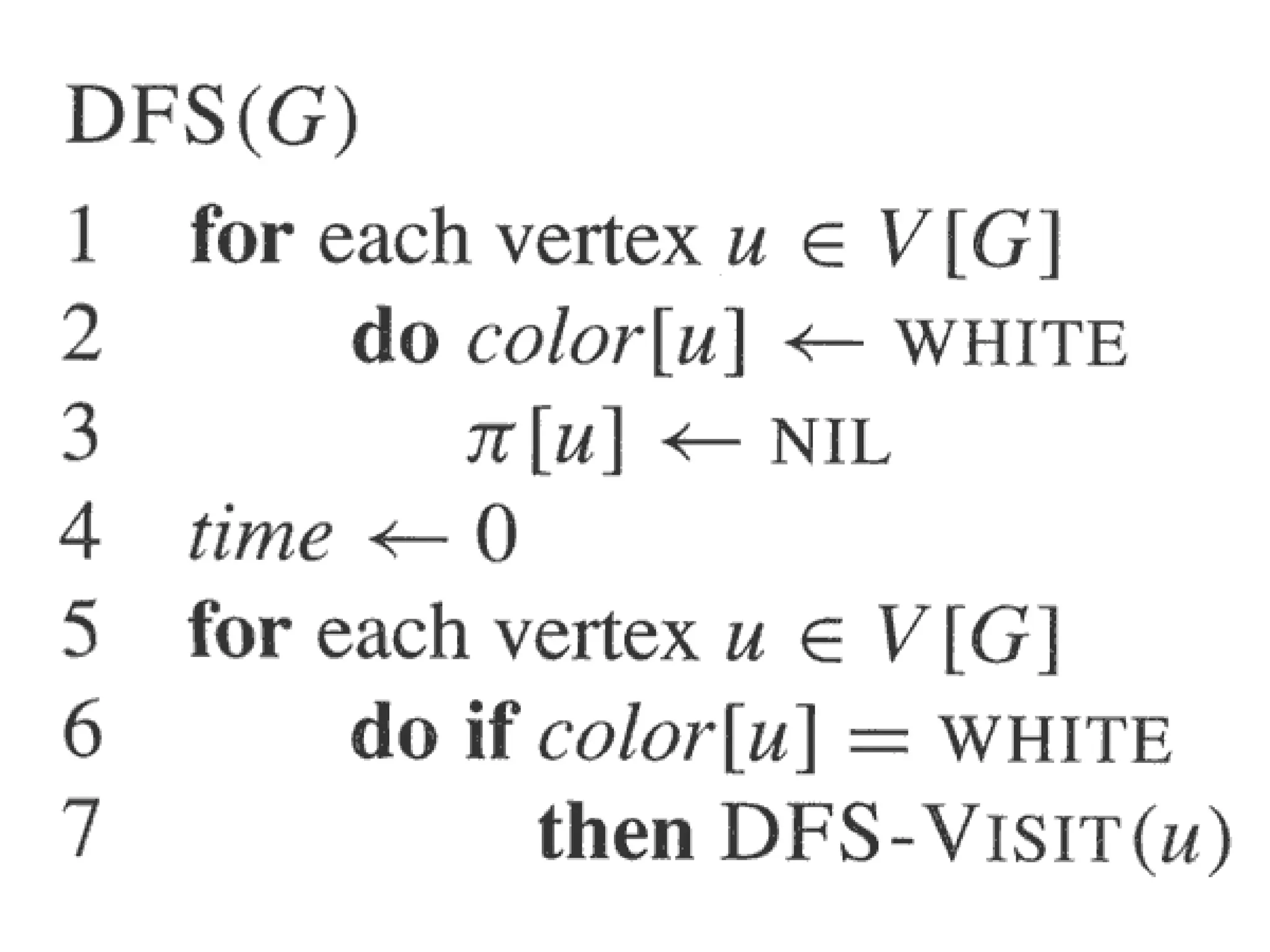
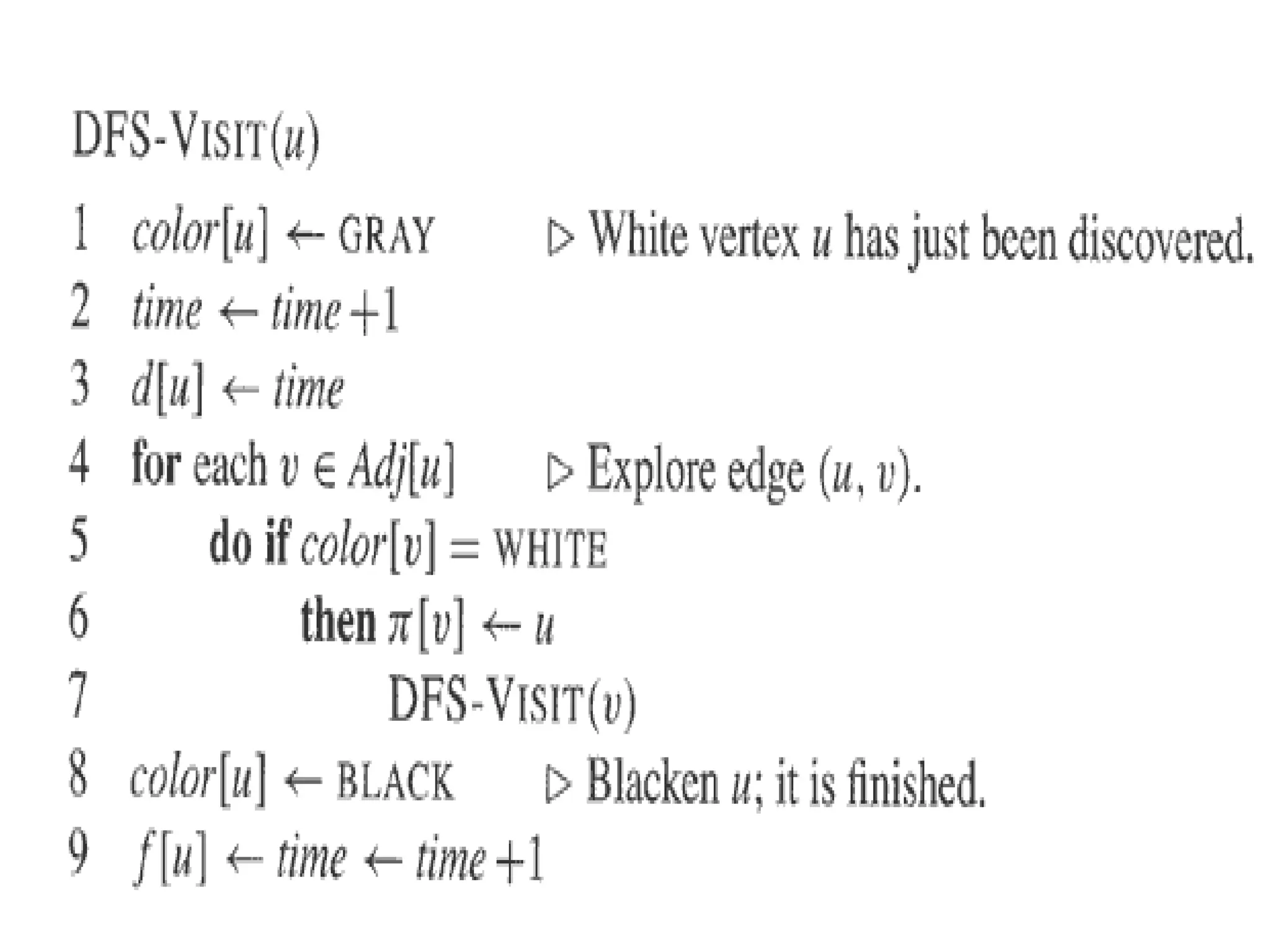
• The strategyis, to search “deeper” in the graph whenever possible. • As in BFS, vertices are colored during the search to indicate their state. • Each vertex is initially white, is grayed when it is discovered in the search, and is blackened when it is finished, • i.e. it’s adjacency list has been examined completely. This technique guarantees that each vertex ends up in exactly one depth-first tree, so that these trees are disjoint. DFS DFS
59.
