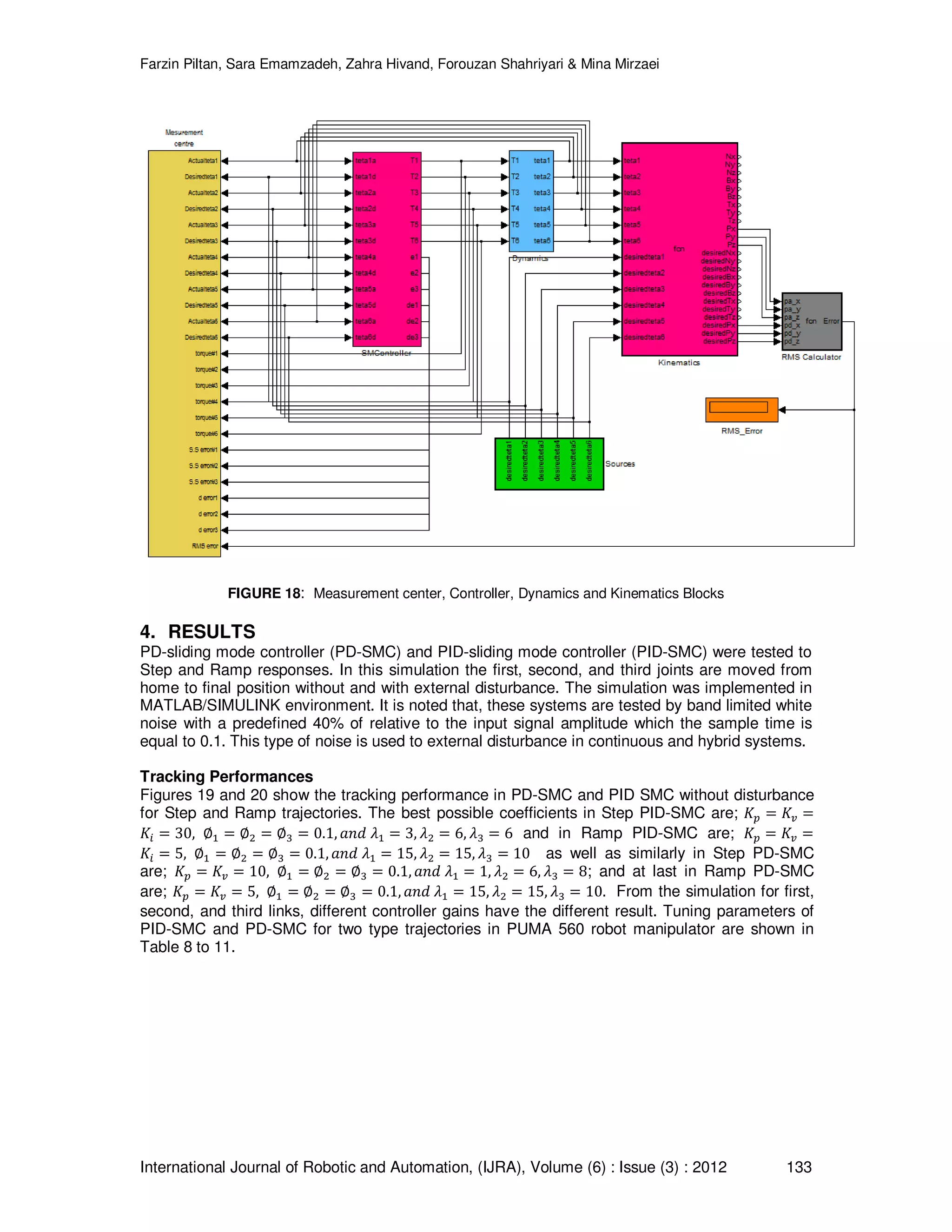
This paper presents MATLAB/Simulink implementations of the PUMA 560 robot manipulator's position control using nonlinear sliding mode control methods. It aims to enhance robotics education at both graduate and undergraduate levels by providing simulation models for control methodologies. The study emphasizes the significance of kinematics and dynamics in robot control, highlighting challenges like uncertainty and chattering in control performance.
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 107 1. INTRODUCTION Computer modeling, simulation and implementation tools have been widely used to support and develop nonlinear control, robotics, and MATLAB/SIMULINK courses. MATLAB with its toolboxes such as SIMULINK [1] is one of the most accepted software packages used by researchers to enhance teaching the transient and steady-state characteristics of control and robotic courses [3_7]. In an effort to modeling and implement robotics, nonlinear control and advanced MATLAB/SIMULINK courses at research and development SSP Co., authors have developed MATLAB/SIMULINK models for learn the basic information in field of nonlinear control and industrial robot manipulator [8, 9]. The international organization defines the robot as “an automatically controlled, reprogrammable, multipurpose manipulator with three or more axes.” The institute of robotic in The United States Of America defines the robot as “a reprogrammable, multifunctional manipulator design to move material, parts, tools, or specialized devices through various programmed motions for the performance of variety of tasks”[1]. Robot manipulator is a collection of links that connect to each other by joints, these joints can be revolute and prismatic that revolute joint has rotary motion around an axis and prismatic joint has linear motion around an axis. Each joint provides one or more degrees of freedom (DOF). From the mechanical point of view, robot manipulator is divided into two main groups, which called; serial robot links and parallel robot links. In serial robot manipulator, links and joints is serially connected between base and final frame (end-effector). Parallel robot manipulators have many legs with some links and joints, where in these robot manipulators base frame has connected to the final frame. Most of industrial robots are serial links, which in ݊ degrees of freedom serial link robot manipulator the axis of the first three joints has a known as major axis, these axes show the position of end-effector, the axis number four to six are the minor axes that use to calculate the orientation of end-effector and the axis number seven to ݊ use to reach the avoid the difficult conditions (e.g., surgical robot and space robot manipulator). Kinematics is an important subject to find the relationship between rigid bodies (e.g., position and orientation) and end-effector in robot manipulator. The mentioned topic is very important to describe the three areas in robot manipulator: practical application such as trajectory planning, essential prerequisite for some dynamic description such as Newton’s equation for motion of point mass, and control purposed therefore kinematics play important role to design accurate controller for robot manipulators. Robot manipulator kinematics is divided into two main groups: forward kinematics and inverse kinematics where forward kinematics is used to calculate the position and orientation of end-effector with given joint parameters (e.g., joint angles and joint displacement) and the activated position and orientation of end-effector calculate the joint variables in Inverse Kinematics[6]. Dynamic modeling of robot manipulators is used to describe the behavior of robot manipulator such as linear or nonlinear dynamic behavior, design of model based controller such as pure sliding mode controller and pure computed torque controller which design these controller are based on nonlinear dynamic equations, and for simulation. The dynamic modeling describes the relationship between joint motion, velocity, and accelerations to force/torque or current/voltage and also it can be used to describe the particular dynamic effects (e.g., inertia, coriolios, centrifugal, and the other parameters) to behavior of system[1]. The Unimation PUMA 560 serially links robot manipulator was used as a basis, because this robot manipulator is widely used in industry and academic. It has a nonlinear and uncertain dynamic parameters serial link 6 degrees of freedom (DOF) robot manipulator. A nonlinear robust controller design is major subject in this work [1-15]. Controller is a device which can sense information from linear or nonlinear system (e.g., robot manipulator) to improve the systems performance [3]. The main targets in designing control systems are stability, good disturbance rejection, and small tracking error[5]. Several industrial robot manipulators are controlled by linear methodologies (e.g., Proportional-Derivative (PD) controller, Proportional- Integral (PI) controller or Proportional- Integral-Derivative (PID) controller), but when robot manipulator works with various payloads and have uncertainty in dynamic models this technique has limitations. From the control point of view, uncertainty is divided into two main groups: uncertainty in unstructured inputs (e.g., noise, disturbance) and uncertainty in structure dynamics (e.g., payload, parameter variations). In some applications robot](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-2-2048.jpg)
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 108 manipulators are used in an unknown and unstructured environment, therefore strong mathematical tools used in new control methodologies to design nonlinear robust controller with an acceptable performance (e.g., minimum error, good trajectory, disturbance rejection. Sliding mode controller is a powerful nonlinear robust controller under condition of partly uncertain dynamic parameters of system [7]. This controller is used to control of highly nonlinear systems especially for robot manipulators. Chattering phenomenon and nonlinear equivalent dynamic formulation in uncertain dynamic parameter are two main drawbacks in pure sliding mode controller [20]. The main reason to opt for this controller is its acceptable control performance in wide range and solves two most important challenging topics in control which names, stability and robustness [7, 17-20]. Sliding mode controller is divided into two main sub controllers: discontinues controllerሺ࣎ࢊ࢙ሻ and equivalent