This document discusses an algorithm for goal location prediction using RGB-D cameras aimed at assisting visually impaired individuals in navigation. It integrates convolutional neural network-based object detection with depth data to accurately identify goal coordinates in a 2D occupancy grid map. Testing results confirm the algorithm's effectiveness in various real-time scenarios, enhancing navigation support for visually impaired users.
![Bulletin of Electrical Engineering and Informatics Vol. 10, No. 5, October 2021, pp. 2811~2820 ISSN: 2302-9285, DOI: 10.11591/eei.v10i5.3170 2811 Journal homepage: http://beei.org Goal location prediction based on deep learning using RGB-D camera Heba Hakim1 , Zaineb Alhakeem2 , Salah Al-Darraji3 1 Department of Computers Engineering, Basrah University, Iraq 2 Department of Communication Engineering, Iraq University College, Iraq 3 Department of Computer Sciences, Basrah University, Iraq Article Info ABSTRACT Article history: Received May 26, 2021 Revised Jul 30, 2021 Accepted Aug 31, 2021 In the navigation system, the desired destination position plays an essential role since the path planning algorithms takes a current location and goal location as inputs as well as the map of the surrounding environment. The generated path from path planning algorithm is used to guide a user to his final destination. This paper presents a proposed algorithm based on RGB-D camera to predict the goal coordinates in 2D occupancy grid map for visually impaired people navigation system. In recent years, deep learning methods have been used in many object detection tasks. So, the object detection method based on convolution neural network method is adopted in the proposed algorithm. The measuring distance between the current position of a sensor and the detected object depends on the depth data that is acquired from RGB-D camera. Both of the object detected coordinates and depth data has been integrated to get an accurate goal location in a 2D map. This proposed algorithm has been tested on various real-time scenarios. The experiments results indicate to the effectiveness of the proposed algorithm. Keywords: Computer vision Deeep learning Depth sensor Object detection Object recognition This is an open access article under the CC BY-SA license. Corresponding Author: Heba Hakim Department of Computers Engineering Basrah University, Iraq-Basrah Email: hebah.hakem@gmail.com 1. INTRODUCTION Person with healthy vision determines his orientation in the surrounding environment, moves from one place to another and distinguishes things and places without any difficult. Unfortunately, visually impaired person (VI) encounters many problems in his daily life. Therefore, numerous navigation assistive devices have been implemented to aim VI person and increase his self-confidence. [1]-[5]. The navigation system means the ability to find a current location, generating the optimal path to the desired destination. In order to achieve a full autonomous navigation system, full information must be provided such as current location, destination location and a map of the surrounding environment. Some navigation systems use simultaneous localization and mapping (SLAM) [6]-[9] approaches to construct 2D or 3D map of their surroundings. These approaches concern with constructing