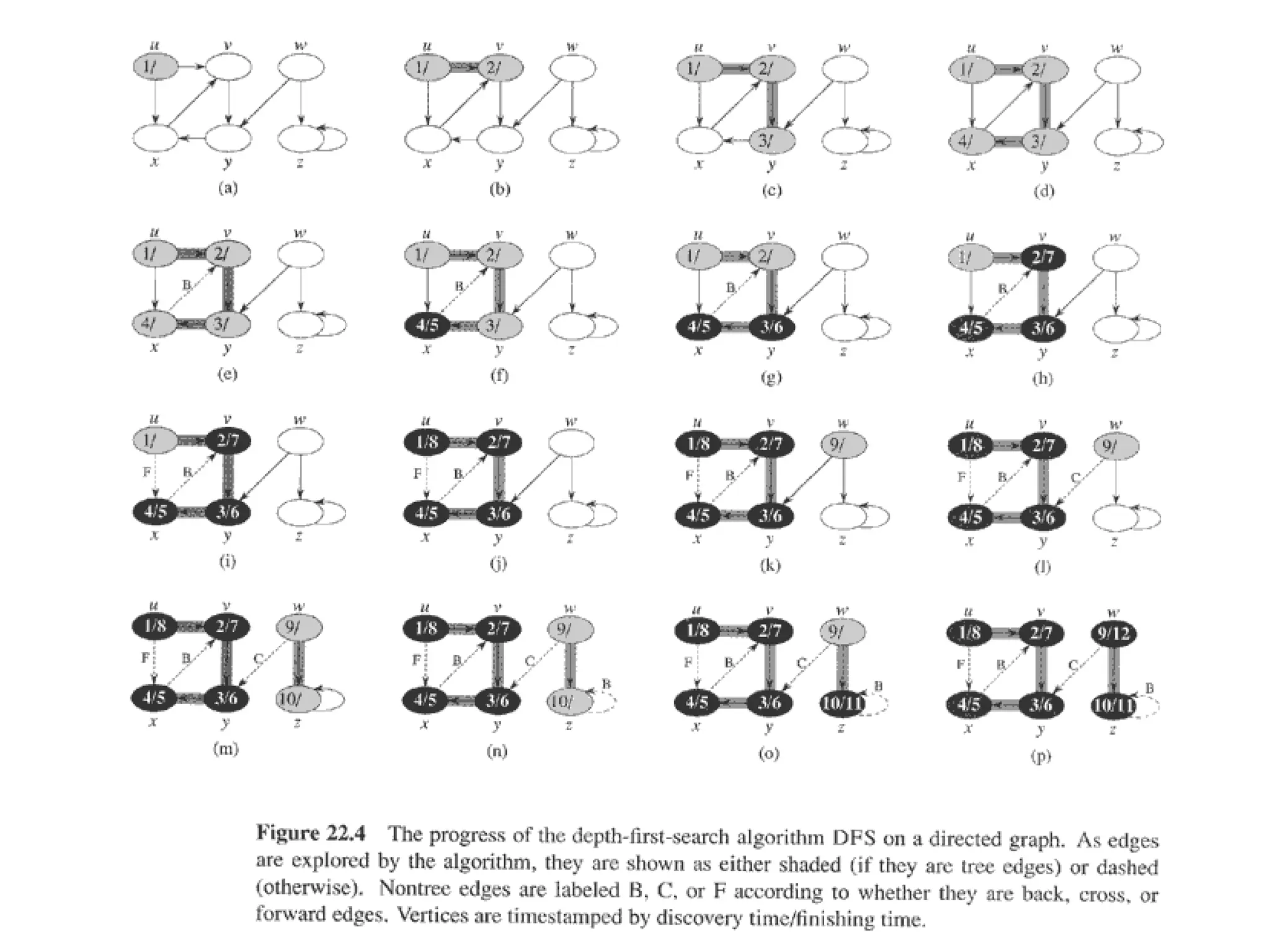
• Besides creatinga depth-first forest, DFS also timestamps each vertex. • Each vertex u has 2 timestamps: the first timestamp d[u] records when u is first discovered (and grayed), and the second timestamp f[u] records when the search finishes examining u’s adjacency list (and blackens u). • These timestamps are used in many graph algorithms and are generally helpful in reasoning about the behavior of DFS.
• Tree edgesare edges in the depth-first forest. Edge (u, v) is a tree edge if v was first discovered by exploring edge (u, v). e.g. white • Back edges are those edges (u, v) connecting a vertex u to an ancestor v in a depth-first tree. Self loops, which may occur in directed graphs, are considered to be back edges. e.g. gray • Forward edges are those nontree edges (u, v) connecting a vertex u to a descendant v in a depth- first tree. e.g. black • Cross edges are all other edges. e.g. black Classification of edges Classification of edges
64.