controllerሺ࣎ࢋሻ. Discontinues controller causes an acceptable tracking performance at the expense of very fast switching. Conversely in this theory good trajectory following is based on fast switching, fast switching is caused to have system instability and chattering phenomenon. Fine tuning the sliding surface slope is based on nonlinear equivalent part [1, 6]. However, this controller is used in many applications but, pure sliding mode controller has two most important challenges: chattering phenomenon and nonlinear equivalent dynamic formulation in uncertain parameters[20]. Chattering phenomenon (Figure 1) can causes some problems such as saturation and heat the mechanical parts of robot manipulators or drivers. To reduce or eliminate the chattering, various papers have been reported by many researchers which classified into two most important methods: boundary layer saturation method and estimated uncertainties method [1]. FIGURE 1: Chattering as a result of imperfect control switching [1]. In boundary layer saturation method, the basic idea is the discontinuous method replacement by saturation (linear) method with small neighborhood of the switching surface. This replacement caused to increase the error performance against with the considerable chattering reduction. Slotine and Sastry have introduced boundary layer method instead of discontinuous method to reduce the chattering[21]. Slotine has presented sliding mode with boundary layer to improve the industry application [22]. Palm has presented a fuzzy method to nonlinear approximation instead of linear approximation inside the boundary layer to improve the chattering and control the result performance[23]. Moreover, Weng and Yu improved the previous method by using a new method in fuzzy nonlinear approximation inside the boundary layer and adaptive method[24]. As mentioned [24]sliding mode fuzzy controller (SMFC) is fuzzy controller based on sliding mode technique to most exceptional stability and robustness. Sliding mode fuzzy controller has the two most important advantages: reduce the number of fuzzy rule base and increase robustness and stability. Conversely sliding mode fuzzy controller has the above advantages, define the sliding surface slope coefficient very carefully is the main disadvantage of this controller. Estimated uncertainty method used in term of uncertainty estimator to compensation of the system uncertainties. It has been used to solve the chattering phenomenon and also nonlinear equivalent dynamic. If estimator has an acceptable performance to compensate the uncertainties, the chattering is reduced. Research on estimated uncertainty to reduce the chattering is significantly growing as their applications such as industrial automation and robot manipulator. For instance, the applications of artificial intelligence, neural networks and fuzzy logic on](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-3-2048.jpg)
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 109 estimated uncertainty method have been reported in [25-28]. Wu et al. [30] have proposed a simple fuzzy estimator controller beside the discontinuous and equivalent control terms to reduce the chattering. Their design had three main parts i.e. equivalent, discontinuous and fuzzy estimator tuning part which has reduced the chattering very well. Elmali et al. [27]and Li and Xu [29] have addressed sliding mode control with perturbation estimation method (SMCPE) to reduce the classical sliding mode chattering. This method was tested for the tracking control of the first two links of a SCARA type HITACHI robot. In this technique, digital controller is used to increase the system’s response quality. However this controller’s response is very fast and robust but it has chattering phenomenon. Design a robust controller for robot manipulator is essential because robot manipulator has highly nonlinear dynamic parameters. This paper is organized as follows: In section 2, dynamic and kinematics formulation of robot manipulator and methodology of implemented of them are presented. Detail of classical SMC and MATLAB/SIMULINK implementation of this controller is presented in section 3. In section 4, the simulation result is presented and finally in section 5, the conclusion is presented. 2. PUMA 560 ROBOT MANIPULATOR FORMULATION: DYNAMIC FORMULATION OF ROBOTIC MANIPULATOR AND KINEMATICS FORMULATION OF ROBOTIC MANIPULATOR Rigid-body kinematics: one of the main concern among robotic and control engineers is positioning the manipulator’s End-effector to the most accurate place and transparent the effect of disturbance and errors which will affect on manipulator’s final result. As a matter of fact, controlling manipulators are hard and expensive because they are multi-input, multi-output, time variant and non-linear, so it has been a topic for researchers to design the most sufficient controller to help the manipulator to achieve to the desired expectation under any circumstance. PUMA 560 is a good instance for manipulators, because it is widely used in both industry and academic, and the dynamic parameters for this robot arm have been identified and documented in literature. One of the main parts of a manipulator’s controller is its kinematics which can be divided into two parts; forward kinematics and inverse kinematics. Implementation of inverse kinematic is hard and expensive. In this work we will aim on implementation of PUMA 560 robot manipulator kinematics. Study of robot manipulators is classified into two main groups: kinematics and dynamics. Calculate the relationship between rigid bodies and end-effector without any forces is called Robot manipulator Kinematics. Study of this part is pivotal to calculate accurate dynamic part, to design with an acceptable performance controller, and in real situations and practical applications. As expected the study of manipulator kinematics is divided into two main parts: forward and inverse kinematics. Forward kinematics has been used to find the position and orientation of task (end-effector) frame when angles and/or displacement of joints are known. Inverse kinematics has been used to find possible joints variable (displacements and angles) when all position and orientation of end-effector be active [1]. The main target in forward kinematics is calculating the following function: ࢸሺࢄ, ሻ ൌ (1) Where ߖሺ. ሻ א ܴ is a nonlinear vector function, ܺ ൌ ሾܺଵ,ܺଶ, … … , ܺሿ் is the vector of task space variables which generally endeffector has six task space variables, three position and three orientation, ݍ ൌ ሾݍଵ,ݍଶ, … . , ݍሿ் is a vector of angles or displacement, and finally ݊ is the number of actuated joints. The Denavit-Hartenberg (D-H) convention is a method of drawing robot manipulators free body diagrams. Denvit-Hartenberg (D-H) convention study is necessary to calculate forward kinematics in serial robot manipulator. The first step to calculate the serial link robot manipulator forward kinematics is link description; the second step is finding the D-H convention after the frame attachment and finally finds the forward kinematics. Forward kinematics is a 4×4 matrix which 3×3 of them shows the rotation matrix, 3×1 of them is shown the position vector and last](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-4-2048.jpg)