a map of unknown environment depending on the acquired data from the sensor and simultaneously compute the mobility system's position within a map. Some of SLAM algorithms depend on LiDAR (light detection and ranging) [10]-[12] while others based on RGB-D camera [13]-[15]. Since the coordinates of the goal in navigation system is needed, the object detection method with data of a RGB-D camera has been used in this work to achieve that. In recent years, convolution neural networks have been applied with major breakthrough success to recognition, detection, and segmentation of objects in images. Object detection is one of an important task in computer vision that](https://image.slidesharecdn.com/533170-210928020554/75/Goal-location-prediction-based-on-deep-learning-using-RGB-D-camera-1-2048.jpg)
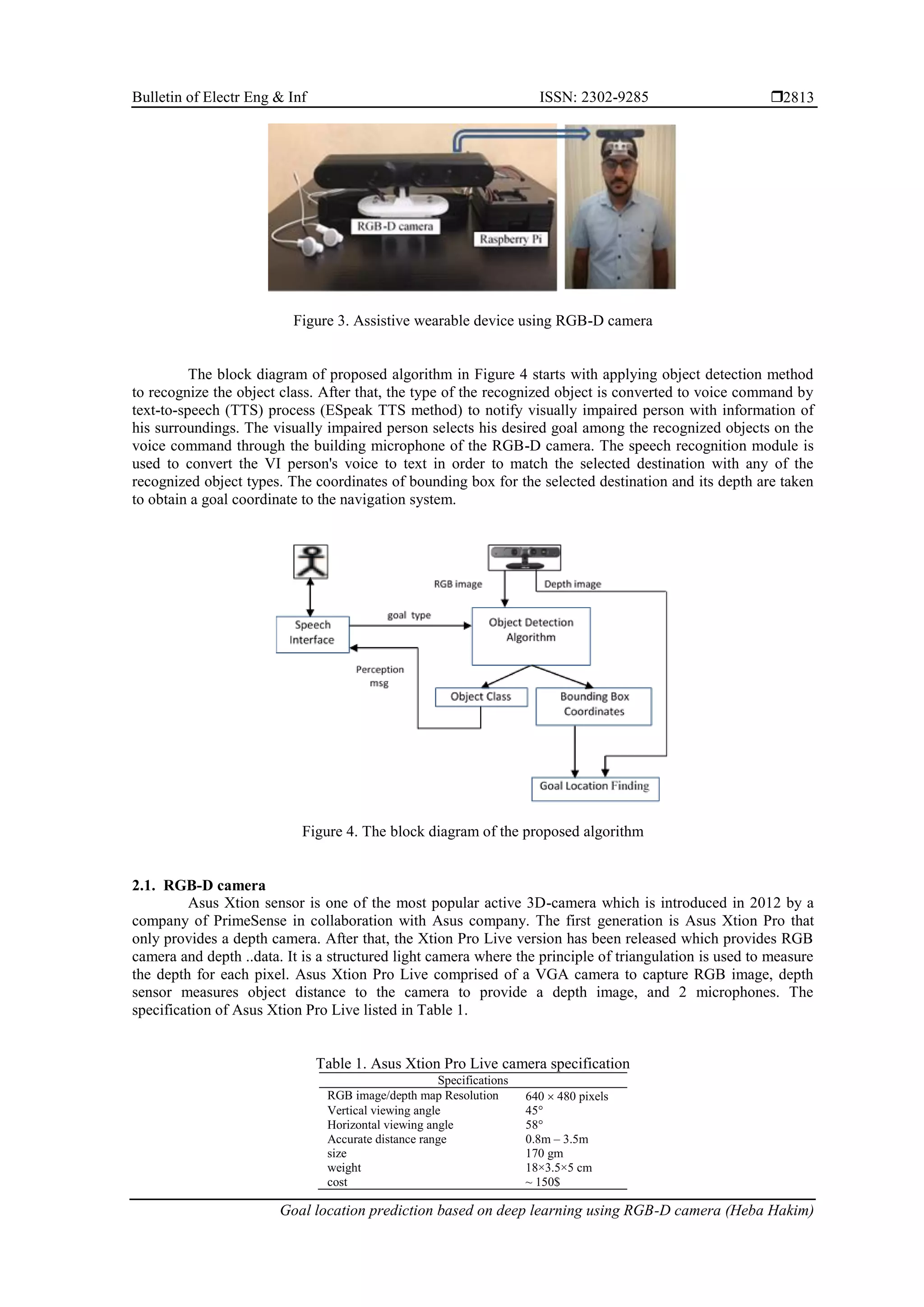
![ ISSN: 2302-9285 Bulletin of Electr Eng & Inf, Vol. 10, No. 5, October 2021 : 2811 – 2820 2812 deals with recognizing objects of a certain class (i.e. car, animal, human) and localizing them in digital image. Now, object detection has widely been used in various real-time applications (i.e. robot vision, autonomous driving). There are many methods of object detection that uses convolution neural networks (CNNs) [16], [17] such as R-CNN [18], fast R-CNN [19], faster R-CNN [20], single shot multibox detector (SSD) [21], you only look once (YOLO) [22]. Figure 1 and Figure 2 provide the comparison on the common object detection methods accuracy and speed, respectively. As shown from these figures, YOLO v2 [23] approach provides a good tradeoff between the precision and speed. So, this approach has been used in our proposed algorithm. Figure 1. The accuracy of common object detection method on pascal VOC dataset Figure 2. The speed of common object detection method on pascal VOC dataset 2. THE PROPOSED SYSTEM Any navigation system required a 2D map, current location of user and final destination to generate a path that will be followed. Both of the current position of user and 2D map of unknown surrounding environment are not a focus of this paper, as there are many SLAM methods available for that. Therefore, to specify the coordinate of a desired goal that was selected by VI person, a proposed algorithm that combines both the results of object detection method based on deep-learning and depth information from RGB-D camera is implemented in this work. The proposed algorithm depends on RGB-D camera mounted on a head as shown in Figure 3 that provides color image and depth data for each pixel in an image. The color image will be used as input to the object detection method (YOLO v2) in order to predict the class of the detected object and the location of the recognized object (i.e. bounding box that gives an object class coordinates) in an image. However, the depth information is used to obtain the distance between the recognized object and user. Both the depth information and coordinates of the recognized object in an image are integrated in order to obtain the location of an object (that is considered as a goal) in a 2D map that is used in the navigation system.](https://image.slidesharecdn.com/533170-210928020554/75/Goal-location-prediction-based-on-deep-learning-using-RGB-D-camera-2-2048.jpg)