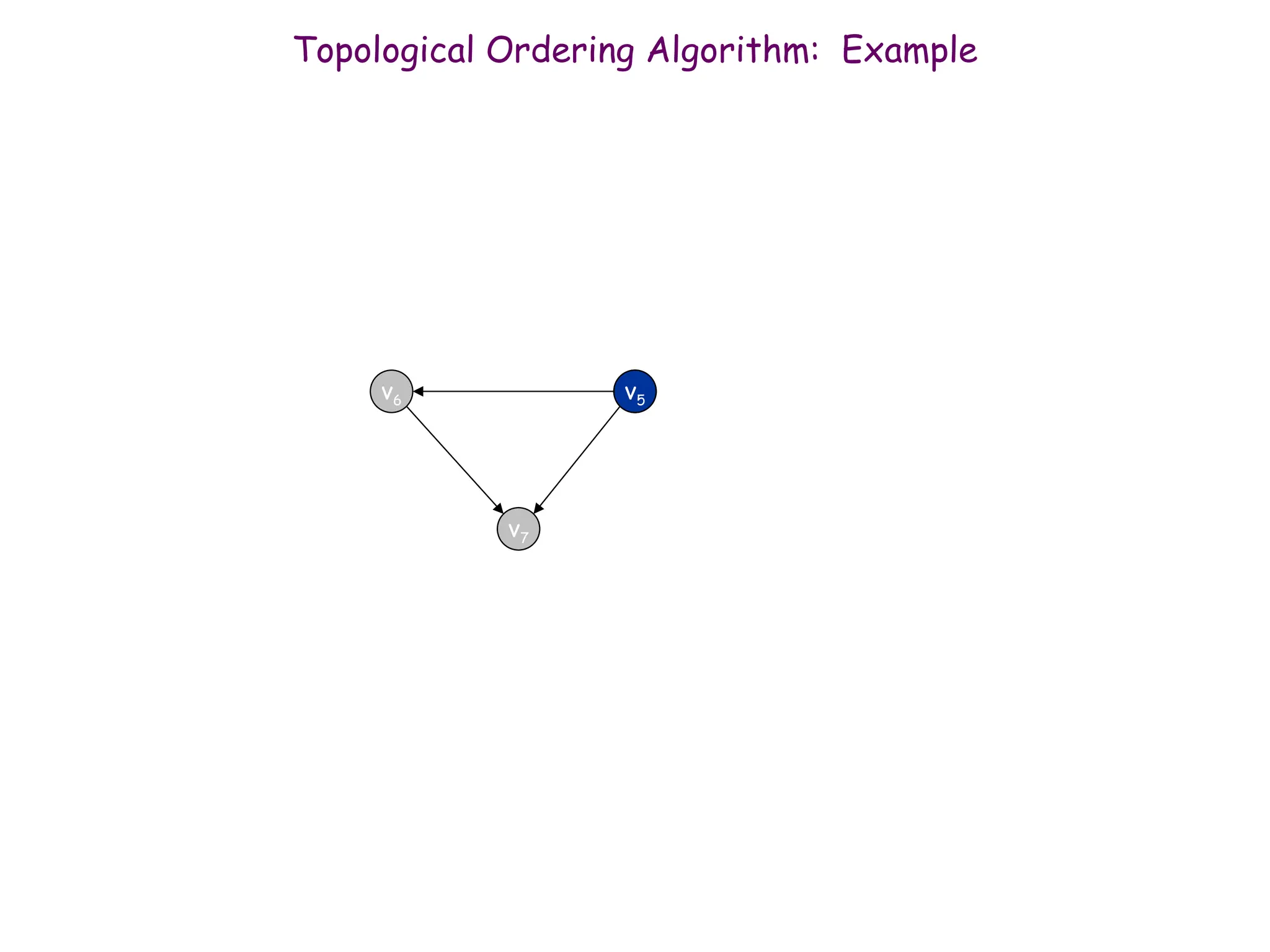
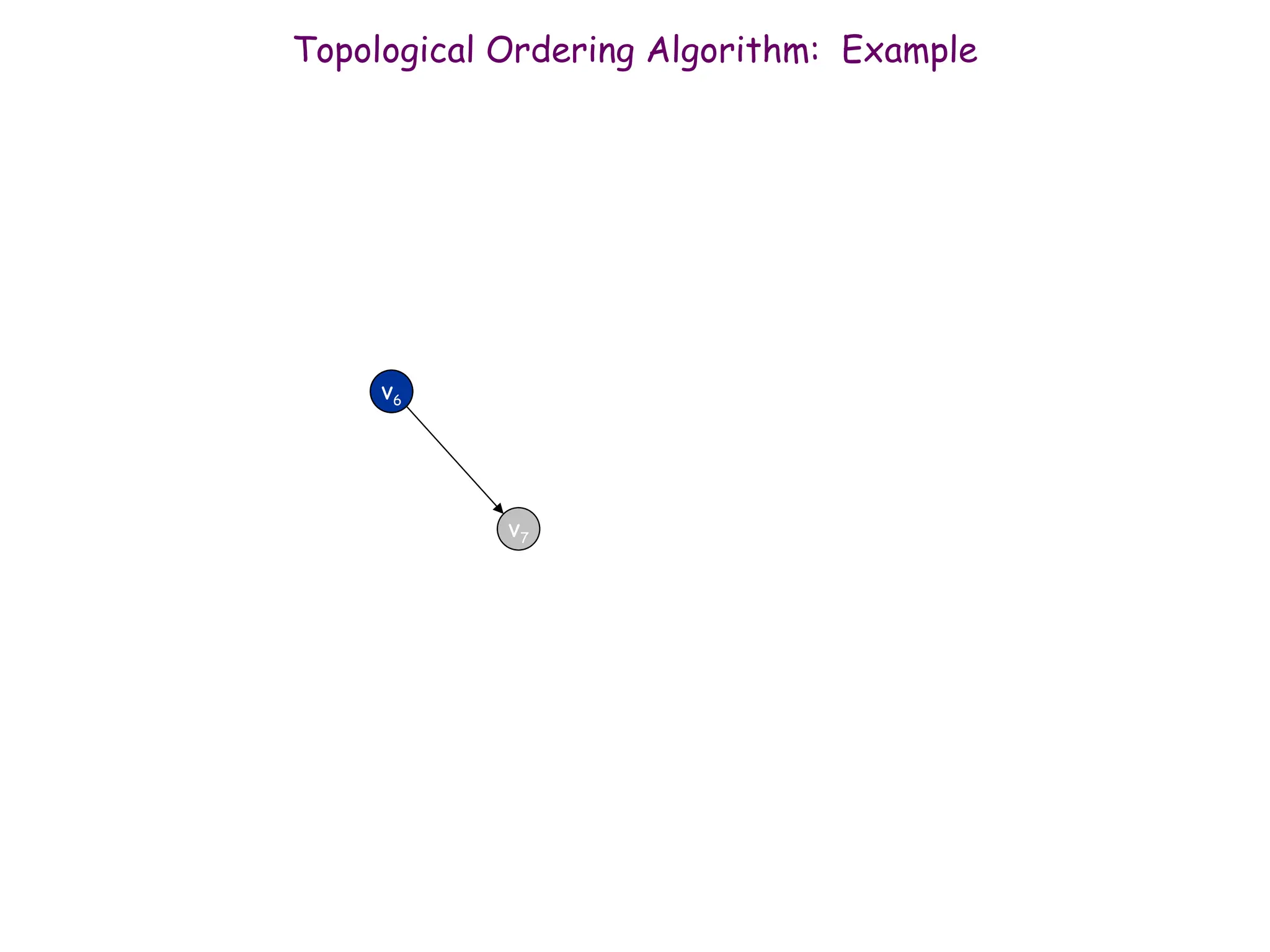
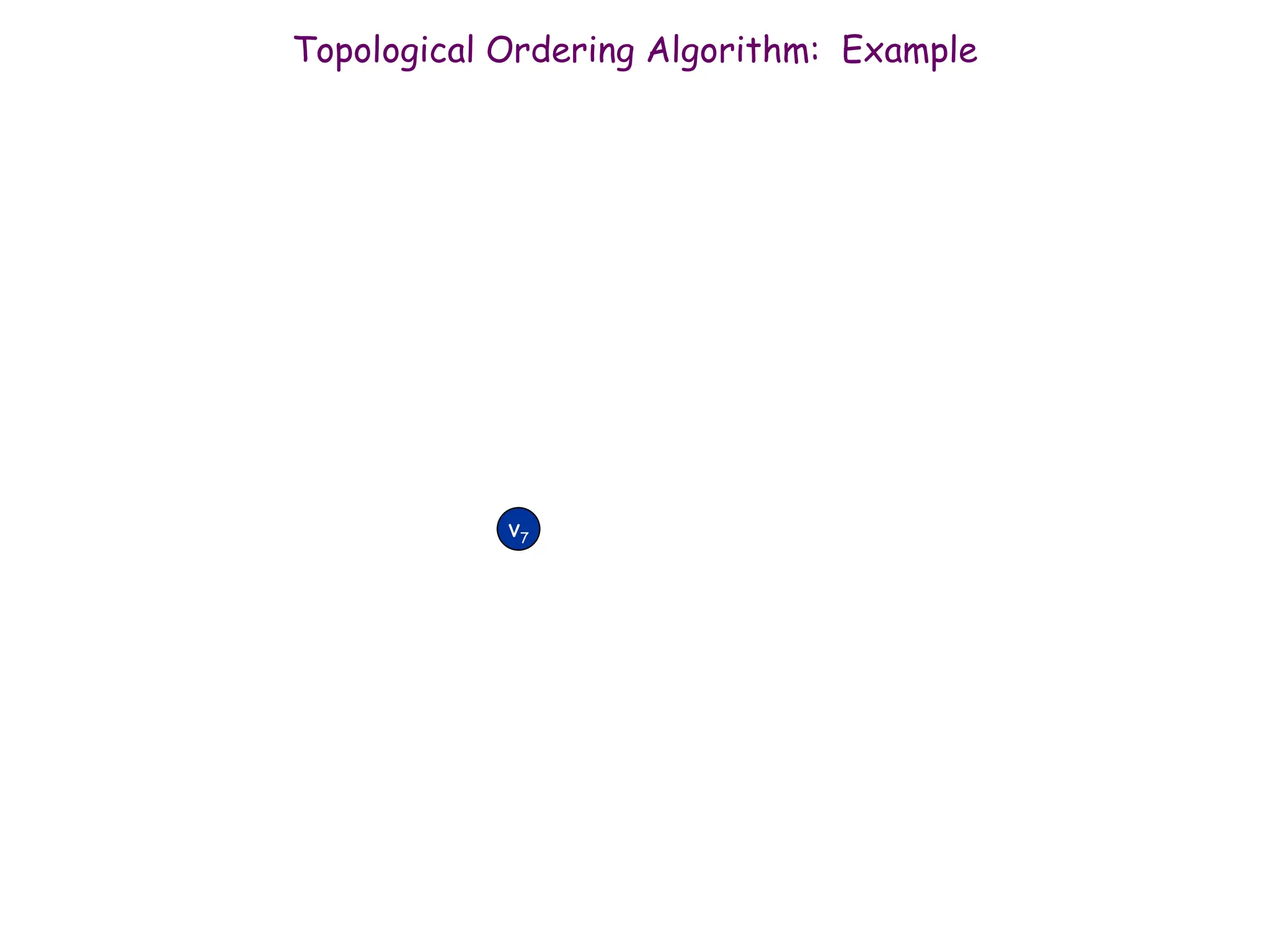
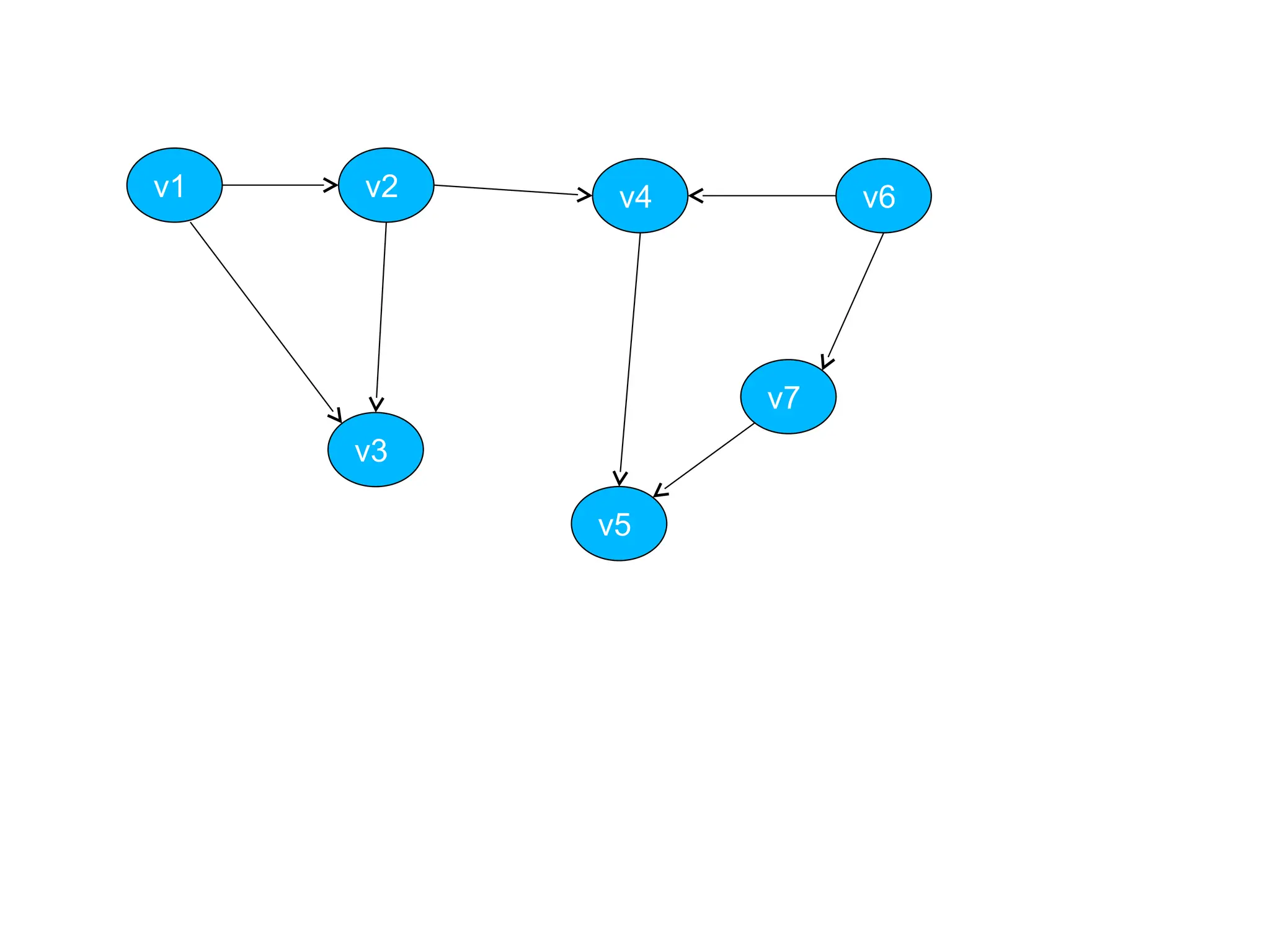
• A topologicalsort of a directed acyclic graph (dag) G = (V, E) is a linear ordering of all its vertices such that if G contains an edge (u, v), then u appears before v in the ordering. Topological sort Topological sort
65.
Topological Sorting Topological Sorting •It is an ordering of vertices of a graph, such that, if there is a path from u to v in the graph then u appears before v in the ordering. • It is clear that a topological ordering is not possible if the graph has a cycle, since for two vertices u and v on the cycle, u precedes v and v precedes u. • It can also be proved that, for a directed acyclic graph, there exists a topological ordering of vertices.
66.