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 110 four cells are scaling factor[1, 6]. Wu has proposed PUMA 560 robot arm kinematics based on accurate analysis [9]. The inverse kinematics problem is calculation of joint variables (i.e., displacement and angles), when position and orientation of end-effector to be known. In other words, the main target in inverse kinematics is to calculate ݍ ൌ ݄ିଵ ሺܺሻ, where ݍ is joint variable, ݍ ൌ[ݍଵ, ݍଶ, … . . , ݍሿ, and ܺ are position and orientation of endeffector, X=[X,ܻ, ܼ, , ߠ, ߖሿ. In general analysis the inverse kinematics of robot manipulator is difficult because, all nonlinear equations solutions are not unique (e.g., redundant robot, elbow-up/elbow-down rigid body), and inverse kinematics are different for different types of robots. In serial links robot manipulators, equations of inverse kinematics are classified into two main groups: numerical solutions and closed form solutions. Most of researcher works on closed form solutions of inverse kinematics with different methods, such as inverse transform, screw algebra, dual matrix, iterative, geometric approach and decoupling of position and orientation[1, 6]. Research on the Inverse Kinematics robot manipulator PUMA 560 series, like in some applications has been working. For instance, Zhang and Paul have worked on particular way of robot kinematics solution to reduce the computation[10]. Kieffer has proposed a simple iterative solution to computation of inverse kinematics[11]. Ahmad and Guez are solved the robot manipulator inverse kinematics by neural network hybrid method which this method is combining the advantages of neural network and iterative methods [12]. Singularity is a location in the robot manipulator’s workspace which the robot manipulator loses one or more degrees of freedom in Cartesian space. Singularities are one of the most important challenges in inverse kinematics which Cheng et al., have proposed a method to solve this problem [13]. A systematic Forward Kinematics of robot manipulator solution is the main target of this part. The first step to compute Forward Kinematics (F.K) of robot manipulator is finding the standard D-H parameters. Figure 2 shows the schematic of the PUMA 560 robot manipulator. The following steps show the systematic derivation of the standard D-H parameters. 1. Locate the robot arm 2. Label joints 3. Determine joint rotation or translation (ߠ ݎ ݀ሻ 4. Setup base coordinate frames. 5. Setup joints coordinate frames. 6. Determineߙ, thatߙ, link twist, is the angle between ܼ and ܼାଵ about an ܺ. 7. Determine ݀ and ܽ , that ܽ, link length, is the distance between ܼ and ܼାଵ along ܺ. ݀, offset, is the distance between ܺିଵ and ܺ along ܼ axis. 8. Fill up the D-H parameters table. Table 1 shows the standard D-H parameters for n DOF robot manipulator. The second step to compute Forward kinematics for robot manipulator is finding the rotation matrix (ܴ ). The rotation matrix fromሼܨሽ to ሼܨିଵሽ is given by the following equation; ࡾ ି ൌ ࢁሺࣂሻࢂሺࢻሻ (2) Where ܷሺఏሻ is given by the following equation [1]; ࢁሺࣂሻ ൌ ܛܗ܋ሺࣂሻ െ ܖܑܛሺࣂሻ ܖܑܛሺࣂሻ ܛܗ܋ሺࣂሻ ൩ (3) and ܸሺఈሻ is given by the following equation [1];](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-5-2048.jpg)
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 111 ࢂሺࣂሻ ൌ ܛܗ܋ሺࣂሻ െ ܖܑܛሺࣂሻ ܖܑܛሺࣂሻ ܛܗ܋ሺࣂሻ ൩ (4) So (ܴ ) is given by [1] ࡾ ൌ ሺࢁࢂሻሺࢁࢂሻ … … … ሺࢁࢂሻ (5) Link i ࣂ(rad) ࢻ(rad) ࢇ(m) ࢊ(m) 1 ࣂ ࢻ ࢇ ࢊ 2 ࣂ ࢻ ࢇ ࢊ 3 ࣂ ࢻ ࢇ ࢊ ........ ...... ....... ....... ........ ........ ....... ....... ........ ........ n ࣂ ࢇ ࢊ TABLE 1: The Denavit Hartenberg parameter FIGURE 2: D-H notation for a six-degrees-of-freedom PUMA 560 robot manipulator[2]](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-6-2048.jpg)
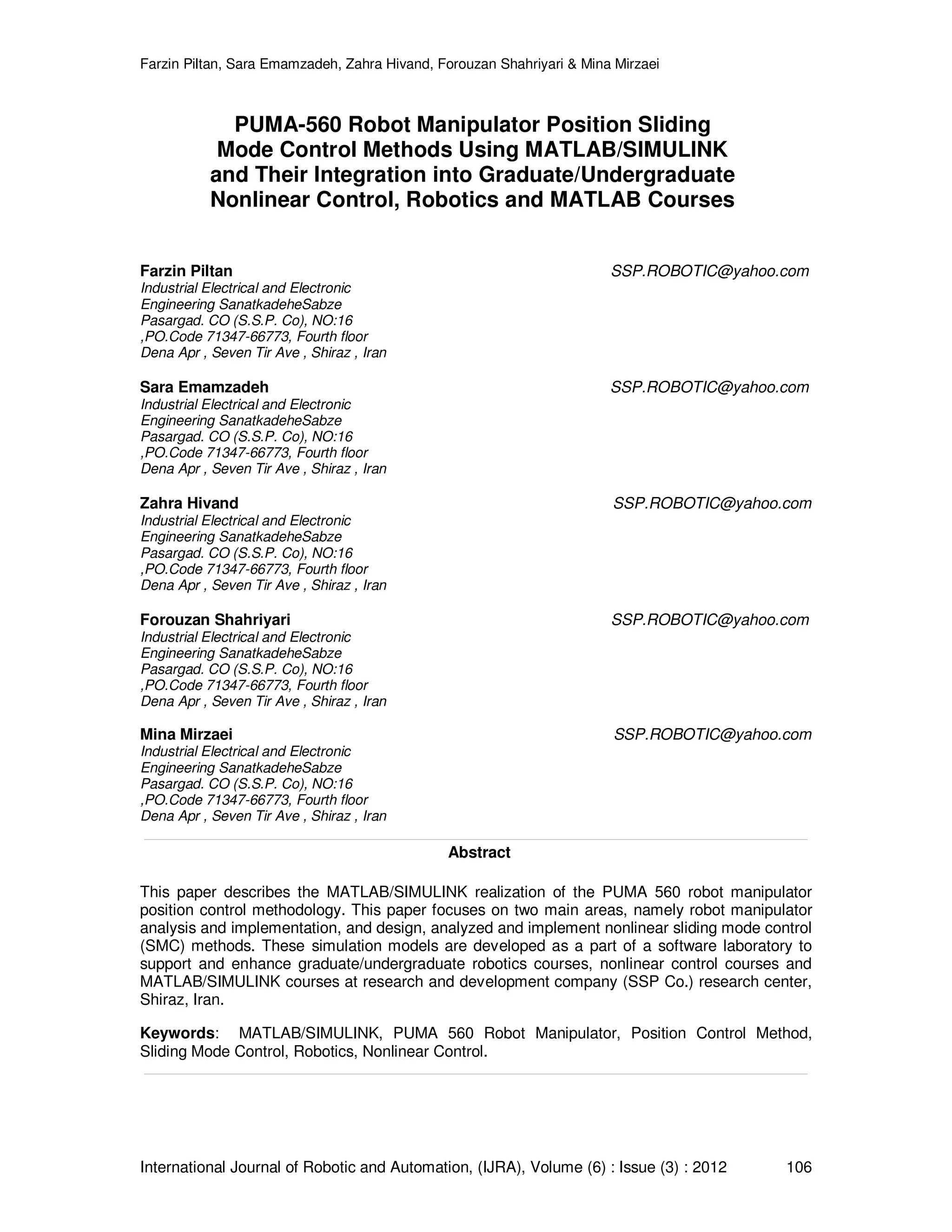
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 112 The third step to compute the forward kinematics for robot manipulator is finding the displacement vector ݀ , that it can be calculated by the following equation [1] ࢊ ൌ ሺࢁࡿሻ ሺࢁࢂሻሺࢁࡿሻ ڮ ሺࢁࢂሻሺࢁࢂሻ … . ሺࢁିࢂିሻሺࢁࡿሻ (6) The forth step to compute the forward kinematics for robot manipulator is calculate the transformation ܶ by the following formulation [1] ࢀ ൌ ࢀ . ࢀ . ࢀ … … . ࢀ ି ൌ ࡾ ࢊ ൨ (7) Kinematics of PUMA 560 robot manipulator: In PUMA robot manipulator the final transformation matrix is given by ࢀ ൌ ࢀ . ࢀ . ࢀ … … . ࢀ ൌ ࡾ ࢊ ൨ (8) That ܴ and ݀ is given by the following matrix ࡾ ൌ ࡺ࢞ ࢞ ࢀ࢞ ࡺ࢟ ࢟ ࢀ࢟ ࡺࢠ ࢠ ࢀࢠ ; ࢊ ൌ ࡼ࢞ ࡼ࢟ ࡼࢠ (9) That ܶ can be determined by ࢀ ൌ ࡺ࢞ ࢞ ࢀ࢞ ࡺ࢟ ࢟ ࢀ࢟ ࡺࢠ ࢠ ࢀࢠ ࡼ࢞ ࡼ࢟ ࡼࢠ (10) Table 2 shows the PUMA 560 D-H parameters. Link i ࣂ(rad) ࢻ(rad) ࢇ(m) ࢊ(m) 1 ࣂ െ࣊ ൗ 0 0 2 ࣂ 0 0.4318 0.14909 3 ࣂ ࣊ ൗ 0.0203 0 4 ࣂ െ ࣊ ൗ 0 0.43307 5 ࣂ ࣊ ൗ 0 0 6 ࣂ 0 0 0.05625 TABLE 2: PUMA 560 robot manipulator DH parameter [4]. As equation 8 the cells of above matrix for PUMA 560 robot manipulator is calculated by following equations: ࡺ࢞ ൌ ࢉ࢙ሺࣂ_ሻ ൈ ሺࢉ࢙ሺࣂ_ሻ ൈ ሺࢉ࢙ሺࣂ_ሻ ൈ ࢉ࢙ሺࣂ_ ࣂ_ሻ ൈ ࢉ࢙ሺࣂ_ሻ ࢙ሺࣂ_ሻ ൈ ࢙ሺࣂ_ሻሻ ࢙ሺࣂ_ሻ ൈ ࢙ሺࣂ_ ࣂ_ሻ ൈ ࢉ࢙ሺࣂ_ሻሻ ࢙ሺࣂ_ሻ ൈ ሺ࢙ሺࣂ_ሻ ൈ ࢉ࢙ሺࣂ_ ࣂ_ሻ ൈ ࢉ࢙ሺࣂ_ሻ െ ࢉ࢙ሺࣂ_ሻ ൈ ࢙ሺࣂ_ሻሻ (11)](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-7-2048.jpg)


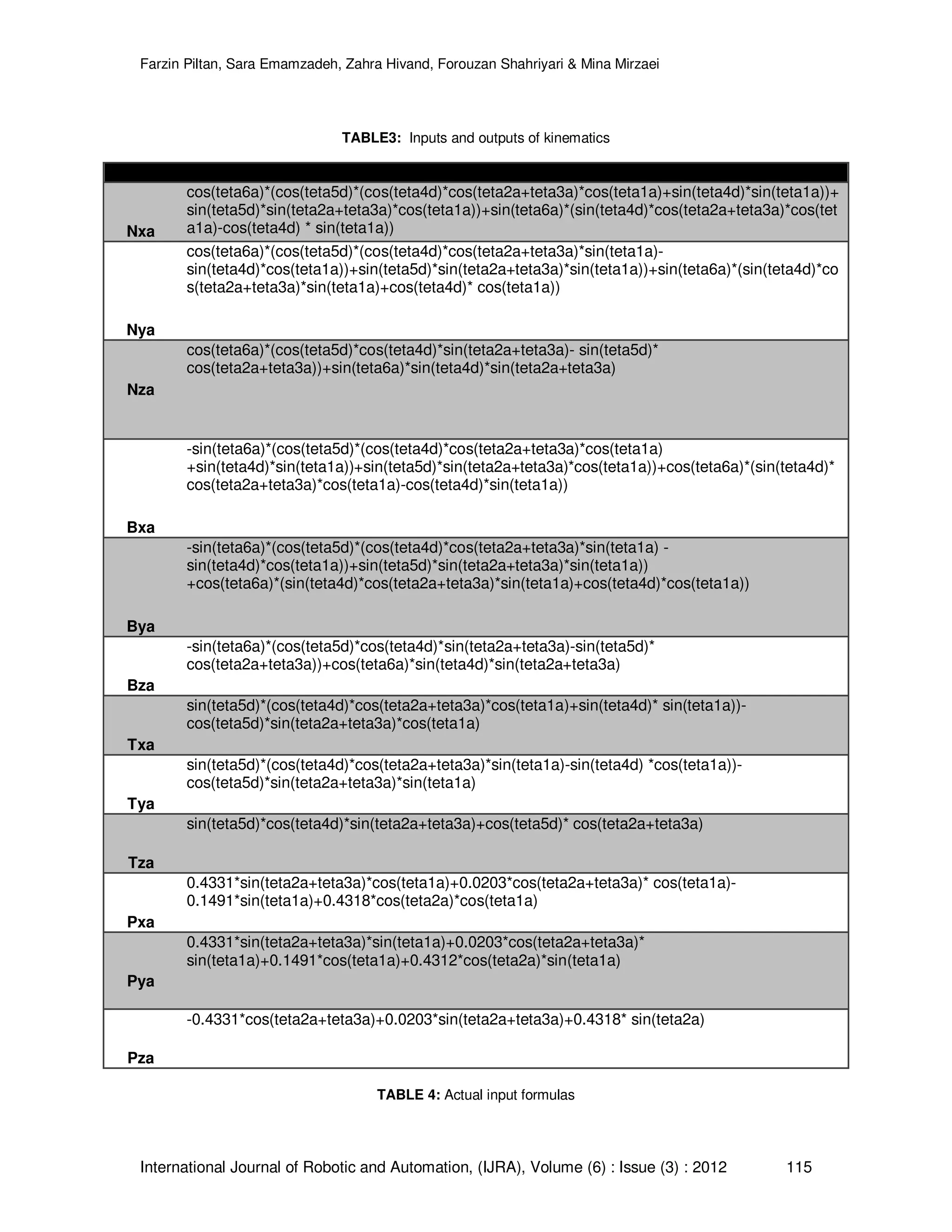