![ ISSN: 2302-9285 Bulletin of Electr Eng & Inf, Vol. 10, No. 5, October 2021 : 2811 – 2820 2814 With this sensor, it is possible to acquire the color image with 3 channels (red, green, and blue), each channel is represented by 8 bits, and also depth information in 11 bits for each pixel in RGB-image. The depth data is expressed in millimeters where the value zero represents that there is no depth information at that corresponding pixel. The raw depth map is determined by an IR laser source and an IR camera (CMOS sensor). The IR laser source emits the IR light in the form of a known dot pattern (speckles pattern) by the diffraction grating on the scene in front of the camera and IR camera reads these reflected spackles. After that, the depth sensor processor receives the speckle pattern and computes the depth value by correlating the captured pattern with a stored reference pattern which is located on the plane with a known depth to the sensor. The depth map is the output of the depth sensor processor. To express the object points 3D coordinates, the coordinate system of a depth with its origin is considered at the perspective center of the IR camera as shown in Figure 5. Figure 5. The schematic representation for relation of depth disparity The Z-axis is perpendicular to an image plane in the direction of the object, the X-axis is orthogonal to Z-axis towards the baseline b which represents the distance between the laser projector and IR camera center, and Y-axis is perpendicular to Z and X making a right-handed coordinate system. Assume that the point o of an object is on the reference plane at a depth Zr to the camera and a speckle on an object is captured on the IR camera image plane. The speckle location on the image plane is shifted in the direction of X once the object is displaced far away from/close to the sensor. This shift is measured as disparity (pixel offset) d in the image space. From the triangles similarity, the following can be calculated [24], [25]: 𝐷 𝑏 = 𝑍𝑟−𝑍𝑜 𝑍𝑟 (1) 𝐷 𝑑 = 𝑍𝑜 𝑓 (2) where Zo represents the depth (distance) of a point o in an object space, f is focal length of IR camera, and D denotes the point o displacement in object space. Zo is expressed in (3) by substituting D from (1) into (2): 𝑍𝑜 = 𝑍𝑟 1+ 𝑍𝑟 𝑓𝑏 𝑑𝑓 (3) The Asus Xtion Pro live sensor in our system works mostly for indoor environment, as the depth measurement influenced by the direct sunlight. In fact, this camera is not totally unused in outdoor environments, but it can be used for a cloudy day or a night scene. Asus Xtion Pro Live is with light weight and small size that allows it suitable to be mounted. Also, the USB 2.0 port of Raspberry pi board powers the camera by 5v. It transmits RGB-image and depth data per pixel to the system by using the open source library OpenNI2. OpenNI2 driver is used for sensor interfacing by providing wrappers to many languages including python. To visualize the RGB and depth image, OpenCV is used by opening ' frame-data'. The 2 microphones of Asus Xtion Pro live distributed on the both sides of the sensor. Each microphone operates in audio stream of 16-bit with a 16 kHz sampling rate. In this work, the camera's microphone is used to select a final goal among recognized objects by VI person.](https://image.slidesharecdn.com/533170-210928020554/75/Goal-location-prediction-based-on-deep-learning-using-RGB-D-camera-4-2048.jpg)