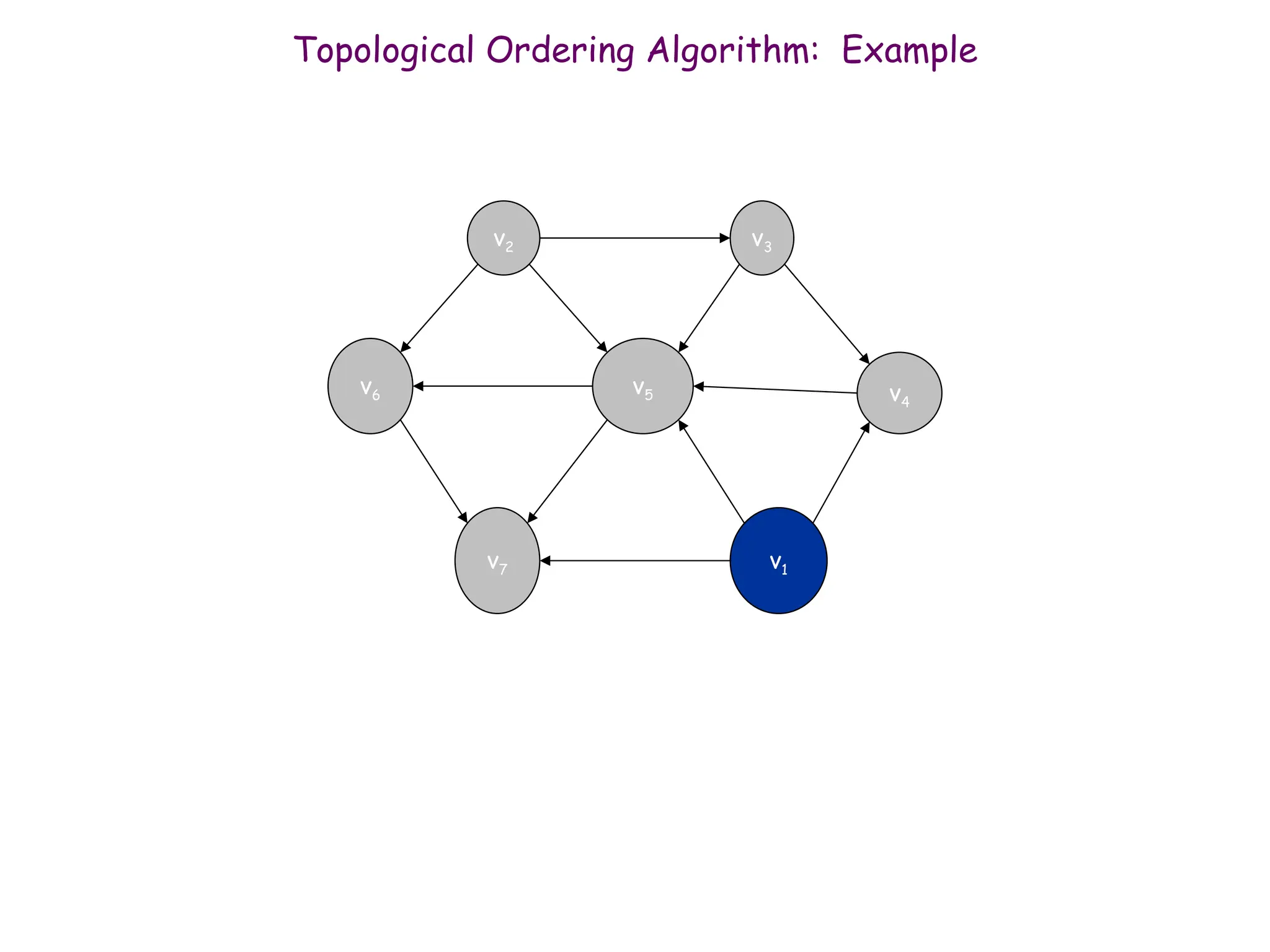
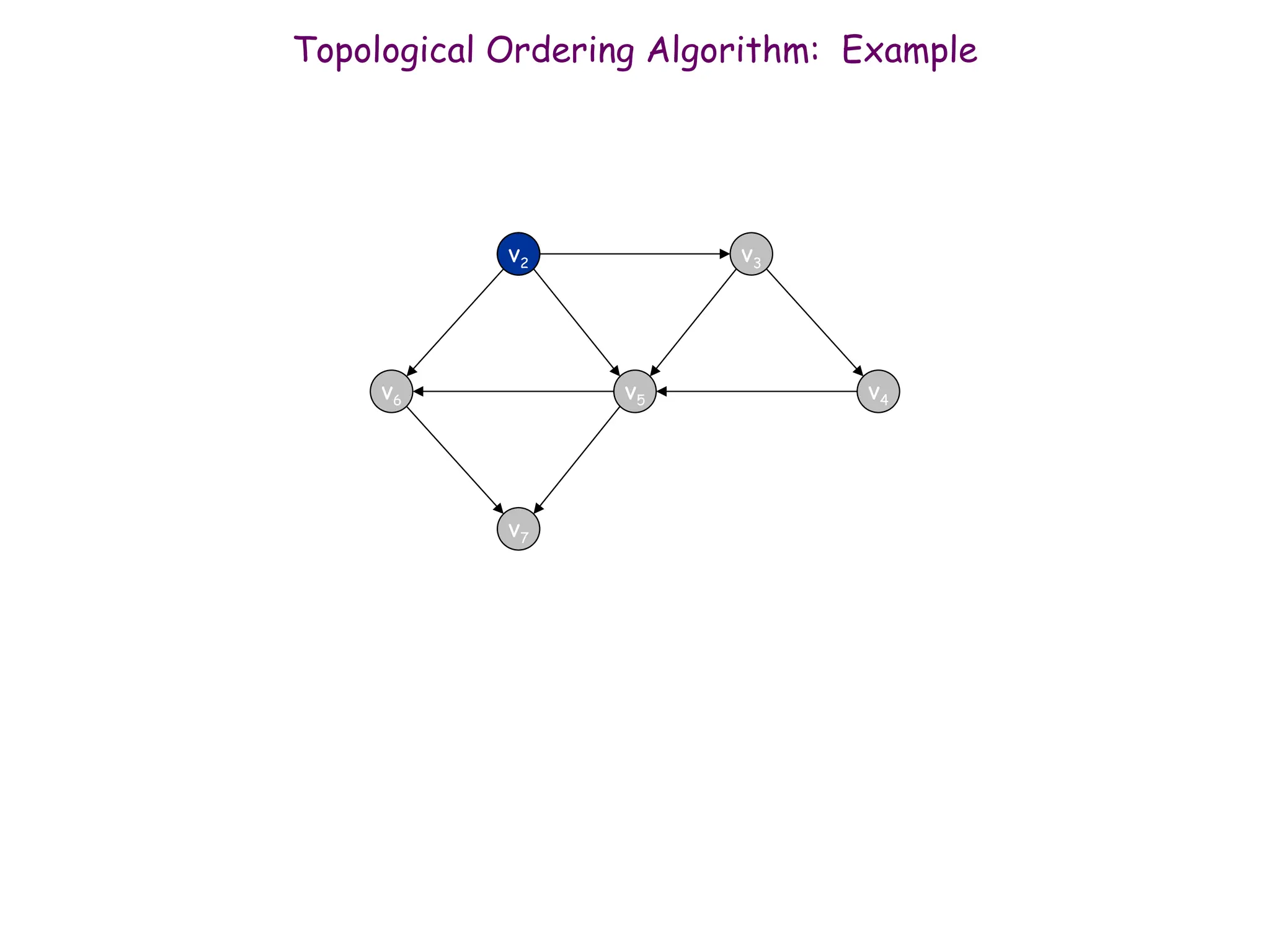
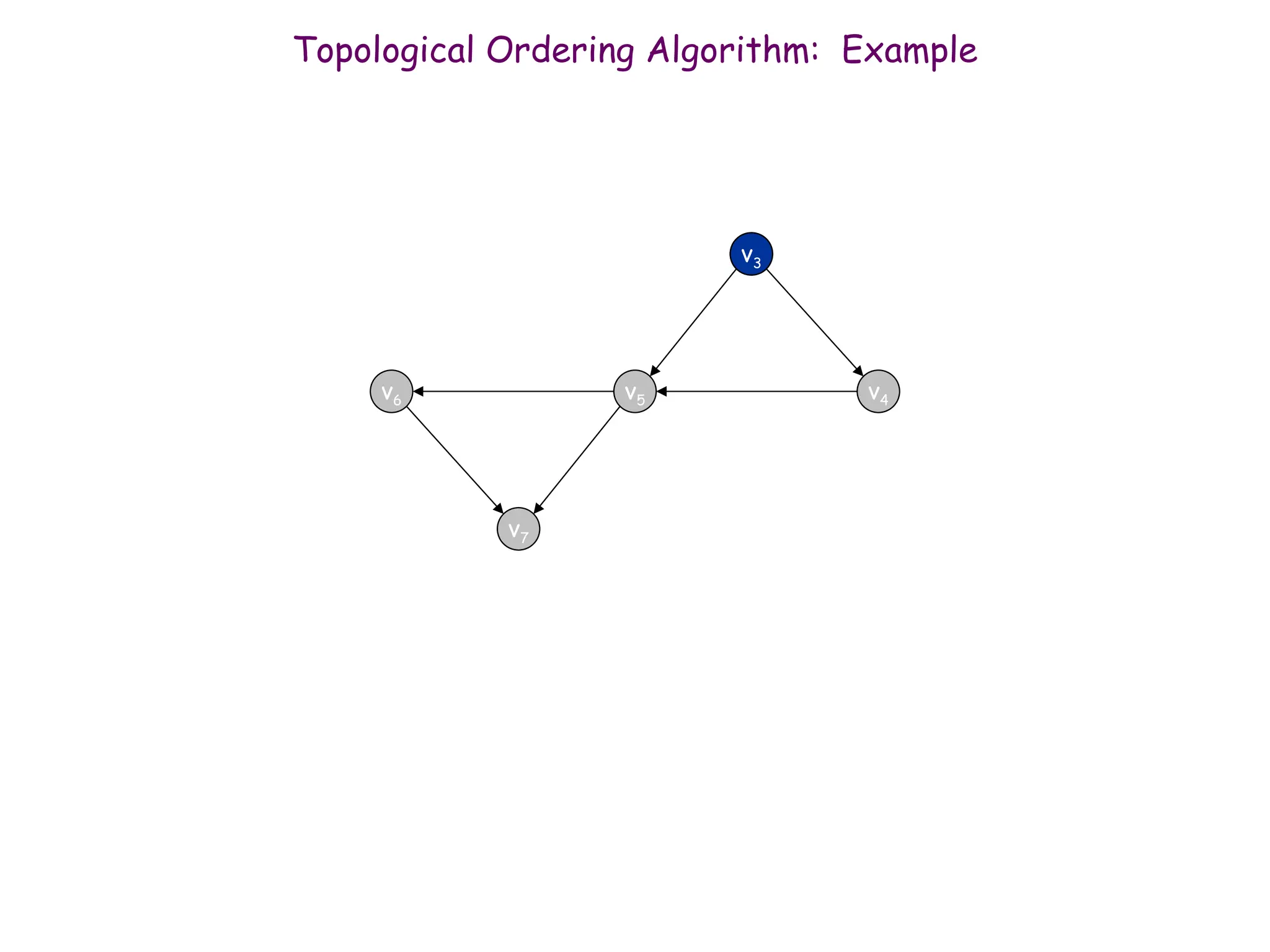
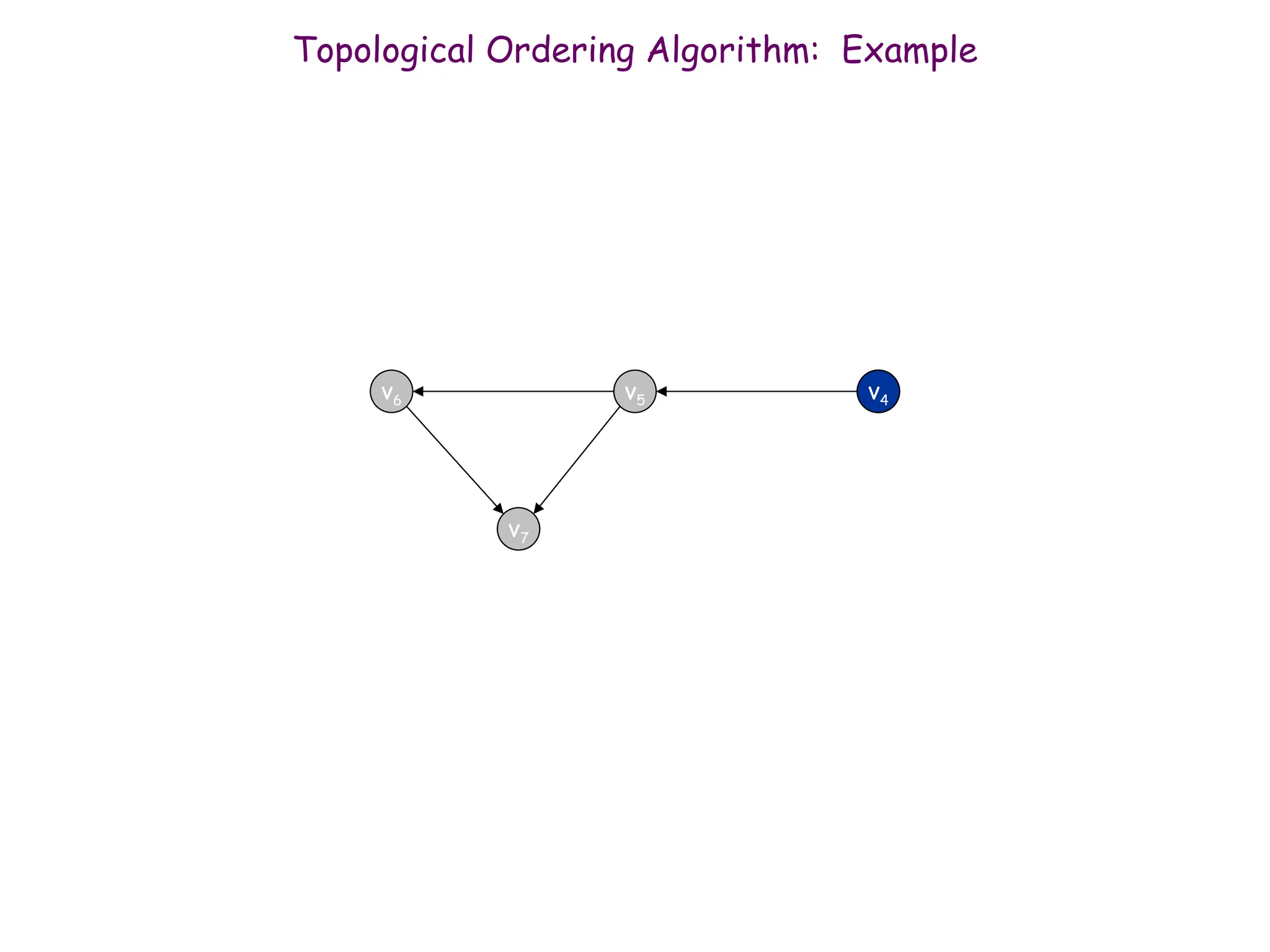
Topological Sorting Algorithm TopologicalSorting Algorithm • A simple algorithm to find a topological ordering is to find out any vertex with indegree zero, that is, a vertex without any predecessor. • We can then add this vertex in an ordering set (initially which is empty) and remove it along with its edge(s) from the graph. • Then we repeat the same strategy on the remaining graph until it is empty. • The topological ordering for a graph is not necessarily unique.