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 117 As mentioned before, we aim on position controlling. so we must connect desired position and actual position to RMS error block diagram to find out whether the end-effector has reached to expected point or not. Kinematics of our system is shown in Figure 5. FIGURE 5: Kinematics of PUMA 560 Dynamic of Robot Manipulator Dynamic equation is the study of motion with regard to forces. Dynamic modeling is vital for control, mechanical design, and simulation. It is used to describe dynamic parameters and also to describe the relationship between displacement, velocity and acceleration to force acting on robot manipulator. To calculate the dynamic parameters which introduced in the following lines, four algorithms are very important. i. Inverse dynamics, in this algorithm, joint actuators are computed (e.g., force/torque or voltage/current) from endeffector position, velocity, and acceleration. It is used in feed forward control. ii. Forward dynamics used to compute the joint acceleration from joint actuators. This algorithm is required for simulations. iii. The joint-space inertia matrix, necessary for maps the joint acceleration to the joint actuators. It is used in analysis, feedback control and in some integral part of forward dynamics formulation. iv. The operational-space inertia matrix, this algorithm maps the task accelerations to task actuator in Cartesian space. It is required for control of end-effector. The field of dynamic robot manipulator has a wide literature that published in professional journals and established textbooks [1, 6, 14]. Several different methods are available to compute robot manipulator dynamic equations. These methods include the Newton-Euler (N-E) methodology, the Lagrange-Euler (L-E) method, and Kane’s methodology [1].](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-12-2048.jpg)
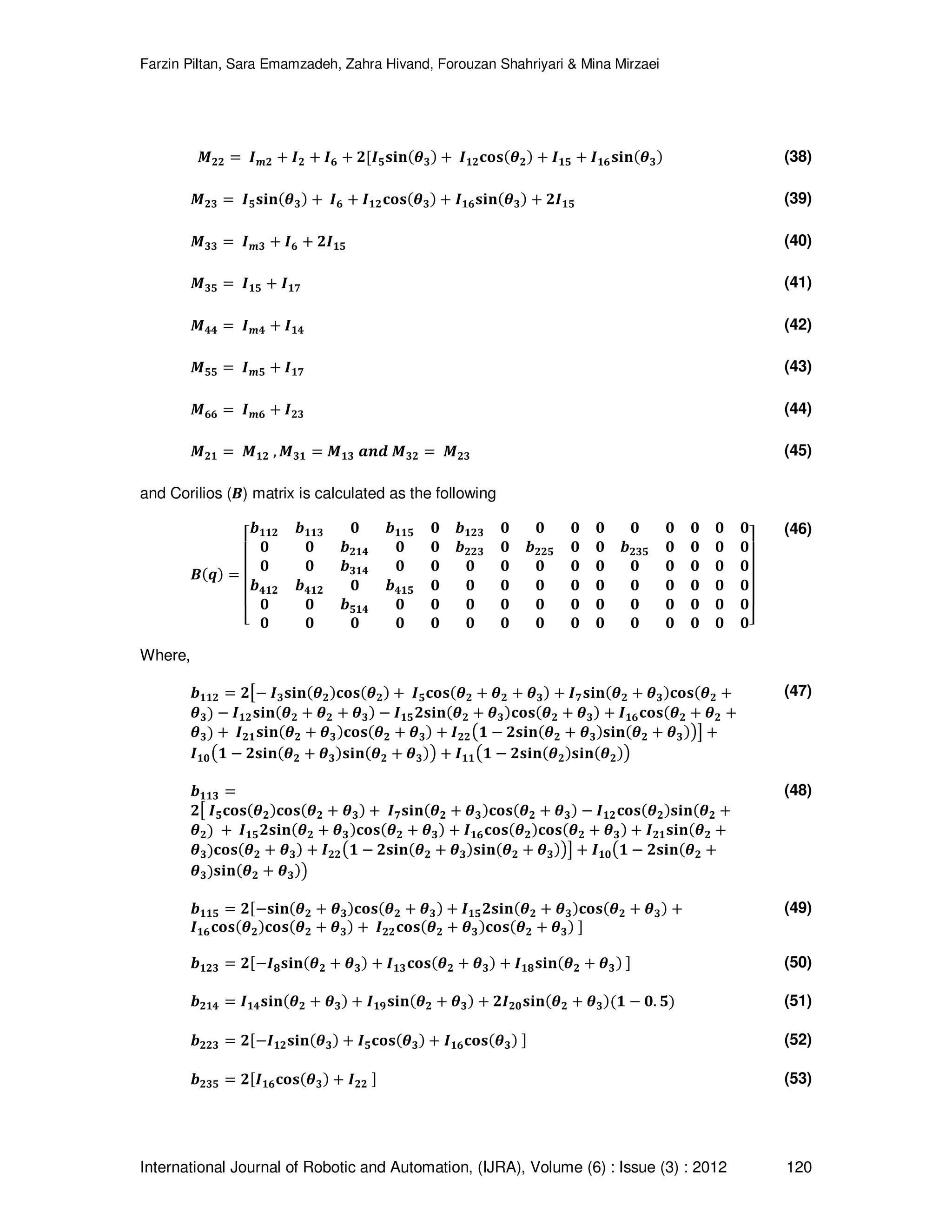
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 118 The Newton-Euler methodology is based on Newton’s second law and several different researchers are signifying to develop this method [1, 14]. This equation can be described the behavior of a robot manipulator link-by-link and joint-by-joint from base to endeffector, called forward recursion and transfer the essential information from end-effector to base frame, called backward recursive. The literature on Euler-Lagrange’s is vast but a good starting point to learn about it is in[1]. Calculate the dynamic equation robot manipulator using E-L method is easier because this equation is derivation of nonlinear coupled and quadratic differential equations. The Kane’s method was introduced in 1961 by Professor Thomas Kane[1, 6]. This method used to calculate the dynamic equation of motion without any differentiation between kinetic and potential energy functions. The equation of a multi degrees of freedom (DOF) robot manipulator is calculated by the following equation[6]: ࡹሺሻሷ ࡺሺ, ሶ ሻ ൌ ࣎ (23) Where τ is ݊ ൈ 1 vector of actuation torque, M (q) is ݊ ൈ ݊ symmetric and positive define inertia matrix, ܰሺ,ݍ ݍሶሻ is the vector of nonlinearity term, and q is ݊ ൈ 1 position vector. In equation 2.8 if vector of nonlinearity term derive as Centrifugal, Coriolis and Gravity terms, as a result robot manipulator dynamic equation can also be written as [80]: ࡺሺ, ሶ ሻ ൌ ࢂሺ, ሶ ሻ ࡳሺሻ (24) ࢂሺ, ሶ ሻ ൌ ሺሻሾሶ ሶ ሿ ሺሻሾሶ ሿ (25) ࣎ ൌ ࡹሺሻሷ ሺሻሾሶ ሶ ሿ ሺሻሾሶ ሿ ࡳሺሻ (26) Where, ܤሺݍሻ is matrix of coriolis torques, ܥሺݍሻ is matrix of centrifugal torque, ሾݍሶ ݍሶሿ is vector of joint velocity that it can give by: ሾݍଵሶ . ݍሶଶ, ݍሶଵ.ݍሶଷ, … . , ݍሶଵ. ݍሶ,ݍሶଶ. ݍሶଷ, … . . ሿ் , and ሾݍሶሿଶ is vector, that it can given by: ሾݍଵሶ ଶ , ݍሶଶ ଶ ,ݍሶଷ ଶ , … . ሿ் . In robot manipulator dynamic part the inputs are torques and the outputs are actual displacements, as a result in (2.11) it can be written as [1, 6, 80-81]; ሷ ൌ ࡹିሺሻ. ሼ࣎ െ ࡺሺ, ሶ ሻሽ (27) To implementation (27) the first step is implement the kinetic energy matrix (M) parameters by used of Lagrange’s formulation. The second step is implementing the Coriolis and Centrifugal matrix which they can calculate by partial derivatives of kinetic energy. The last step to implement the dynamic equation of robot manipulator is to find the gravity vector by performing the summation of Lagrange’s formulation. The kinetic energy equation (M) is a ݊ ൈ ݊ symmetric matrix that can be calculated by the following equation; ࡹሺࣂሻ ൌ ࡶ࢜ ࢀ ࡶ࢜ ࡶ࣓ ࢀ ࡵࡶ࣓ ࡶ࢜ ࢀ ࡶ࢜ ࡶ࣓ ࢀ ࡵࡶ࣓ ࡶ࢜ ࢀ ࡶ࢜ ࡶ࣓ ࢀ ࡵࡶ࣓ ࡶ࢜ ࢀ ࡶ࢜ ࡶ࣓ ࢀ ࡵࡶ࣓ ࡶ࢜ ࢀ ࡶ࢜ ࡶ࣓ ࢀ ࡵࡶ࣓ࡶ࢜ ࢀ ࡶ࢜ ࡶ࣓ ࢀ ࡵࡶ࣓ (28) As mentioned above the kinetic energy matrix in ݊ DOF is a ݊ ൈ ݊ matrix that can be calculated by the following matrix [1, 6] ࡹሺሻ ൌ ۏ ێ ێ ێ ێ ۍ ࡹ ࡹ … … . … . . ࡹ ࡹ … … … . … . . ࡹ … … … … … … … … … … … … … … … … … … ࡹ. … … … . … ࡹ.ے ۑ ۑ ۑ ۑ ې (29)](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-13-2048.jpg)
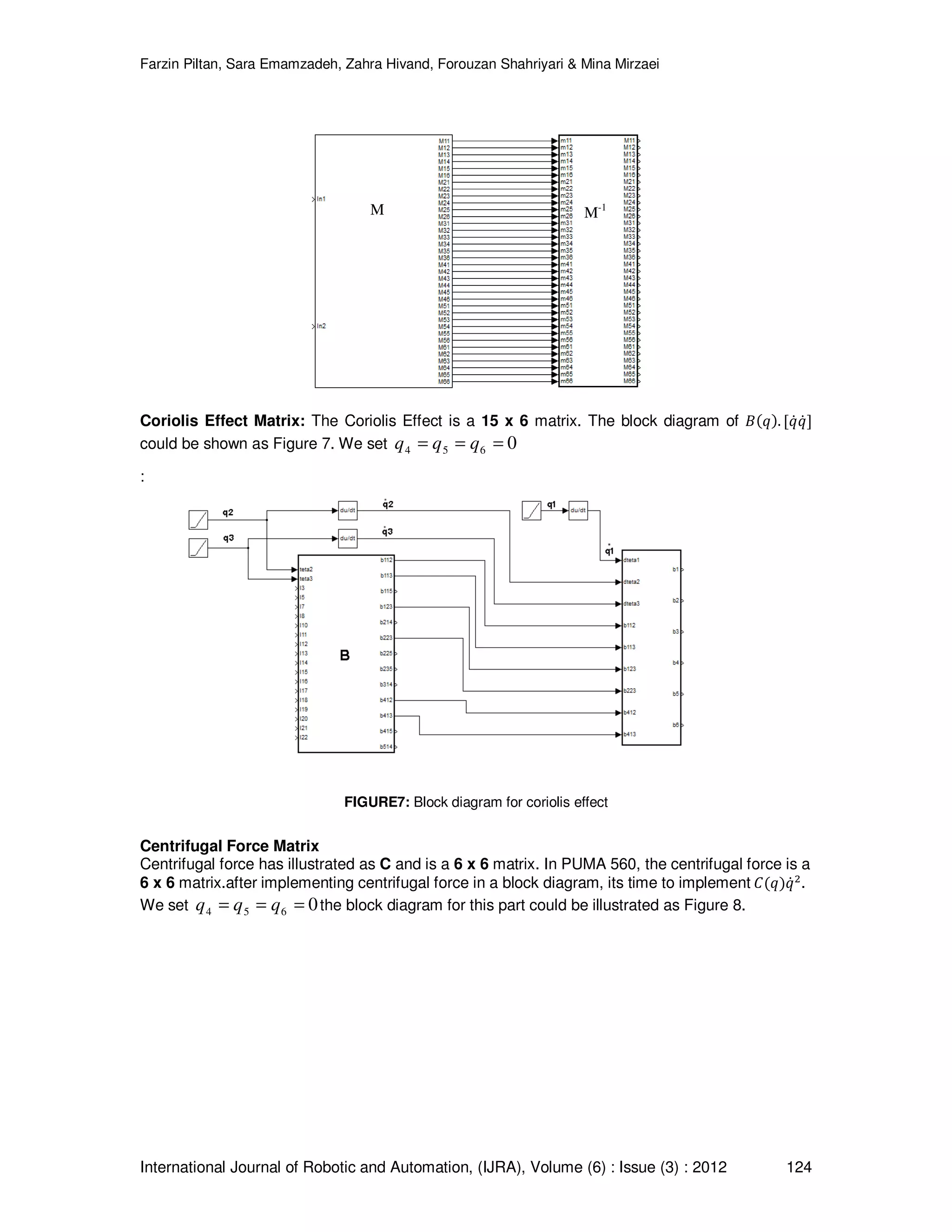
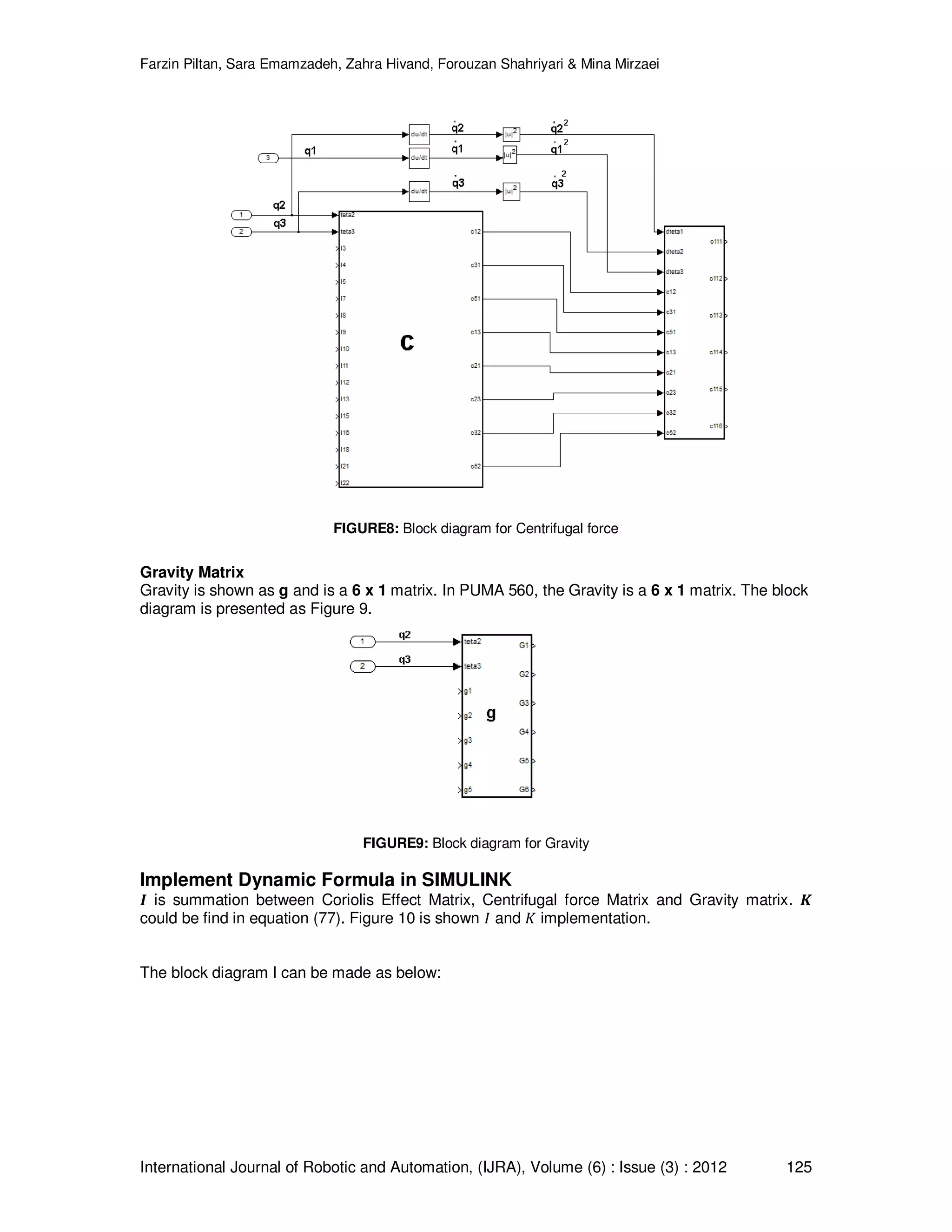
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 119 The Coriolis matrix (B) is a ݊ ൈ ሺିଵሻ ଶ matrix which calculated as follows; ሺሻ ൌ ۏ ێ ێ ێ ێ ۍ ࢈ ࢈ … ࢈ ࢈ … ࢈ … … ࢈.ି. ࢈ … … ࢈ ࢈ … … … … ࢈.ି. … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … ࢈.. … … ࢈.. … … … … … ࢈.ି.ے ۑ ۑ ۑ ۑ ې (30) and the Centrifugal matrix (C) is a ݊ ൈ ݊ matrix; ሺሻ ൌ ڮ ڭ ڰ ڭ ڮ ൩ (31) And last the Gravity vector (G) is a ݊ ൈ 1 vector; ࡳሺሻ ൌ ൦ ࢍ ࢍ ڭ ࢍ ൪ (32) Dynamics of PUMA560 Robot Manipulator To position control of robot manipulator, the second three axes are locked the dynamic equation of PUMA robot manipulator is given by [77-80]; ࡹሺࣂሻሷ ࣂ ࣂሷ ࣂሷ ሷ ۰ሺࣂሻ ࣂሶ ࣂሶ ࣂሶ ࣂሶ ࣂሶ ࣂሶ ሺࣂሻ ࣂሶ ࣂሶ ࣂሶ ࡳሺࣂሻ ൌ ࣎ ࣎ ࣎ ൩ (33) Where ࡹሺሻ ൌ ۏ ێ ێ ێ ێ ۍ ࡹ ࡹ ࡹ ࡹ ࡹ ࡹ ࡹ ࡹ ࡹ ࡹ ࡹ ࡹ ࡹے ۑ ۑ ۑ ۑ ې (34) ࡹ is computed as ࡹ ൌ ࡵ ࡵ ࡵ ൈ ܛܗ܋ሺࣂሻ ܛܗ܋ሺࣂ ሻ ࡵૠܖܑܛሺࣂ ࣂሻܖܑܛሺࣂ ࣂሻ ࡵܖܑܛሺࣂ ࣂሻܛܗ܋ሺࣂ ࣂሻ ࡵܖܑܛሺࣂሻܛܗ܋ሺࣂሻ ࡵܖܑܛሺࣂ ࣂሻܖܑܛሺࣂ ࣂሻ ሾࡵܛܗ܋ሺࣂሻܖܑܛሺࣂ ࣂሻ ࡵܛܗ܋ሺࣂሻܛܗ܋ሺࣂ ࣂሻ ࡵܖܑܛሺࣂ ࣂሻܖܑܛሺࣂ ࣂሻ ࡵܛܗ܋ሺࣂሻܖܑܛሺࣂ ࣂሻ ࡵܖܑܛሺࣂ ࣂሻܛܗ܋ሺࣂ ࣂሻ (35) ࡹ ൌ ࡵܖܑܛሺࣂሻ ࡵૡܛܗ܋ሺࣂ ࣂሻ ࡵૢࢉ࢙ሺࣂሻ ࡵܖܑܛሺࣂ ࣂሻ െ ࡵૡܛܗ܋ሺࣂ ࣂሻ (36) ࡹ ൌ ࡵૡܛܗ܋ሺࣂ ࣂሻ ࡵܖܑܛሺࣂ ࣂሻ െ ࡵૡܛܗ܋ሺࣂ ࣂሻ (37)](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-14-2048.jpg)

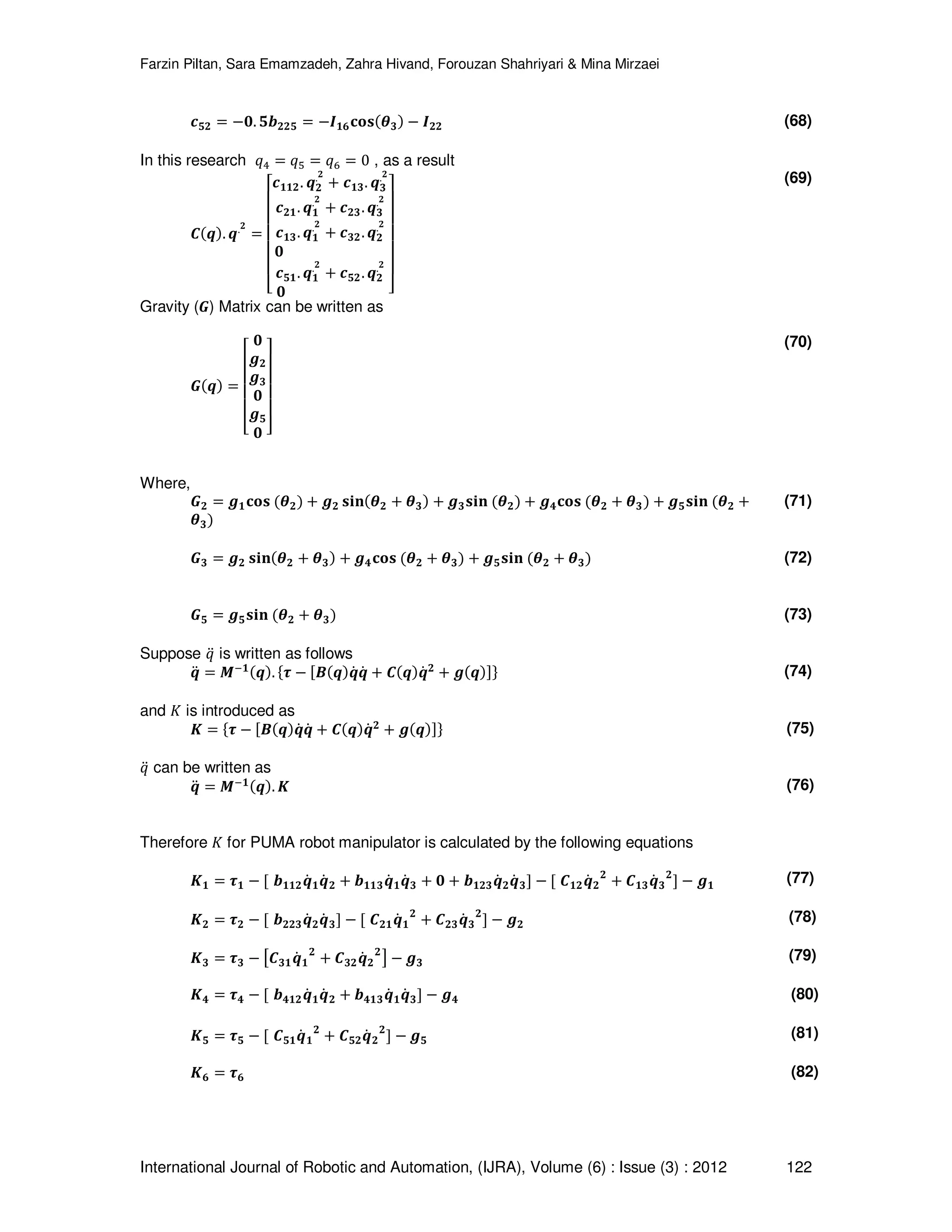
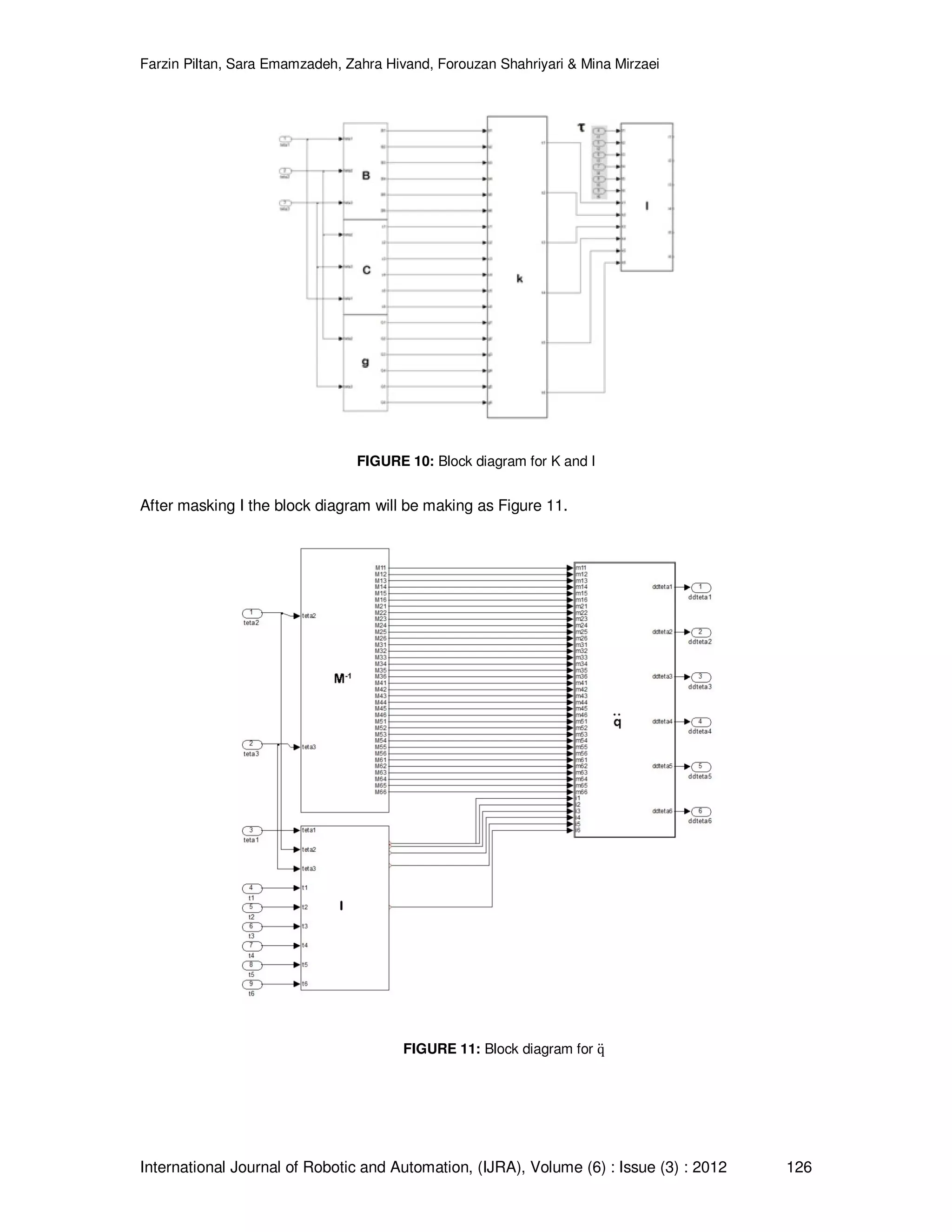
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 123 An information about inertial constant and gravitational constant are shown in Tables 6 and 7 based on the studies carried out by Armstrong [80] and Corke and Armstrong [81]. Iଵ ൌ 1.43 േ 0.05 ܫଶ ൌ 1.75 േ 0.07 ܫଷ ൌ 1.38 േ 0.05 ܫସ ൌ 0.69 േ 0.02 ܫହ ൌ 0.372 േ 0.031 I ൌ 0.333 േ 0.016 ܫ ൌ 0.298 േ 0.029 I଼ ൌ െ0.134 േ 0.014 ܫଽ ൌ 0.0238 േ 0.012 ܫଵ ൌ െ0.0213 േ 0.0022 ܫଵଵ ൌ െ0.0142 േ 0.0070 ܫଵଶ ൌ െ0.011 േ 0.0011 ܫଵଷ ൌ െ0.00379 േ 0.0009 ܫଵସ ൌ 0.00164 േ 0.000070 ܫଵହ ൌ 0.00125 േ 0.0003 ܫଵ ൌ 0.00124 േ 0.0003 ܫଵ ൌ 0.000642 േ 0.0003 Iଵ଼ ൌ 0.000431 േ 0.00013 ܫଵଽ ൌ 0.0003 േ 0.0014 ܫଶ ൌ െ0.000202 േ 0.0008 Iଶଵ ൌ െ0.0001 േ 0.0006 ܫଶଶ ൌ െ0.000058 േ 0.000015 Iଶଷ ൌ 0.00004 േ 0.00002 ܫଵ ൌ 1.14 േ 0.27 ܫଶ ൌ 4.71 േ 0.54 ܫଷ ൌ 0.827 േ 0.093 ܫସ ൌ 0.2 േ 0.016 ܫହ ൌ 0.179 േ 0.014 ܫ ൌ 0.193 േ 0.016 TABLE 6: Inertial constant reference (Kg.m 2 ) ݃ଵ ൌ െ37.2 േ 0.5 ݃ଶ ൌ െ8.44 േ 0.20 ݃ଷ ൌ 1.02 േ 0.50 ݃ସ ൌ 0.249 േ 0.025 ݃ହ ൌ െ0.0282 േ 0.0056 TABLE 7: Gravitational constant (N.m) Formulation and implementation of Matrix Entries: As mentioned before, every matrix entry has its own formula. Below you can find them: Finding inverse matrix for kinetic energy: Kinetic energy has illustrated by M. The kinetic energy matrix is a 6 x 6 matrix [10]. In MATLAB, the command “inv(matrix)” will inverse a n x n matrix .what is more, the results must be taken into a separate matrix in order to be used in Dynamic equation. Both M and M -1 must be implemented in a separate Matlab Embedded Function. The outputs of M will be linked to inputs of M-1 . The block diagram will be shown as Figure 6.](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-18-2048.jpg)
