Vis(ion)Match(ers) is a unified API for quickly and easily trying 50+ (and growing!) image matching models.

Jump to: Install | Use | Models | Add a Model / Contributing | Acknowledgements | Cite | Download Stats | Documentation
Compare matching models across various scenes. For example, we show SIFT-LightGlue and LoFTR matches on pairs:
(1) outdoor, (2) indoor, (3) satellite remote sensing, (4) paintings, (5) a false positive, and (6) spherical.
SIFT-LightGlue






LoFTR






You can also extract keypoints and associated descriptors.
SIFT and DeDoDe




vismatch can be installed directly from PyPi. We strongly recommend using uv, but pip should work too
pip install uv # install uv uv venv # create uv venv source .venv/bin/activate # activate uv venv uv pip install vismatch # or, if you don't want to use uv pip install vismatchor, for development, clone this git repo and install with:
# Clone recursively git clone --recursive https://github.com/gmberton/vismatch cd vismatch uv venv # create uv venv source .venv/bin/activate # activate uv venv # editable install for dev work uv pip install -e . # or non-editable install uv pip install .Some models require additional optional dependencies which are not included in the default list, like torch-geometric (required by SphereGlue) and tensorflow/larq (required by OmniGlue/ZippyPoint). To install these, use
uv pip install ".[all]" # or pip install .[all] You can use any of the over 50 matchers simply like this. All model weights are automatically downloaded by vismatch.
from vismatch import get_matcher from vismatch.viz import plot_matches, plot_kpts # Choose any of the 50+ matchers listed below matcher = get_matcher("superpoint-lightglue", device="cuda") img_size = 512 # optional img0 = matcher.load_image("assets/example_pairs/outdoor/montmartre_close.jpg", resize=img_size) img1 = matcher.load_image("assets/example_pairs/outdoor/montmartre_far.jpg", resize=img_size) result = matcher(img0, img1) # result.keys() = ["num_inliers", "H", "all_kpts0", "all_kpts1", "all_desc0", "all_desc1", "matched_kpts0", "matched_kpts1", "inlier_kpts0", "inlier_kpts1"] # This will plot visualizations for matches as shown in the figures above plot_matches(img0, img1, result, save_path="plot_matches.png") # Or you can extract and visualize keypoints as easily as result = matcher.extract(img0) # result.keys() = ["all_kpts0", "all_desc0"] plot_kpts(img0, result, save_path="plot_kpts.png")You can also run matching or extraction as standalone scripts, to get the same results as above.
# if you cloned this repo, vismatch_match.py is available, else see CLI below python vismatch_match.py --matcher superpoint-lightglue --out-dir outputs/superpoint-lightglue --input assets/example_pairs/outdoor/montmartre_close.jpg assets/example_pairs/outdoor/montmartre_far.jpg # or uv run vismatch_match.py --matcher superpoint-lightglue --out-dir outputs/superpoint-lightglue --input assets/example_pairs/outdoor/montmartre_close.jpg assets/example_pairs/outdoor/montmartre_far.jpgFrom