68.
1. Compute theindegrees of all vertices 2. Find a vertex U with indegree 0 and print it (store it in the ordering) 3. If there is no such vertex then there is a cycle and the vertices cannot be ordered. Stop. 4. Remove U and all its edges (U,V) from the graph. 5. Update the indegrees of the remaining vertices. 6. Repeat steps 2 through 4 while there are vertices to be processed.
Strongly connected components •Decomposing a directed graph into its strongly connected component is application of DFS. • Two vertices of a directed graph are in the same component if and only if they are reachable from each other. • i.e if u and v are two vertices in the same component then there is a directed path from u to v as well as from v to u. • If u and v are not in same component then, if there is a directed path from u to v then there is no directed path from v to u.
78.
Algorithm: • A DFS(G)produces a forest of DFS trees. Let C be any strongly connected component of G, Let v be the first vertex on C discovered by DFS and let T be the DFS-tree containing v when DFS_Visit(v) is called all vertices in C are reachable from v along paths containing visible vertices. • DFS_Visit(v) will visit every vertex in C, add it to T as a descendent of v.
79.
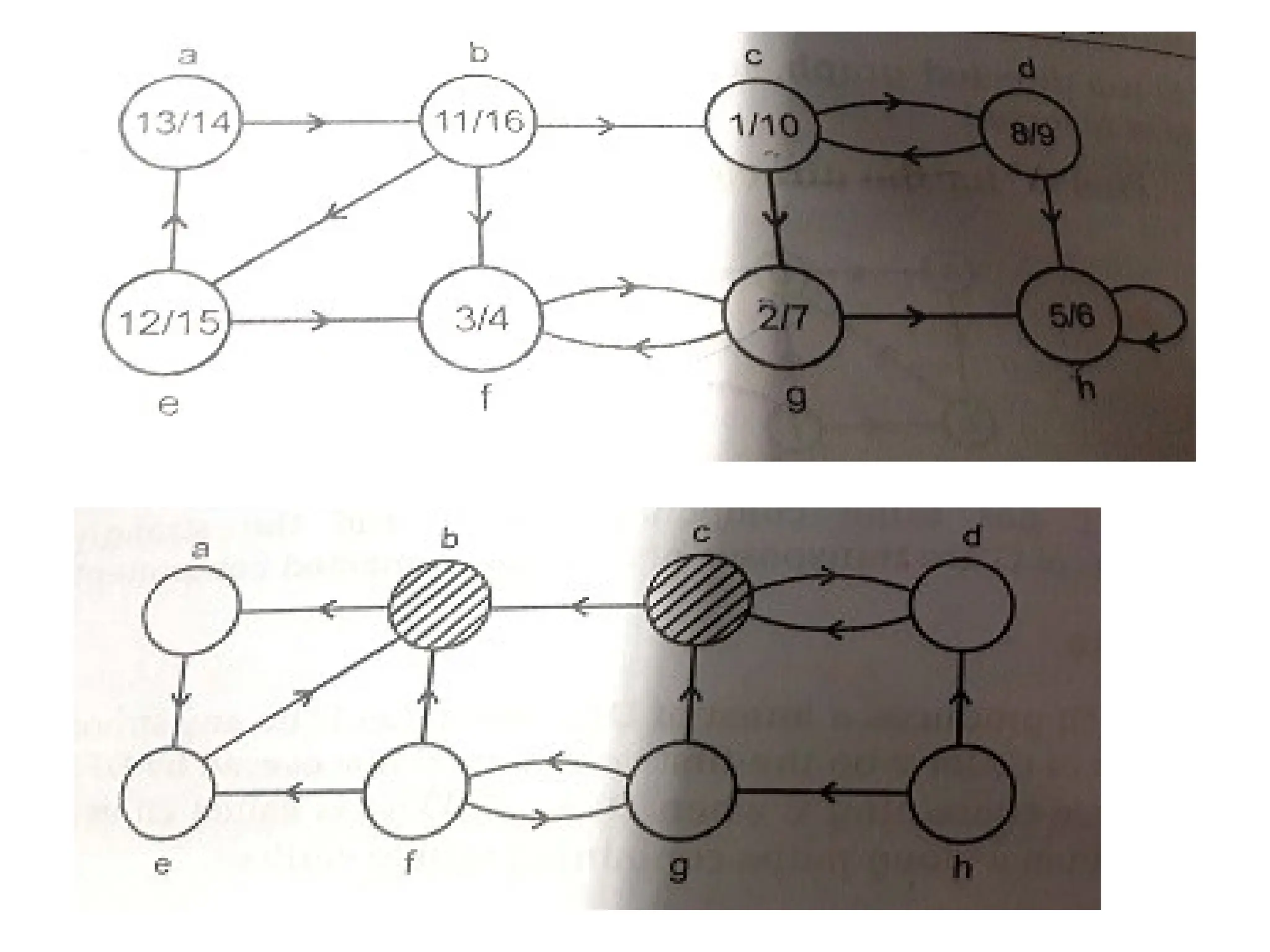
Algorithm Strongly_Conn_Comp(G) { call DFS(G)to compute finishing time for each vertex; Compute transpose of G i.e. GT Call DFS(GT ) but this time consider vertices in order of decreasing finish time; output the vertices of each tree in DFS forest; }
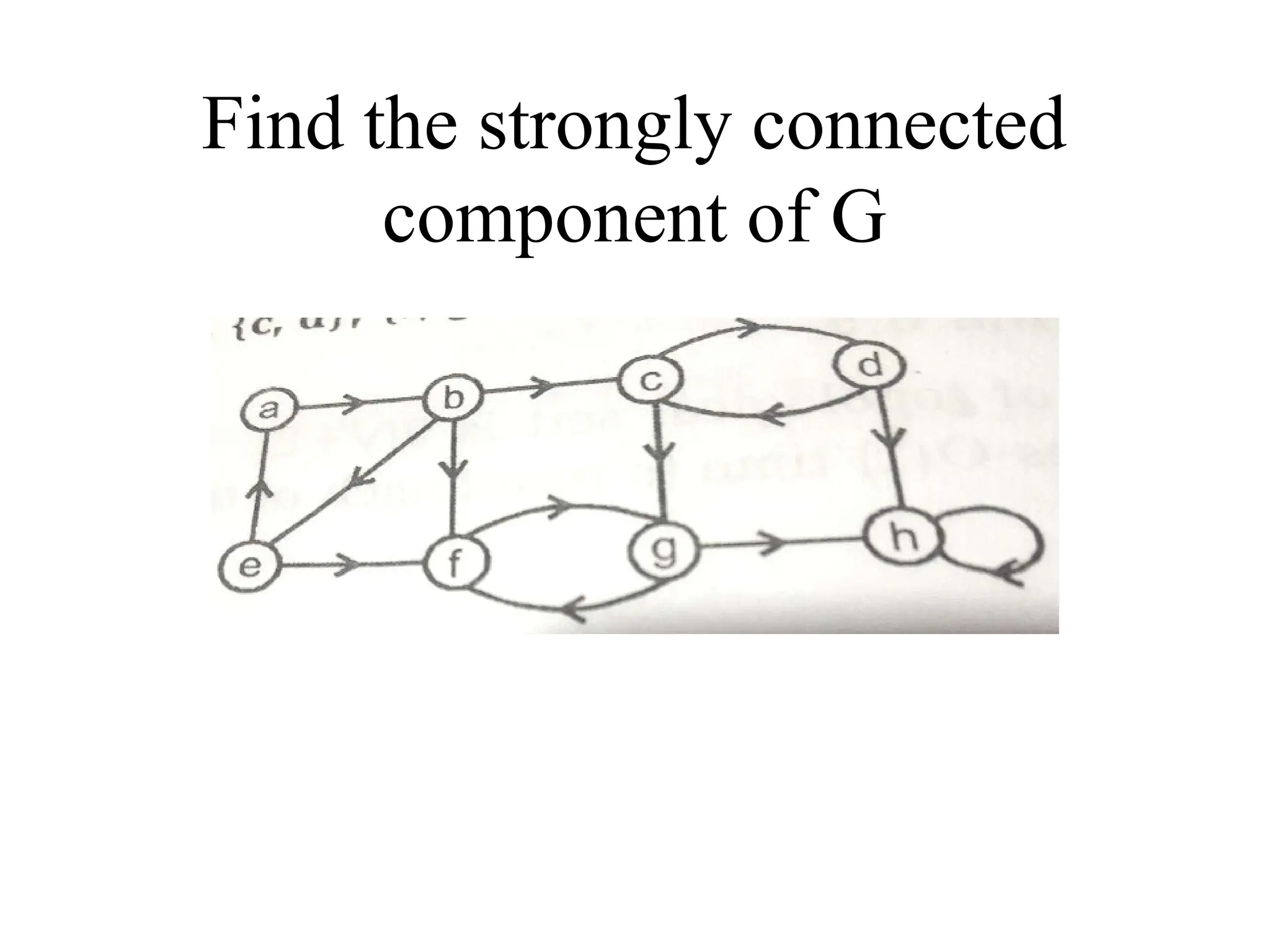
• Step1: callDFS(G) starting with the vertex c. For each vertex inside node we write d[v]/f[v]. • Step2:compute GT • Step3:Call DFS(GT ) but this time consider vertices in order of decreasing finish time. First 16 i.e.vertex b-> component {a, b, e} then start with 10 i.e.vertex c ->component {c, d} then start with 7 i.e. vertex g->component {f, g} the last component is{h} • Step4: output the vertices of each tree in DFS forest. {a, b, e}, {c, d},{f, g} and {h} This algorithm has running time ɵ(V+E)
![Graph Representation • Adjacency list representation of G = (V, E) – An array of V lists, one for each vertex in V – Each list Adj[u] contains all the vertices v such that there is an edge between u and v • Adj[u] contains the vertices adjacent to u (in arbitrary order) – Can be used for both directed and undirected graphs 1 2 5 4 3 2 5 / 1 5 3 4 / 1 2 3 4 5 2 4 2 5 3 / 4 1 2 Undirected graph](https://image.slidesharecdn.com/chapter5decreaseconquer-251116093912-c4cb4eba/75/Design-and-analysis-of-algorithms-_-Decrease-and-Conquer-ppt-9-2048.jpg)