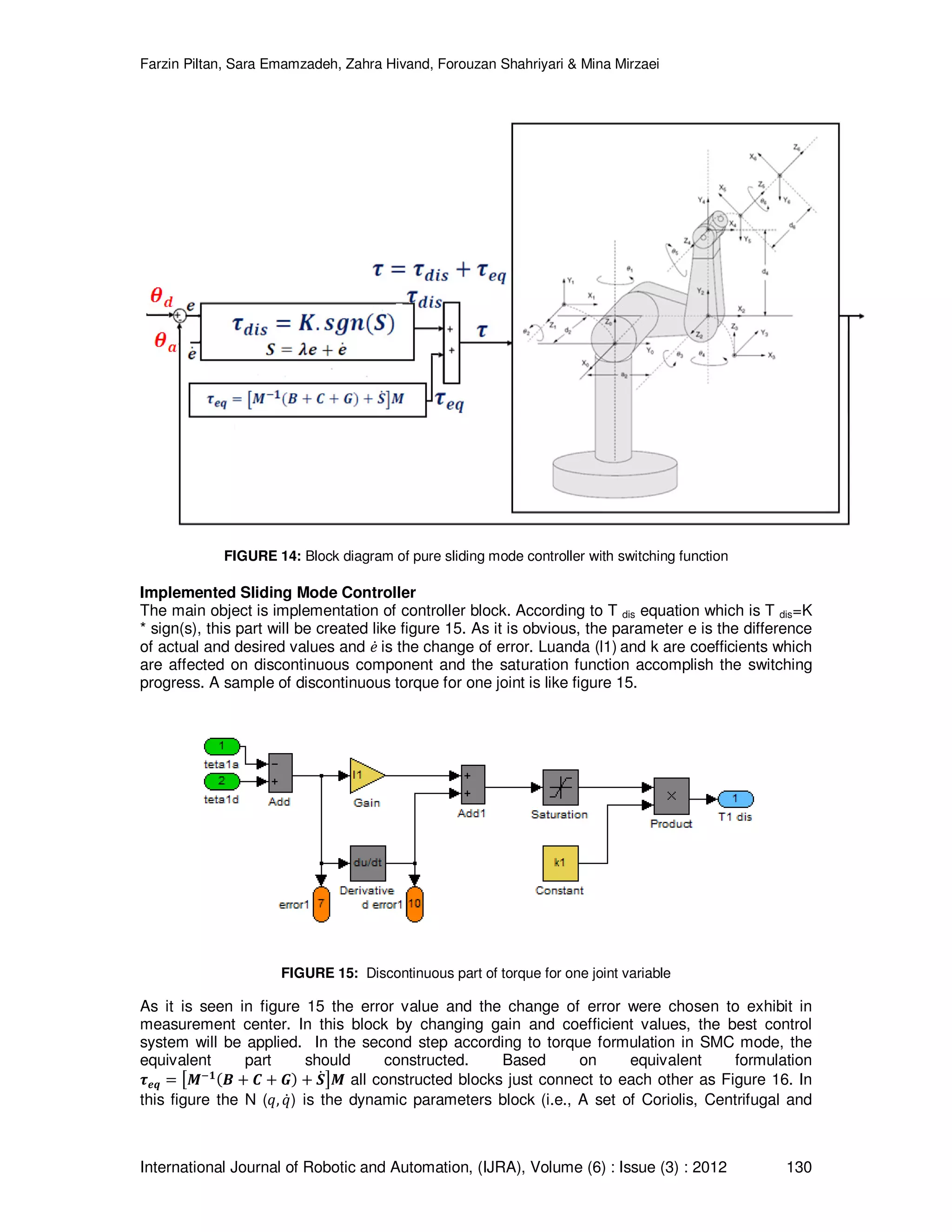
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 128 3. CONTROL: SLIDING MODE CONTROLLER ANALYSIS, MODELLING AND IMPLEMENTATION ON PUMA 560 ROBOT MANIPULATOR In this section formulations of sliding mode controller for robot manipulator is presented based on [1, 6]. Consider a nonlinear single input dynamic system is defined by [6]: ࢞ሺሻ ൌ ࢌሺ࢞ሬሬԦሻ ࢈ሺ࢞ሬሬԦሻ࢛ (83) Where u is the vector of control input, ࢞ሺሻ is the ࢚ࢎ derivation of ࢞, ࢞ ൌ ሾ࢞, ࢞ሶ, ࢞ሷ, … , ࢞ሺିሻ ሿࢀ is the state vector, ࢌሺ࢞ሻ is unknown or uncertainty, and ࢈ሺ࢞ሻ is of known sign function. The main goal to design this controller is train to the desired state; ࢞ࢊ ൌ ሾ࢞ࢊ, ࢞ሶࢊ, ࢞ሷࢊ, … , ࢞ࢊ ሺିሻ ሿࢀ , and trucking error vector is defined by [6]: ࢞ ൌ ࢞ െ ࢞ࢊ ൌ ሾ࢞, … , ࢞ሺିሻ ሿࢀ (84) A time-varying sliding surface ࢙ሺ࢞, ࢚ሻ in the state space ࡾ is given by [6]: ࢙ሺ࢞, ࢚ሻ ൌ ሺ ࢊ ࢊ࢚ ࣅሻି ࢞ ൌ (85) where λ is the positive constant. To further penalize tracking error, integral part can be used in sliding surface part as follows [6]: ࢙ሺ࢞, ࢚ሻ ൌ ሺ ݀ ݀ݐ ࣅሻି ቆන ࢞ ࢚ ࢊ࢚ቇ ൌ (86) The main target in this methodology is kept the sliding surface slope ࢙ሺ࢞, ࢚ሻ near to the zero. Therefore, one of the common strategies is to find input ࢁ outside of ࢙ሺ࢞, ࢚ሻ [6]. ࢊ ࢊ࢚ ࢙ሺ࢞, ࢚ሻ െࣀ|࢙ሺ࢞, ࢚ሻ| (87) where ζ is positive constant. If S(0)>0՜ ܌ ܜ܌ ܁ሺܜሻ െા (88) To eliminate the derivative term, it is used an integral term from t=0 to t=࢚࢘ࢋࢇࢉࢎ න ࢊ ࢊ࢚ ࢚ୀ࢚࢘ࢋࢇࢉࢎ ࢚ୀ ࡿሺ࢚ሻ െ න ࣁ ՜ ࡿ ࢚ୀ࢚࢘ࢋࢇࢉࢎ ࢚ୀ ሺ࢚࢘ࢋࢇࢉࢎሻ െ ࡿሺሻ െࣀሺ࢚࢘ࢋࢇࢉࢎ െ ሻ (89) Where ݐ is the time that trajectories reach to the sliding surface so, suppose S(ݐ ൌ 0ሻ defined as െ ࡿሺሻ െࣁሺ࢚࢘ࢋࢇࢉࢎሻ ՜ ࢚࢘ࢋࢇࢉࢎ ࡿሺሻ ࣀ (90) and ࢌ ࡿሺሻ ൏ 0 ՜ 0 െ ܵሺሻ െࣁሺ࢚࢘ࢋࢇࢉࢎሻ ՜ ࡿሺሻ െࣀሺ࢚࢘ࢋࢇࢉࢎሻ ՜ ࢚࢘ࢋࢇࢉࢎ |ࡿሺሻ| ࣁ (91) Equation (91) guarantees time to reach the sliding surface is smaller than |ࡿሺሻ| ࣀ since the trajectories are outside of ܵሺݐሻ. ࢌ ࡿ࢚࢘ࢋࢇࢉࢎ ൌ ࡿሺሻ ՜ ࢋ࢘࢘࢘ሺ࢞ െ ࢞ࢊሻ ൌ (92) suppose S is defined as ࢙ሺ࢞, ࢚ሻ ൌ ሺ ࢊ ࢊ࢚ ࣅሻ ࢞ ൌ ሺܠሶ െ ܠሶ܌ሻ ૃሺܠ െ ܠ܌ሻ (93) The derivation of S, namely, ܵሶ can be calculated as the following; ࡿሶ ൌ ሺܠሷ െ ܠሷ܌ሻ ૃሺܠሶ െ ܠሶ܌ሻ (94) suppose the second order system is defined as;](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-23-2048.jpg)
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 129 ࢞ሷ ൌ ࢌ ࢛ ՜ ࡿሶ ൌ ࢌ ࢁ െ ࢞ሷࢊ ૃሺܠሶ െ ܠሶ܌ሻ (95) Where ࢌ is the dynamic uncertain, and also since ܵ ൌ 0 ܽ݊݀ ܵሶ ൌ 0, to have the best approximation ,ࢁ is defined as ࢁ ൌ െࢌ ࢞ሷࢊ െ ࣅሺܠሶ െ ܠሶ܌ሻ (96) A simple solution to get the sliding condition when the dynamic parameters have uncertainty is the switching control law: ࢁࢊ࢙ ൌ ࢁ െ ࡷሺ࢞ሬሬԦ, ࢚ሻ · ܖܛሺ࢙ሻ (97) where the switching function ܖܛሺ܁ሻ is defined as [1, 6] ࢙ࢍሺ࢙ሻ ൌ ൝ ࢙ 0 െ ࢙ ൏ 0 ࢙ ൌ (98) and the ࡷሺ࢞ሬሬԦ, ࢚ሻ is the positive constant. Suppose by (90) the following equation can be written as, ࢊ ࢊ࢚ ࢙ሺ࢞, ࢚ሻ ൌ ܁ ·ሶ ܁ ൌ ൣࢌ െ ࢌ െ ࡷܖܛሺ࢙ሻ൧ · ࡿ ൌ ൫ࢌ െ ࢌ൯ · ࡿ െ ࡷ|ࡿ| (99) and if the equation (94) instead of (93) the sliding surface can be calculated as ࢙ሺ࢞, ࢚ሻ ൌ ሺ ࢊ ࢊ࢚ ࣅሻ ቆන ࢞ ࢚ ࢊ࢚ቇ ൌ ሺܠሶ െ ܠሶ܌ሻ ࣅሺܠሶ െ ܠሶ܌ሻ െ ૃሺܠ െ ܠ܌ሻ (100) in this method the approximation of ࢁ is computed as [6] ࢁ ൌ െࢌ ࢞ሷࢊ െ ࣅሺܠሶ െ ܠሶ܌ሻ ૃሺܠ െ ܠ܌ሻ (101) Based on above discussion, the sliding mode control law for a multi degrees of freedom robot manipulator is written as [1, 6]: ࣎ ൌ ࣎ࢋ ࣎ࢊ࢙ (102) Where, the model-based component ࣎ࢋ is the nominal dynamics of systems and ࣎ࢋ for first 3 DOF PUMA robot manipulator can be calculate as follows [1]: ࣎ࢋ ൌ ൣࡹିሺ ࡳሻ ࡿሶ൧ࡹ (103) and ࣎ࢊ࢙ is computed as [1]; ࣎ࢊ࢙ ൌ ࡷ · ܖܛሺࡿሻ (104) by replace the formulation (104) in (102) the control output can be written as; ࣎ ൌ ࣎ࢋ ࡷ. ܖܛሺࡿሻ (105) Figure 14 shows the position classical sliding mode control for PUMA 560 robot manipulator. By (105) and (103) the sliding mode control of PUMA 560 robot manipulator is calculated as; ࣎ ൌ ൣࡹିሺ ࡳሻ ࡿሶ൧ࡹ ࡷ · ܖܛሺࡿሻ (106) where ܵ ൌ ߣ݁ ݁ሶ in PD-SMC and ܵ ൌ ߣ݁ ݁ሶ ሺ ఒ ଶ ሻଶ ∑ ݁ in PID-SMC.](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-24-2048.jpg)
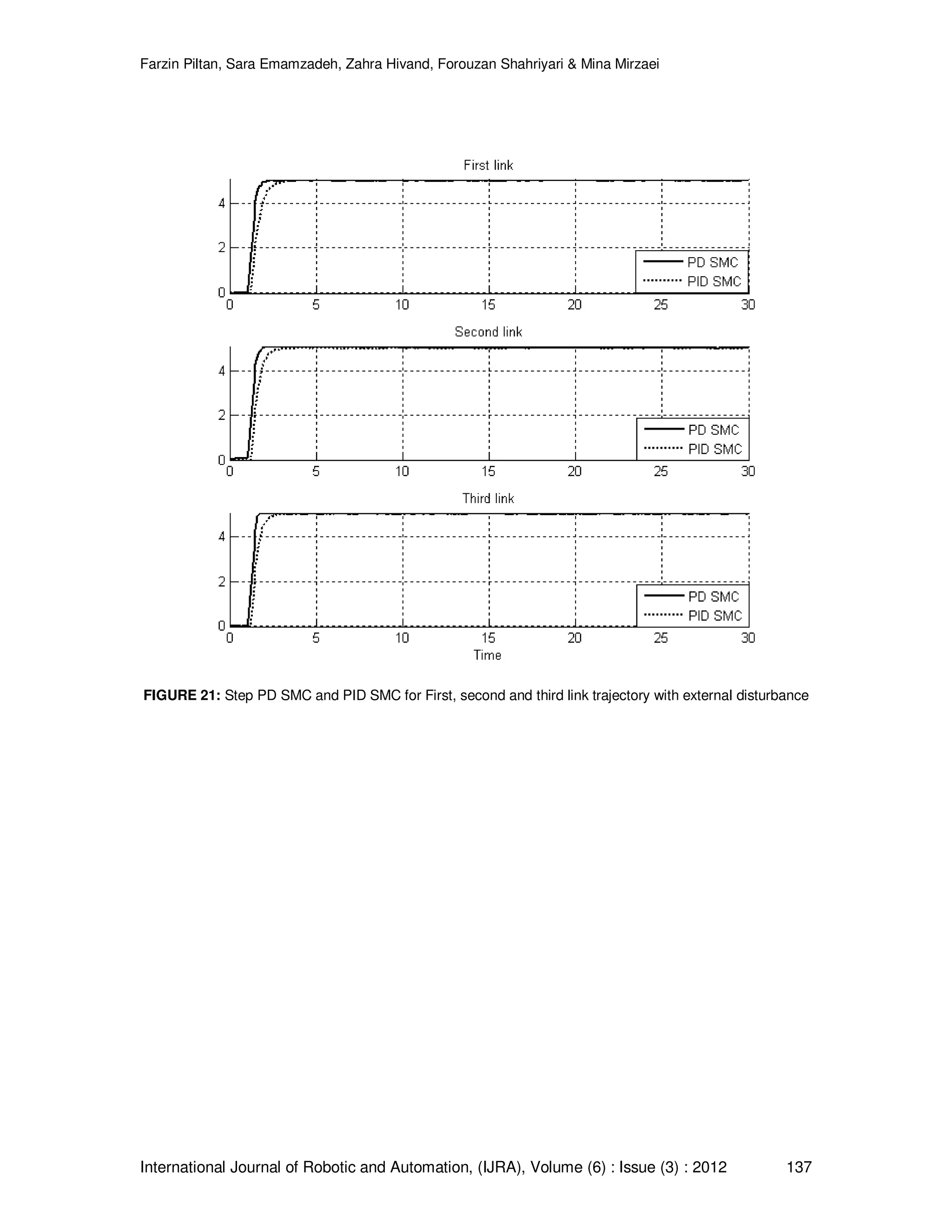
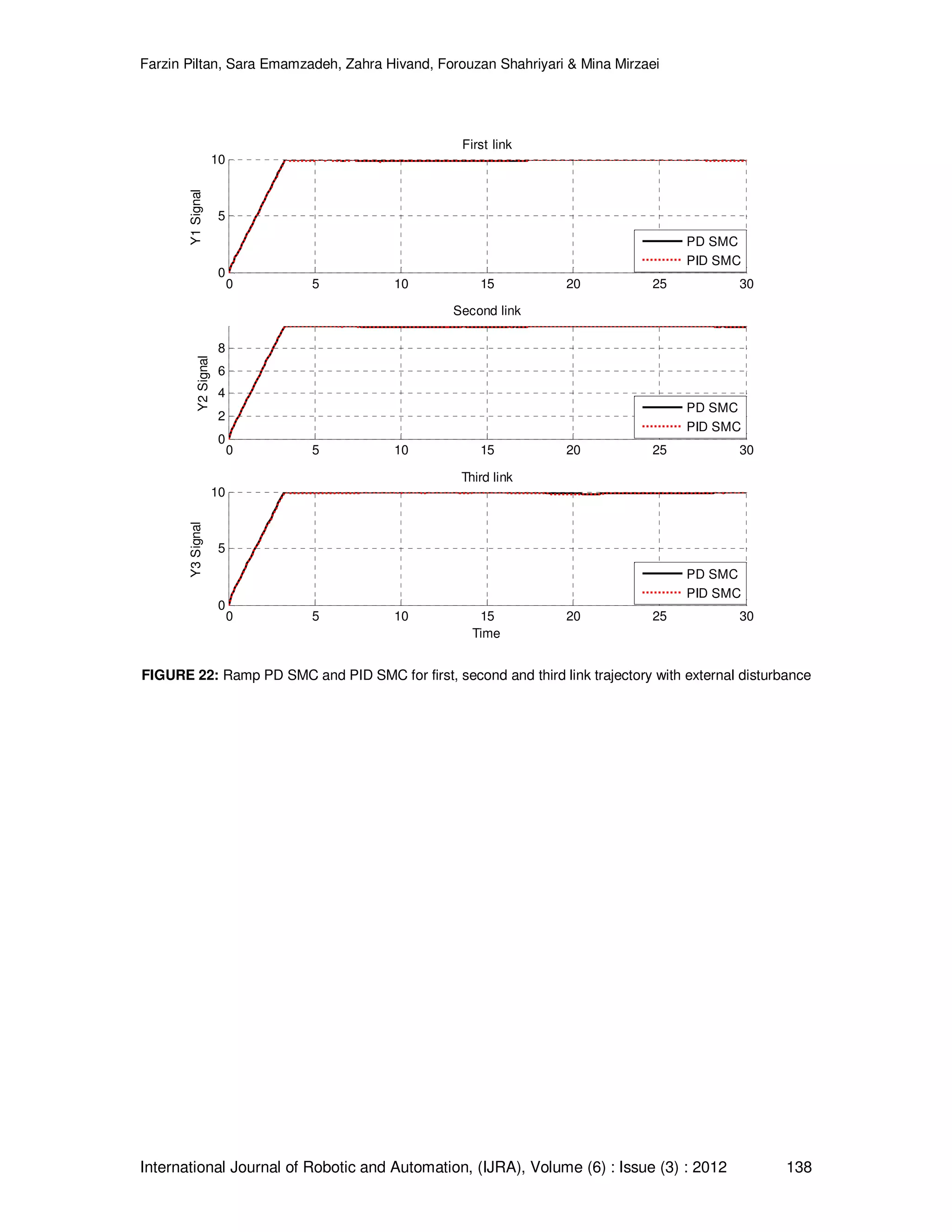
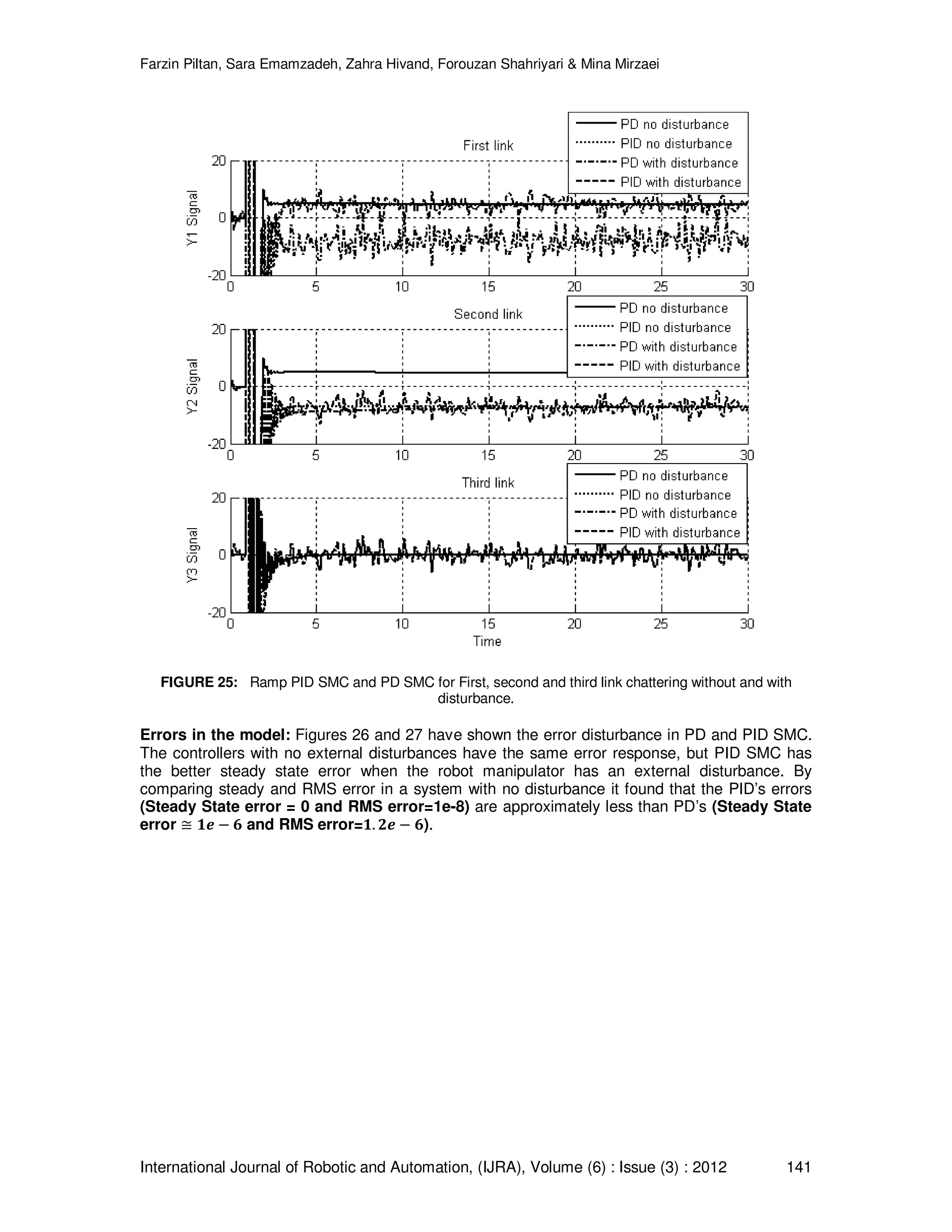
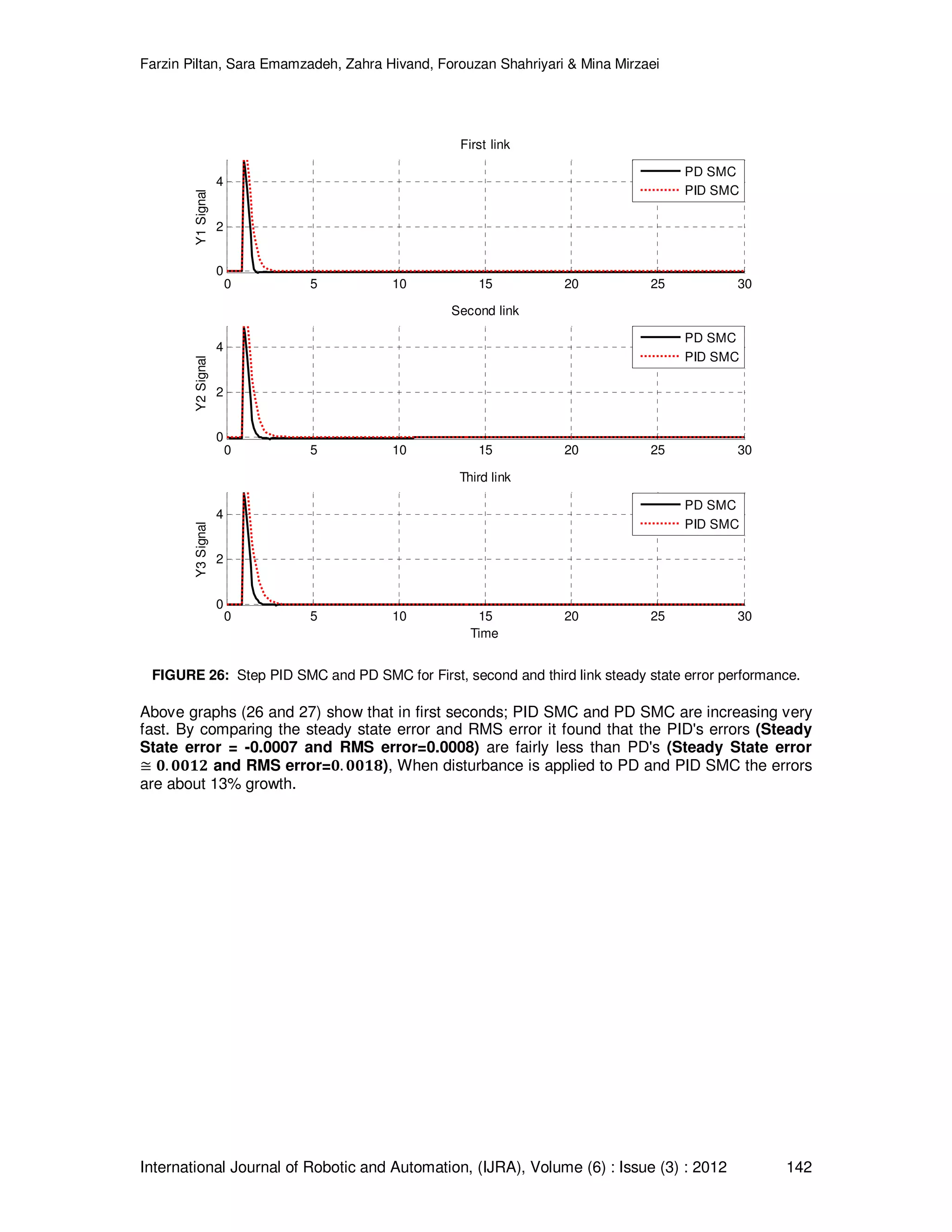
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 143 FIGURE 27: Ramp PID SMC and PD SMC for First, second and third link steady state error performance 5. CONCLUSION In this research we introduced, basic concepts of robot manipulator (e.g., PUMA 560 robot manipulator) and nonlinear control methodology. PUMA 560 robot manipulator is a 6 DOF serial robot manipulator. One of the most active research areas in the field of robotics is robot manipulators control, because these systems are multi-input multi-output (MIMO), nonlinear, and uncertainty. At present, robot manipulators are used in unknown and unstructured situation and caused to provide complicated systems, consequently strong mathematical tools are used in new control methodologies to design nonlinear robust controller with satisfactory performance (e.g., minimum error, good trajectory, disturbance rejection). Sliding mode controller (SMC) is a significant nonlinear controller under condition of partly uncertain dynamic parameters of system. This controller is used to control of highly nonlinear systems especially for robot manipulators, because this controller is a robust and stable. Conversely, pure sliding mode controller is used in many applications; it has an important drawback namely; chattering phenomenon. The chattering phenomenon problem can be reduced by using linear saturation boundary layer function in sliding mode control law. Lyapunov stability is proved in pure sliding mode controller based on switching (sign) function. REFERENCES [1] T. R. Kurfess, Robotics and automation handbook: CRC, 2005. [2] J. J. E. Slotine and W. Li, Applied nonlinear control vol. 461: Prentice hall Englewood Cliffs, NJ, 1991. 0 2 4 6 8 10 12 14 16 18 20 -1 -0.5 0 0.5 1 Y1Signal First link 0 2 4 6 8 10 12 14 16 18 20 -1 0 1 Y2Signal Second link 0 2 4 6 8 10 12 14 16 18 20 -1 0 1 Y3Signal Time Third link PD SMC PID SMC PD SMC PID SMC PD SMC PID SMC](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-38-2048.jpg)
