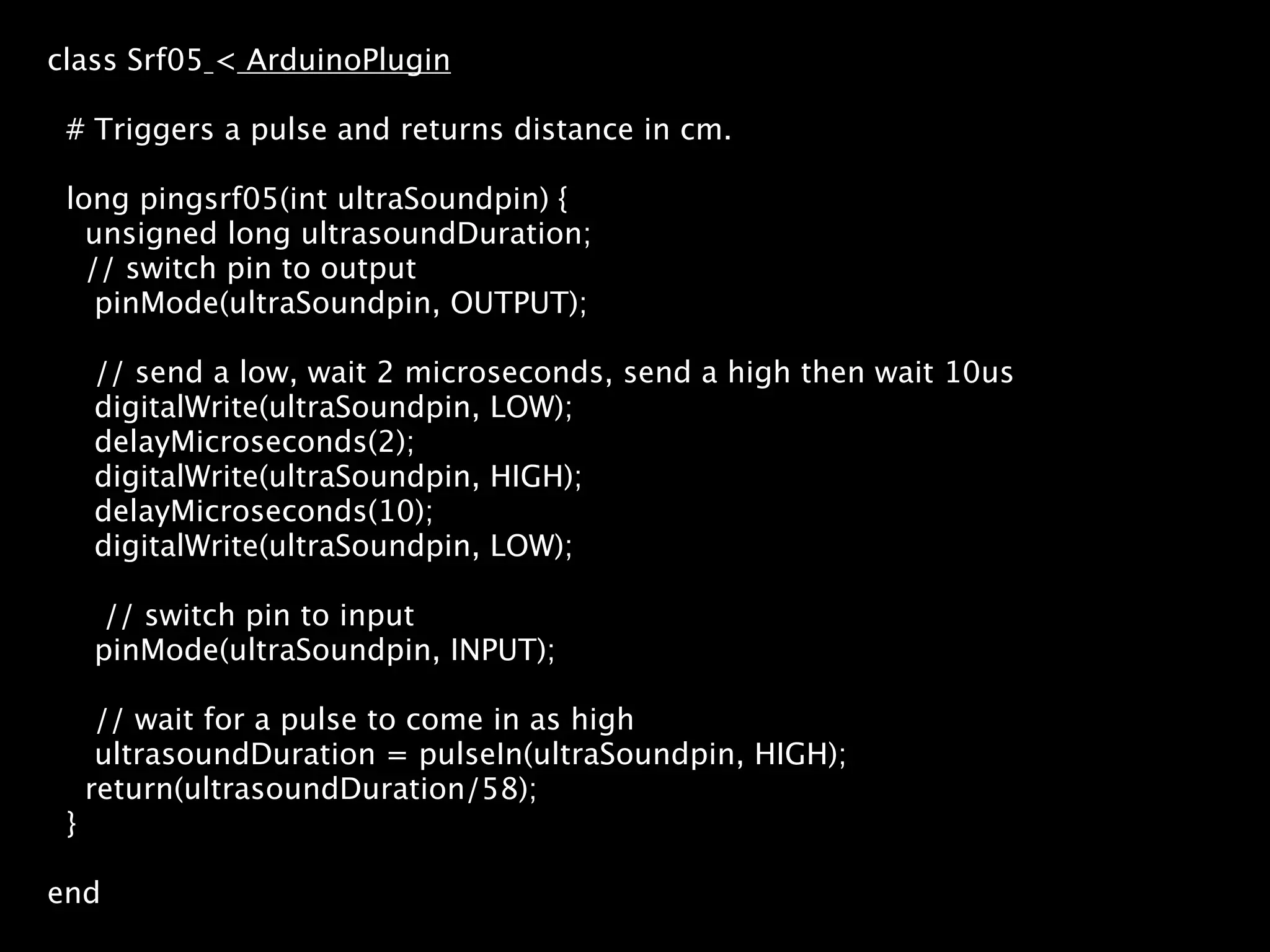