![• The breadth-first-search procedure BFS assumes that the input graph G = (V,E) is represented using adjacency lists. • It maintains several additional data structures with each vertex in the graph. • The color of each vertex u ϵ V is stored in the variable color[u], and the predecessor of u is stored in the variable pi[u]. • If u has no predecessor (e.g. u is s or u has not been discovered), then pi[u] = NIL. • The distance from the source s to vertex u computed by the algorithm is stored in d[u]. BFS(Breadth first search) BFS(Breadth first search)](https://image.slidesharecdn.com/chapter5decreaseconquer-251116093912-c4cb4eba/75/Design-and-analysis-of-algorithms-_-Decrease-and-Conquer-ppt-19-2048.jpg)
![• The algorithm also uses a FIFO queue Q to manage the set of gray vertices. • BFS starts at a given vertex (Source), which is at level 0. • In first stage we will visit all vertices at level 1,all white vertices which are adjacent to source. • These are colored as grey and added to the queue. Source is colored black. • D[v] value of all these vertices is increased by 1. (D[v] is distance of v from source.) • Now visit all vertices at second level. • Once vertex is explored it is colored black and is deleted from queue. • The process stops when queue is empty.](https://image.slidesharecdn.com/chapter5decreaseconquer-251116093912-c4cb4eba/75/Design-and-analysis-of-algorithms-_-Decrease-and-Conquer-ppt-20-2048.jpg)
![• Lines 1-4 paint every vertex white, set d[u] to be infinity for each vertex u, and set the parent of every vertex to be NIL. • Line 5 paints the source vertex s gray, since it is considered to be discovered when the procedure begins. • Line 6 initializes d[s] to be 0, and line 7 sets the predecessor of the source to be NIL. • Lines 8-9 initialize Q to the queue containing just the vertex s. Working of BFS Working of BFS](https://image.slidesharecdn.com/chapter5decreaseconquer-251116093912-c4cb4eba/75/Design-and-analysis-of-algorithms-_-Decrease-and-Conquer-ppt-22-2048.jpg)
![• Besides creating a depth-first forest, DFS also timestamps each vertex. • Each vertex u has 2 timestamps: the first timestamp d[u] records when u is first discovered (and grayed), and the second timestamp f[u] records when the search finishes examining u’s adjacency list (and blackens u). • These timestamps are used in many graph algorithms and are generally helpful in reasoning about the behavior of DFS.](https://image.slidesharecdn.com/chapter5decreaseconquer-251116093912-c4cb4eba/75/Design-and-analysis-of-algorithms-_-Decrease-and-Conquer-ppt-59-2048.jpg)
![• Step1: call DFS(G) starting with the vertex c. For each vertex inside node we write d[v]/f[v]. • Step2:compute GT • Step3:Call DFS(GT ) but this time consider vertices in order of decreasing finish time. First 16 i.e.vertex b-> component {a, b, e} then start with 10 i.e.vertex c ->component {c, d} then start with 7 i.e. vertex g->component {f, g} the last component is{h} • Step4: output the vertices of each tree in DFS forest. {a, b, e}, {c, d},{f, g} and {h} This algorithm has running time ɵ(V+E)](https://image.slidesharecdn.com/chapter5decreaseconquer-251116093912-c4cb4eba/75/Design-and-analysis-of-algorithms-_-Decrease-and-Conquer-ppt-81-2048.jpg)