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 144 [3] K. Ogata, Modern control engineering: Prentice Hall, 2009. [4] L. Cheng, Z. G. Hou, M. Tan, D. Liu and A. M. Zou, "Multi-agent based adaptive consensus control for multiple manipulators with kinematic uncertainties," 2008, pp. 189-194. [5] J. J. D'Azzo, C. H. Houpis and S. N. Sheldon, Linear control system analysis and design with MATLAB: CRC, 2003. [6] B. Siciliano and O. Khatib, Springer handbook of robotics: Springer-Verlag New York Inc, 2008. [7] I. Boiko, L. Fridman, A. Pisano and E. Usai, "Analysis of chattering in systems with second- order sliding modes," IEEE Transactions on Automatic Control, No. 11, vol. 52,pp. 2085- 2102, 2007. [8] J. Wang, A. Rad and P. Chan, "Indirect adaptive fuzzy sliding mode control: Part I: fuzzy switching," Fuzzy Sets and Systems, No. 1, vol. 122,pp. 21-30, 2001. [9] C. Wu, "Robot accuracy analysis based on kinematics," IEEE Journal of Robotics and Automation, No. 3, vol. 2, pp. 171-179, 1986. [10] H. Zhang and R. P. Paul, "A parallel solution to robot inverse kinematics," IEEE conference proceeding, 2002, pp. 1140-1145. [11] J. Kieffer, "A path following algorithm for manipulator inverse kinematics," IEEE conference proceeding, 2002, pp. 475-480. [12] Z. Ahmad and A. Guez, "On the solution to the inverse kinematic problem(of robot)," IEEE conference proceeding, 1990, pp. 1692-1697. [13] F. T. Cheng, T. L. Hour, Y. Y. Sun and T. H. Chen, "Study and resolution of singularities for a 6-DOF PUMA manipulator," Systems, Man, and Cybernetics, Part B: Cybernetics, IEEE Transactions on, No. 2, vol. 27, pp. 332-343, 2002. [14] M. W. Spong and M. Vidyasagar, Robot dynamics and control: Wiley-India, 2009. [15] A. Vivas and V. Mosquera, "Predictive functional control of a PUMA robot," Conference Proceedings, 2005. [16] D. Nguyen-Tuong, M. Seeger and J. Peters, "Computed torque control with nonparametric regression models," IEEE conference proceeding, 2008, pp. 212-217. [17] V. Utkin, "Variable structure systems with sliding modes," Automatic Control, IEEE Transactions on, No. 2, vol. 22, pp. 212-222, 2002. [18] R. A. DeCarlo, S. H. Zak and G. P. Matthews, "Variable structure control of nonlinear multivariable systems: a tutorial," Proceedings of the IEEE, No. 3, vol. 76, pp. 212-232, 2002. [19] K. D. Young, V. Utkin and U. Ozguner, "A control engineer's guide to sliding mode control," IEEE conference proceeding, 2002, pp. 1-14. [20] O. Kaynak, "Guest editorial special section on computationally intelligent methodologies and sliding-mode control," IEEE Transactions on Industrial Electronics, No. 1, vol. 48, pp. 2-3, 2001.](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-39-2048.jpg)
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 145 [21] J. J. Slotine and S. Sastry, "Tracking control of non-linear systems using sliding surfaces, with application to robot manipulators†," International Journal of Control, No. 2, vol. 38, pp. 465-492, 1983. [22] J. J. E. Slotine, "Sliding controller design for non-linear systems," International Journal of Control, No. 2, vol. 40, pp. 421-434, 1984. [23] R. Palm, "Sliding mode fuzzy control," IEEE conference proceeding,2002, pp. 519-526. [24] C. C. Weng and W. S. Yu, "Adaptive fuzzy sliding mode control for linear time-varying uncertain systems," IEEE conference proceeding, 2008, pp. 1483-1490. [25] M. Ertugrul and O. Kaynak, "Neuro sliding mode control of robotic manipulators," Mechatronics Journal, No. 1, vol. 10, pp. 239-263, 2000. [26] P. Kachroo and M. Tomizuka, "Chattering reduction and error convergence in the sliding- mode control of a class of nonlinear systems," Automatic Control, IEEE Transactions on, No. 7, vol. 41, pp. 1063-1068, 2002. [27] H. Elmali and N. Olgac, "Implementation of sliding mode control with perturbation estimation (SMCPE)," Control Systems Technology, IEEE Transactions on, No. 1, vol. 4, pp. 79-85, 2002. [28] J. Moura and N. Olgac, "A comparative study on simulations vs. experiments of SMCPE," IEEE conference proceeding, 2002, pp. 996-1000. [29] Y. Li and Q. Xu, "Adaptive Sliding Mode Control With Perturbation Estimation and PID Sliding Surface for Motion Tracking of a Piezo-Driven Micromanipulator," Control Systems Technology, IEEE Transactions on, No. 4, vol. 18, pp. 798-810, 2010. [30] B. Wu, Y. Dong, S. Wu, D. Xu and K. Zhao, "An integral variable structure controller with fuzzy tuning design for electro-hydraulic driving Stewart platform," IEEE conference proceeding, 2006, pp. 5-945. [31] Farzin Piltan , N. Sulaiman, Zahra Tajpaykar, Payman Ferdosali, Mehdi Rashidi, “Design Artificial Nonlinear Robust Controller Based on CTLC and FSMC with Tunable Gain,” International Journal of Robotic and Automation, 2 (3): 205-220, 2011. [32] Farzin Piltan, A. R. Salehi and Nasri B Sulaiman.,” Design artificial robust control of second order system based on adaptive fuzzy gain scheduling,” world applied science journal (WASJ), 13 (5): 1085-1092, 2011. [33] Farzin Piltan, N. Sulaiman, Atefeh Gavahian, Samira Soltani, Samaneh Roosta, “Design Mathematical Tunable Gain PID-Like Sliding Mode Fuzzy Controller with Minimum Rule Base,” International Journal of Robotic and Automation, 2 (3): 146-156, 2011. [34] Farzin Piltan , A. Zare, Nasri B. Sulaiman, M. H. Marhaban and R. Ramli, , “A Model Free Robust Sliding Surface Slope Adjustment in Sliding Mode Control for Robot Manipulator,” World Applied Science Journal, 12 (12): 2330-2336, 2011. [35] Farzin Piltan , A. H. Aryanfar, Nasri B. Sulaiman, M. H. Marhaban and R. Ramli “Design Adaptive Fuzzy Robust Controllers for Robot Manipulator,” World Applied Science Journal, 12 (12): 2317-2329, 2011. [36] Farzin Piltan, N. Sulaiman , Arash Zargari, Mohammad Keshavarz, Ali Badri , “Design PID- Like Fuzzy Controller With Minimum Rule Base and Mathematical Proposed On-line](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-40-2048.jpg)