![Bulletin of Electr Eng & Inf ISSN: 2302-9285 Goal location prediction based on deep learning using RGB-D camera (Heba Hakim) 2819 (a) (b) Figure 13. Second scenario; (a) real image on 2D map, (b) goal position on 2D map 4. CONCLUSION This paper presents a proposed algorithm of finding goal coordinates on a 2D occupancy map. This proposed algorithm has been implemented in order to use it in the indoor navigation system used to help visually impaired people reach to the desired destination within unknown indoor environments. The proposed algorithm depends on deep-learning based object detection method using RGB-D camera, which runs on a lightweight and low-cost main processing platform. Also, the used sensor has the characteristics of small size, lightweight, and low cost. Thus, it has great potential to be used in a wearable navigation system for a visually impaired person. The results of experimental verified that the proposed algorithm was effective on specifying a desired destination coordinates on a 2D map in a real time. REFERENCES [1] H. Hakim and A. Fadhil, “Indoor low cost Assistive device using 2D SLAM based on LiDAR for Visually Impaired People,” Iraqi Journal of Electrical and Electronic Engineering, vol. 15, no. 2, pp. 115-121. [2] M. M. Islam, M. Sheikh Sadi, K. Z. Zamli, and M. M. Ahmed, “Developing Walking Assistants for Visually Impaired People: A Review,” IEEE Sensors Journal, vol. 19, no. 8, pp. 2814-2828, 2019, doi: 10.1109/JSEN.2018.2890423. [3] H. Hakim and A. Fadil, “Navigation system for visually impaired people based on RGB-D camera and ultrasonic sensor,” ACM International Conference on Information and Communication Technology, pp. 172-177, 2019, doi: 10.1145/3321289.3321303. [4] S. Real and A. Araujo, “Navigation Systems for the Blind and Visually Impaired Past Work, Challenges, and Open Problems,” Sensors, vol. 19, no. 15, pp. 1-20, 2019, doi: 10.3390/s19153404. [5] H. Hakim and A. Fadil, “Indoor Wearable Navigation System Using 2D SLAM Based on RGB-D Camera for Visually Impaired People,” Springer series: Advances in Intelligent Systems and Computing, vol. 1292, pp. 661-672, 2020. [6] H. Durrant-Whyte and T. Bailey, “Simultaneous localization and mapping: part I,” IEEE Robotics & Automation Magazine, vol. 13, no. 2, pp. 99-110, June 2006, doi: 10.1109/MRA.2006.1638022. [7] T. Bailey and H. Durrant-Whyte, “Simultaneous localization and mapping (SLAM): part II,” IEEE Robotics & Automation Magazine, vol. 13, no. 3, pp. 108-117, 2006, doi: 10.1109/MRA.2006.1678144. [8] C. Cadena, et al., “Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust- Perception Age,” IEEE Transactions on Robotics, vol. 32, no. 6, pp. 1309-1332, 2016, doi: 10.1109/TRO.2016.2624754. [9] M. W. M. G. Dissanayake, P. Newman, S. Clark, H. F. Durrant-Whyte, and M. Csorba, “A solution to the simultaneous localization and map building (SLAM) problem,” IEEE Transactions on Robotics and Automation, vol. 17, no. 3, pp. 229-241, June 2001, doi: 10.1109/70.938381. [10] K. Konolige, G. Grisetti, R. Kümmerle, W. Burgard, B. Limketkai, and R. Vincent, “Efficient Sparse Pose Adjustment for 2D mapping,” IEEE/RSJ International Conference on Intelligent Robots and Systems, 2010, pp. 22- 29, doi: 10.1109/IROS.2010.5649043. [11]B. Steux and