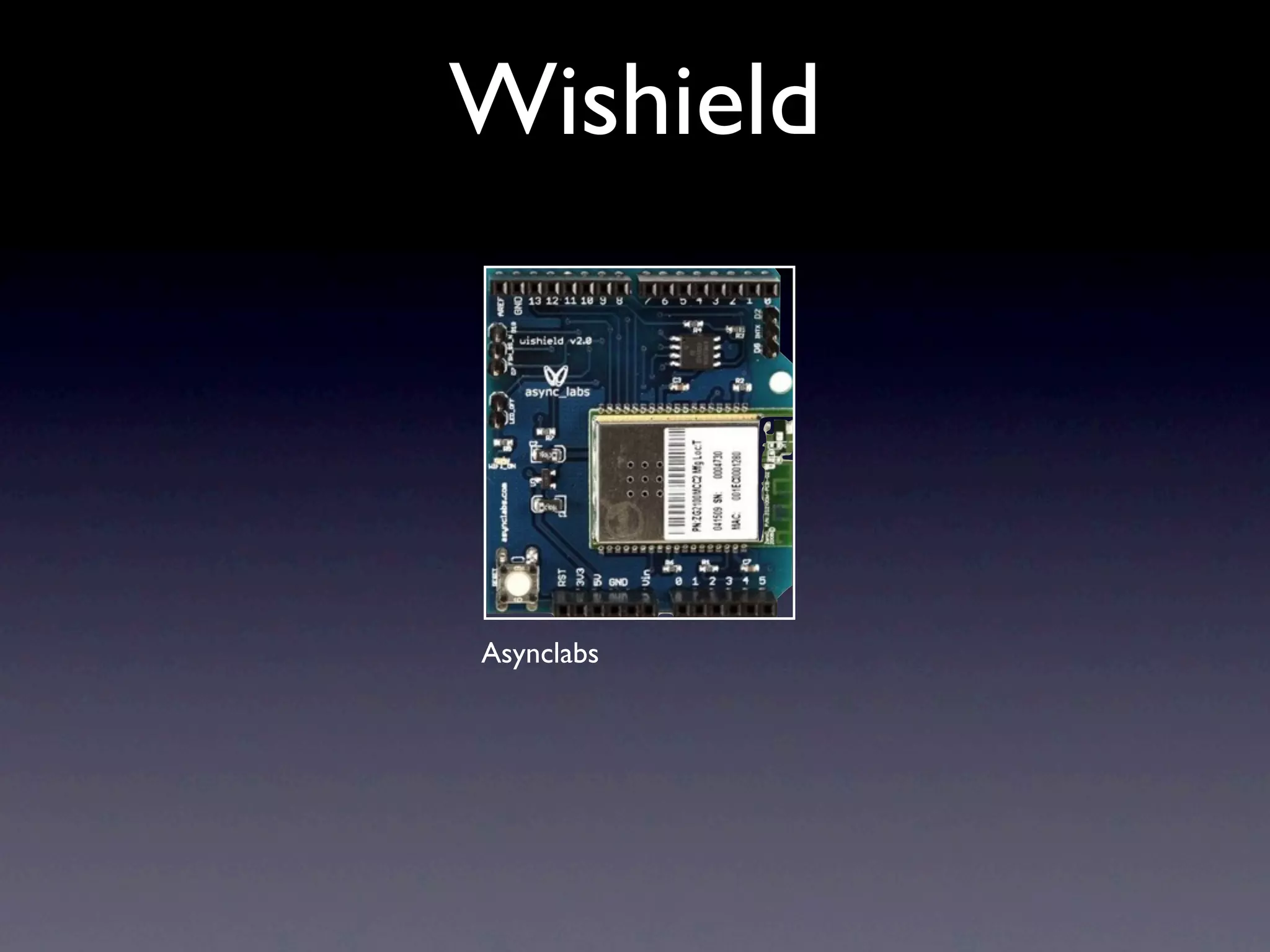