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 146 Tunable Gain: Applied to Robot Manipulator,” International Journal of Artificial intelligence and expert system, 2 (4):184-195, 2011. [37] Farzin Piltan, Nasri Sulaiman, M. H. Marhaban and R. Ramli, “Design On-Line Tunable Gain Artificial Nonlinear Controller,” Journal of Advances In Computer Research, 2 (4): 75-83, 2011. [38] Farzin Piltan, N. Sulaiman, Payman Ferdosali, Iraj Assadi Talooki, “ Design Model Free Fuzzy Sliding Mode Control: Applied to Internal Combustion Engine,” International Journal of Engineering, 5 (4):302-312, 2011. [39] Farzin Piltan, N. Sulaiman, Samaneh Roosta, M.H. Marhaban, R. Ramli, “Design a New Sliding Mode Adaptive Hybrid Fuzzy Controller,” Journal of Advanced Science & Engineering Research , 1 (1): 115-123, 2011. [40] Farzin Piltan, Atefe Gavahian, N. Sulaiman, M.H. Marhaban, R. Ramli, “Novel Sliding Mode Controller for robot manipulator using FPGA,” Journal of Advanced Science & Engineering Research, 1 (1): 1-22, 2011. [41] Farzin Piltan, N. Sulaiman, A. Jalali & F. Danesh Narouei, “Design of Model Free Adaptive Fuzzy Computed Torque Controller: Applied to Nonlinear Second Order System,” International Journal of Robotics and Automation, 2 (4):232-244, 2011. [42] Farzin Piltan, N. Sulaiman, Iraj Asadi Talooki, Payman Ferdosali, “Control of IC Engine: Design a Novel MIMO Fuzzy Backstepping Adaptive Based Fuzzy Estimator Variable Structure Control ,” International Journal of Robotics and Automation, 2 (5):360-380, 2011. [43] Farzin Piltan, N. Sulaiman, Payman Ferdosali, Mehdi Rashidi, Zahra Tajpeikar, “Adaptive MIMO Fuzzy Compensate Fuzzy Sliding Mode Algorithm: Applied to Second Order Nonlinear System,” International Journal of Engineering, 5 (5): 380-398, 2011. [44] Farzin Piltan, N. Sulaiman, Hajar Nasiri, Sadeq Allahdadi, Mohammad A. Bairami, “Novel Robot Manipulator Adaptive Artificial Control: Design a Novel SISO Adaptive Fuzzy Sliding Algorithm Inverse Dynamic Like Method,” International Journal of Engineering, 5 (5): 399- 418, 2011. [45] Farzin Piltan, N. Sulaiman, Sadeq Allahdadi, Mohammadali Dialame, Abbas Zare, “Position Control of Robot Manipulator: Design a Novel SISO Adaptive Sliding Mode Fuzzy PD Fuzzy Sliding Mode Control,” International Journal of Artificial intelligence and Expert System, 2 (5):208-228, 2011. [46] Farzin Piltan, SH. Tayebi HAGHIGHI, N. Sulaiman, Iman Nazari, Sobhan Siamak, “Artificial Control of PUMA Robot Manipulator: A-Review of Fuzzy Inference Engine And Application to Classical Controller ,” International Journal of Robotics and Automation, 2 (5):401-425, 2011. [47] Farzin Piltan, N. Sulaiman, Abbas Zare, Sadeq Allahdadi, Mohammadali Dialame, “Design Adaptive Fuzzy Inference Sliding Mode Algorithm: Applied to Robot Arm,” International Journal of Robotics and Automation , 2 (5): 283-297, 2011. [48] Farzin Piltan, Amin Jalali, N. Sulaiman, Atefeh Gavahian, Sobhan Siamak, “Novel Artificial Control of Nonlinear Uncertain System: Design a Novel Modified PSO SISO Lyapunov Based Fuzzy Sliding Mode Algorithm ,” International Journal of Robotics and Automation, 2 (5): 298-316, 2011. [49] Farzin Piltan, N. Sulaiman, Amin Jalali, Koorosh Aslansefat, “Evolutionary Design of Mathematical tunable FPGA Based MIMO Fuzzy Estimator Sliding Mode Based Lyapunov](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-41-2048.jpg)
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 147 Algorithm: Applied to Robot Manipulator,” International Journal of Robotics and Automation, 2 (5):317-343, 2011. [50] Farzin Piltan, N. Sulaiman, Samaneh Roosta, Atefeh Gavahian, Samira Soltani, “Evolutionary Design of Backstepping Artificial Sliding Mode Based Position Algorithm: Applied to Robot Manipulator,” International Journal of Engineering, 5 (5):419-434, 2011. [51] Farzin Piltan, N. Sulaiman, S.Soltani, M. H. Marhaban & R. Ramli, “An Adaptive sliding surface slope adjustment in PD Sliding Mode Fuzzy Control for Robot Manipulator,” International Journal of Control and Automation , 4 (3): 65-76, 2011. [52] Farzin Piltan, N. Sulaiman, Mehdi Rashidi, Zahra Tajpaikar, Payman Ferdosali, “Design and Implementation of Sliding Mode Algorithm: Applied to Robot Manipulator-A Review ,” International Journal of Robotics and Automation, 2 (5):265-282, 2011. [53] Farzin Piltan, N. Sulaiman, Amin Jalali, Sobhan Siamak, and Iman Nazari, “Control of Robot Manipulator: Design a Novel Tuning MIMO Fuzzy Backstepping Adaptive Based Fuzzy Estimator Variable Structure Control ,” International Journal of Control and Automation, 4 (4):91-110, 2011. [54] Farzin Piltan, N. Sulaiman, Atefeh Gavahian, Samaneh Roosta, Samira Soltani, “On line Tuning Premise and Consequence FIS: Design Fuzzy Adaptive Fuzzy Sliding Mode Controller Based on Lyaponuv Theory,” International Journal of Robotics and Automation, 2 (5):381-400, 2011. [55] Farzin Piltan, N. Sulaiman, Samaneh Roosta, Atefeh Gavahian, Samira Soltani, “Artificial Chattering Free on-line Fuzzy Sliding Mode Algorithm for Uncertain System: Applied in Robot Manipulator,” International Journal of Engineering, 5 (5):360-379, 2011. [56] Farzin Piltan, N. Sulaiman and I.AsadiTalooki, “Evolutionary Design on-line Sliding Fuzzy Gain Scheduling Sliding Mode Algorithm: Applied to Internal Combustion Engine,” International Journal of Engineering Science and Technology, 3 (10):7301-7308, 2011. [57] Farzin Piltan, Nasri B Sulaiman, Iraj Asadi Talooki and Payman Ferdosali.,” Designing On- Line Tunable Gain Fuzzy Sliding Mode Controller Using Sliding Mode Fuzzy Algorithm: Applied to Internal Combustion Engine,” world applied science journal (WASJ), 15 (3): 422- 428, 2011. [58] B. K. Yoo and W. C. Ham, "Adaptive control of robot manipulator using fuzzy compensator," Fuzzy Systems, IEEE Transactions on, No. 2, vol. 8, pp. 186-199, 2002. [59] H. Medhaffar, N. Derbel and T. Damak, "A decoupled fuzzy indirect adaptive sliding mode controller with application to robot manipulator," International Journal of Modelling, Identification and Control, No. 1, vol. 1, pp. 23-29, 2006. [60] Y. Guo and P. Y. Woo, "An adaptive fuzzy sliding mode controller for robotic manipulators," Systems, Man and Cybernetics, Part A: Systems and Humans, IEEE Transactions on, No. 2, vol. 33, pp. 149-159, 2003. [61] C. M. Lin and C. F. Hsu, "Adaptive fuzzy sliding-mode control for induction servomotor systems," Energy Conversion, IEEE Transactions on, No. 2, vol. 19, pp. 362-368, 2004. [62] N. Sulaiman, Z. A. Obaid, M. Marhaban and M. Hamidon , "Design and Implementation of FPGA-Based Systems-A Review," Australian Journal of Basic and Applied Sciences, No. 4, vol. 3, pp. 3575-3596, 2009.](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-42-2048.jpg)