O. E. Hamzaoui, “tinySLAM: A SLAM algorithm in less than 200 lines C-language program,” 11th International Conference on Control Automation Robotics & Vision, 2010, pp. 1975-1979, doi: 10.1109/ICARCV.2010.5707402. [12] S. Kohlbrecher, O. von Stryk, J. Meyer and U. Klingauf, “A flexible and scalable SLAM system with full 3D motion estimation,” IEEE International Symposium on Safety, Security, and Rescue Robotics, 2011, pp. 155-160, doi: 10.1109/SSRR.2011.6106777.](https://image.slidesharecdn.com/533170-210928020554/75/Goal-location-prediction-based-on-deep-learning-using-RGB-D-camera-9-2048.jpg)
![ ISSN: 2302-9285 Bulletin of Electr Eng & Inf, Vol. 10, No. 5, October 2021 : 2811 – 2820 2820 [13] F. Endres, J. Hess, J. Sturm, D. Cremers and W. Burgard, “3-D Mapping With an RGB-D Camera,” IEEE Transactions on Robotics, vol. 30, no. 1, pp. 177-187, Feb. 2014, doi: 10.1109/TRO.2013.2279412. [14] Mur-Artal, J. D. Tardós, “ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras,” IEEE Transactions on Robotics, vol. 33, no. 5, pp. 1255-1262, 2017, doi: 10.1109/TRO.2017.2705103. [15] M. Labbe, F. Michaud, “RTAB-Map As an Open-source Lidar and Visual Simultaneous Localization and Mapping Library for Large-scale and Long-term Online Operation,” Journal of Field Robotics, vol. 36, no. 2, pp. 416-446, 2018, doi: 10.1002/rob.21831. [16] H. Hakim A. Fadil, “Survey Convolution Neural Networks in Object Detectrion,” Journal of Physics: Conference Series, no. 1804, pp. 1-19, 2021, doi: 10.1088/1742-6596/1804/1/012095. [17] N. Aloysius and M. Geetha, “A review on deep convolutional neural networks,” International Conference on Communication and Signal Processing ICCSP, 2017, pp. 0588-0592, doi: 10.1109/ICCSP.2017.8286426. [18] R. Girshick and J. Donahue, T. Darrell, and J. Malik, “Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation,” IEEE International Conference on Computer vision an Pattern Recognition, 2014, pp. 580-587. [19] R. Girshick, “Fast r-cnn,” IEEE International Conference on Computer Vision ICCV, 2015, pp. 1440-1448. [20] S. Ren, K. He, R. Girshick, and J. Sun, “Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 39, no. 6, pp. 1137-1149, 2017, doi: 10.1109/TPAMI.2016.2577031. [21] W. Liu, D. Anguelov, D. Erhan, C. Szegedy, S. Reed, C. Fu, and A. C. Berg, “SSD: Single Shot MultiBox Detector,” European Conference on Computer Vision, arXiv:1512.02325v5, 2016, pp. 21-37. [22] J. Redmon, S. Divvala, R. Girshick, and A. Farhadi, “You Only Look Once: Unified, Real-Time Object Detection,” IEEE International Conference on Computer Vision and Pattern Recognition CVPR, 2016, pp.779-788. [23] J. Redmon and A. Farhadi, “YOLO9000: better, faster, stronger,” IEEE International Conference on Computer Vision and Pattern Recognition CVPR, 2017, pp. 7263-7271. [24] T. Jia, Z. Zhou, and H. Gao, “Depth Measurement Based on Infrared Coded Structured Light,” Hindawi Publishing Corporation Journal of Sensors, vol. 2014, ID. 852621, pp. 1-9, 2014, doi: 10.1155/2014/852621. [25] K. Khoshelham and S. Elberink, “Accuracy and Resolution of Kinect Depth Data for Indoor Mapping Applications,” Sensors, vol. 12, no. 2, pp. 1437-1454, 2012, doi: 10.3390/s120201437.](https://image.slidesharecdn.com/533170-210928020554/75/Goal-location-prediction-based-on-deep-learning-using-RGB-D-camera-10-2048.jpg)