any location where an python enviroment with vismatch installed is active, you can also run
# for PyPi install, use CLI entry point vismatch-match --matcher superpoint-lightglue --out-dir outputs/superpoint-lightglue --input path/to/img0 --input path/to/img2# if you cloned this repo, vismatch_extract.py is available, else see CLI below python vismatch_extract.py --matcher superpoint-lightglue --out-dir outputs/superpoint-lightglue --input assets/example_pairs/outdoor/montmartre_close.jpg # or uv run vismatch_extract.py --matcher superpoint-lightglue --out-dir outputs/superpoint-lightglue --input assets/example_pairs/outdoor/montmartre_close.jpgFrom any location where an python enviroment with vismatch installed is active, you can also run
# for PyPi install, use CLI entry point vismatch-extract --matcher superpoint-lightglue --out-dir outputs/superpoint-lightglue --input path/to/img0These scripts can take as input images, folders with multiple images (or multiple pairs of images), or files with pairs of images paths. To see all possible parameters run
python vismatch_match.py -h # or python vismatch_extract.py -hWe support the following methods:
Dense: roma, tiny-roma, duster, master, minima-roma, ufm
Semi-dense: loftr, eloftr, se2loftr, xoftr, minima-loftr, aspanformer, matchformer, xfeat-star, xfeat-star-steerers[-perm/-learned], edm, rdd-star, topicfm[-plus]
Sparse: [sift, superpoint, disk, aliked, dedode, doghardnet, gim, xfeat]-lightglue, dedode, steerers, affine-steerers, xfeat-steerers[-perm/learned], dedode-kornia, [sift, orb, doghardnet]-nn, patch2pix, superglue, r2d2, d2net, gim-dkm, xfeat, omniglue, [dedode, xfeat, aliked]-subpx, [sift, superpoint]-sphereglue, minima-superpoint-lightglue, liftfeat, rdd-[sparse,lightglue, aliked], ripe, lisrd, zippypoint
See Model Details to see runtimes, supported devices, source, and license of each model.
Important: although VisMatch uses a BSD 3-Clause License, the matchers we wrap can have different licenses. Please refer to each matcher's license when using them.
See CONTRIBUTING.md for details. We follow the 1st principle of PyTorch: Usability over Performance
Please see docs at: https://vismatch.readthedocs.io/en/latest/
Special thanks to the authors of all models included in this repo (links in Model Details), and to authors of other libraries we wrap like the Image Matching Toolbox and Kornia.
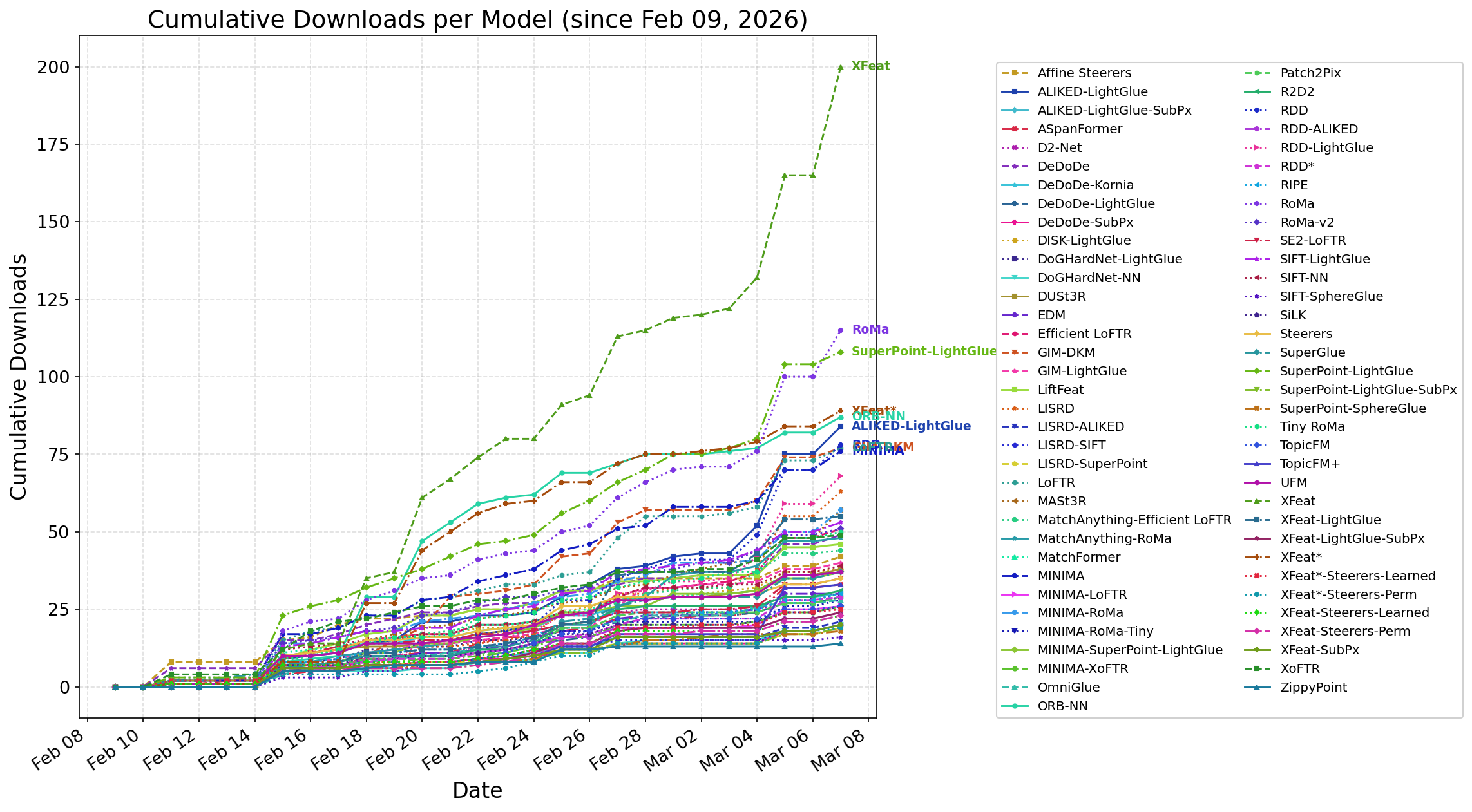
Daily downloads across all vismatch HuggingFace models, updated daily. Click the plot for the interactive version.
This repo was created as part of the EarthMatch paper. Please cite EarthMatch if this repo is helpful to you!
@InProceedings{Berton_2024_EarthMatch, author = {Berton, Gabriele and Goletto, Gabriele and Trivigno, Gabriele and Stoken, Alex and Caputo, Barbara and Masone, Carlo}, title = {EarthMatch: Iterative Coregistration for Fine-grained Localization of Astronaut Photography}, booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops}, month = {June}, year = {2024}, }