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 148 [63] X. Shao and D. Sun, "Development of an FPGA-based motion control ASIC for robotic manipulators," IEEE Conference , 2006, pp. 8221-8225. [64] Y. S. Kung, K. Tseng, C. Chen, H. Sze and A. Wang, "FPGA-implementation of inverse kinematics and servo controller for robot manipulator," Proc. IEEE Int. on Robotics and Biomimetics, pp. 1163–1168, 2006. [65] X. Shao, D. Sun and J. K. Mills, "A new motion control hardware architecture with FPGA- based IC design for robotic manipulators," IEEE Conference, 2006, pp. 3520-3525. [66] Y. S. Kung, C. S. Chen and G. S. Shu, "Design and Implementation of a Servo System for Robotic Manipulator," CACS, 2005. [67] U. D. Meshram and R. Harkare, "FPGA Based Five Axis Robot Arm Controller," IEEE Conference, 2005, pp. 3520-3525. [68] U. Meshram, P. Bande, P. Dwaramwar and R. Harkare, "Robot arm controller using FPGA," IEEE Conference, 2009, pp. 8-11. [69] Y. S. Kung and G. S. Shu, "Development of a FPGA-based motion control IC for robot arm," IEEE Conference, 2006, pp. 1397-1402. [70] Z. A. Obaid, N. Sulaiman and M. Hamidon, "Developed Method of FPGA-based Fuzzy Logic Controller Design with the Aid of Conventional PID Algorithm," Australian Journal of Basic and Applied Sciences, No. 3, vol. 3, pp. 2724-2740, 2009. [71] S. T. Karris, Digital circuit analysis and design with Simulink modeling and introduction to CPLDs and FPGAs: Orchard Pubns, 2007. [72] K. D. Rogers, "Acceleration and implementation of a DSP phase-based frequency estimation algorithm: MATLAB/SIMULINK to FPGA via XILINX system generator," Citeseer, 2004. [73] F. J. Lin, D. H. Wang and P. K. Huang, "FPGA-based fuzzy sliding-mode control for a linear induction motor drive," IEEE journal of electrical power application, No. 5, Vol. 152, 2005, pp. 1137-1148. [74] R. R. Ramos, D. Biel, E. Fossas and F. Guinjoan, "A fixed-frequency quasi-sliding control algorithm: application to power inverters design by means of FPGA implementation," Power Electronics, IEEE Transactions on, No. 1, vol. 18, pp. 344-355, 2003. [75] Xiaosong. Lu, "An investigation of adaptive fuzzy sliding mode control for robot manipulator," Carleton university Ottawa,2007. [76] S. Lentijo, S. Pytel, A. Monti, J. Hudgins, E. Santi and G. Simin, "FPGA based sliding mode control for high frequency power converters," IEEE Conference, 2004, pp. 3588-3592. [77] B. S. R. Armstrong, "Dynamics for robot control: friction modeling and ensuring excitation during parameter identification," 1988. [78] C. L. Clover, "Control system design for robots used in simulating dynamic force and moment interaction in virtual reality applications," 1996. [79] K. R. Horspool, Cartesian-space Adaptive Control for Dual-arm Force Control Using Industrial Robots: University of New Mexico, 2003.](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-43-2048.jpg)
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 149 [80] B. Armstrong, O. Khatib and J. Burdick, "The explicit dynamic model and inertial parameters of the PUMA 560 arm," IEEE Conference, 2002, pp. 510-518. [81] P. I. Corke and B. Armstrong-Helouvry, "A search for consensus among model parameters reported for the PUMA 560 robot," IEEE Conference, 2002, pp. 1608-1613. [82] Farzin Piltan, N. Sulaiman, M. H. Marhaban, Adel Nowzary, Mostafa Tohidian,” “Design of FPGA based sliding mode controller for robot manipulator,” International Journal of Robotic and Automation, 2 (3): 183-204, 2011. [83] I. Eksin, M. Guzelkaya and S. Tokat, "Sliding surface slope adjustment in fuzzy sliding mode controller," Mediterranean Conference, 2002, pp. 160-168. [84] Samira Soltani & Farzin Piltan, “Design Artificial Nonlinear Controller Based on Computed Torque like Controller with Tunable Gain”. World Applied Science Journal,14 (9): 1306- 1312, 2011. [85] Farzin Piltan, H. Rezaie, B. Boroomand, Arman Jahed,” Design robust back stepping online tuning feedback linearization control applied to IC engine,” International Journal of Advance Science and Technology, 42: 183-204, 2012. [86] Farzin Piltan, I. Nazari, S. Siamak, P. Ferdosali ,”Methodology of FPGA-based mathematical error-based tuning sliding mode controller” International Journal of Control and Automation, 5(1): 89-110, 2012. [87] Farzin Piltan, M. A. Dialame, A. Zare, A. Badri ,”Design Novel Lookup table changed Auto Tuning FSMC: Applied to Robot Manipulator” International Journal of Engineering, 6(1): 25-40, 2012. [88] Farzin Piltan, B. Boroomand, A. Jahed, H. Rezaie ,”Methodology of Mathematical Error- Based Tuning Sliding Mode Controller” International Journal of Engineering, 6(2): 96-112, 2012. [89] Farzin Piltan, F. Aghayari, M. R. Rashidian, M. Shamsodini, ”A New Estimate Sliding Mode Fuzzy Controller for Robotic Manipulator” International Journal of Robotics and Automation, 3(1): 45-58, 2012. [90] Farzin Piltan, M. Keshavarz, A. Badri, A. Zargari , ”Design novel nonlinear controller applied to robot manipulator: design new feedback linearization fuzzy controller with minimum rule base tuning method” International Journal of Robotics and Automation, 3(1): 1-18, 2012. [91] Piltan, F., et al. "Design sliding mode controller for robot manipulator with artificial tunable gain". Canaidian Journal of pure and applied science, 5 (2), 1573-1579, 2011. [92] Farzin Piltan, A. Hosainpour, E. Mazlomian, M.Shamsodini, M.H Yarmahmoudi. ”Online Tuning Chattering Free Sliding Mode Fuzzy Control Design: Lyapunov Approach” International Journal of Robotics and Automation, 3(3): 2012. [93] Farzin Piltan , M.H. Yarmahmoudi, M. Shamsodini, E.Mazlomian, A.Hosainpour. ” PUMA- 560 Robot Manipulator Position Computed Torque Control Methods Using MATLAB/SIMULINK and Their Integration into Graduate Nonlinear Control and MATLAB Courses” International Journal of Robotics and Automation, 3(3): 2012.](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-44-2048.jpg)
![Farzin Piltan, Sara Emamzadeh, Zahra Hivand, Forouzan Shahriyari & Mina Mirzaei International Journal of Robotic and Automation, (IJRA), Volume (6) : Issue (3) : 2012 150 [94] Farzin Piltan, R. Bayat, F. Aghayari, B. Boroomand. “Design Error-Based Linear Model- Free Evaluation Performance Computed Torque Controller” International Journal of Robotics and Automation, 3(3): 2012. [95] Farzin Piltan, J. Meigolinedjad, S. Mehrara, S. Rahmdel. ” Evaluation Performance of 2 nd Order Nonlinear System: Baseline Control Tunable Gain Sliding Mode Methodology” International Journal of Robotics and Automation, 3(3): 2012. [96] Farzin Piltan, S. Rahmdel, S. Mehrara, R. Bayat.” Sliding Mode Methodology Vs. Computed Torque Methodology Using MATLAB/SIMULINK and Their Integration into Graduate Nonlinear Control Courses” International Journal of Engineering, 3(3): 2012. [97] Farzin Piltan, M. Mirzaie, F. Shahriyari, Iman Nazari & S. Emamzadeh.” Design Baseline Computed Torque Controller” International Journal of Engineering, 3(3): 2012.](https://image.slidesharecdn.com/ijra-81-160308103249/75/PUMA-560-Robot-Manipulator-Position-Sliding-Mode-Control-Methods-Using-MATLAB-SIMULINK-and-Their-Integration-into-Graduate-Undergraduate-Nonlinear-Control-Robotics-and-MATLAB-Courses-45-2048.jpg)