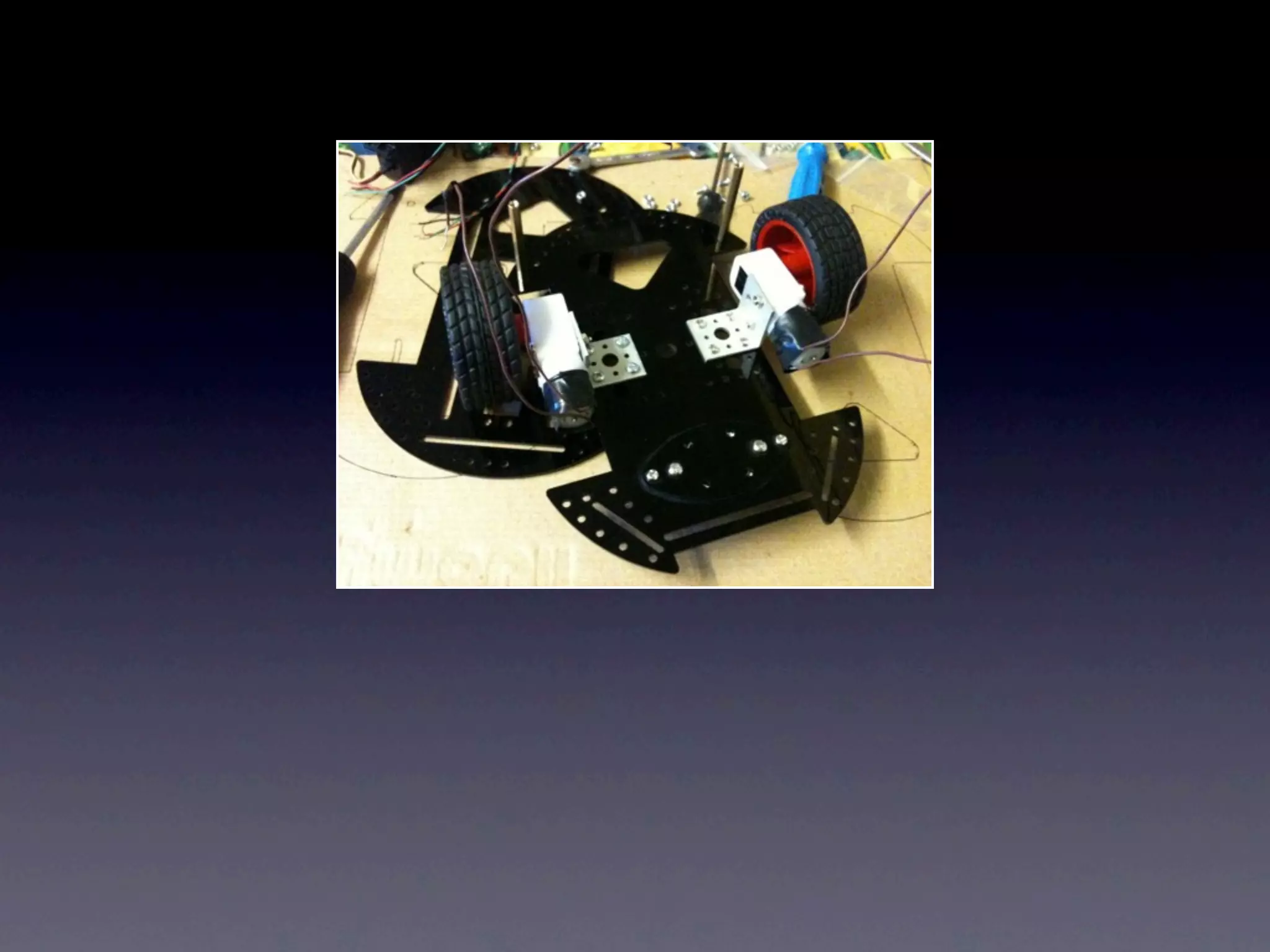
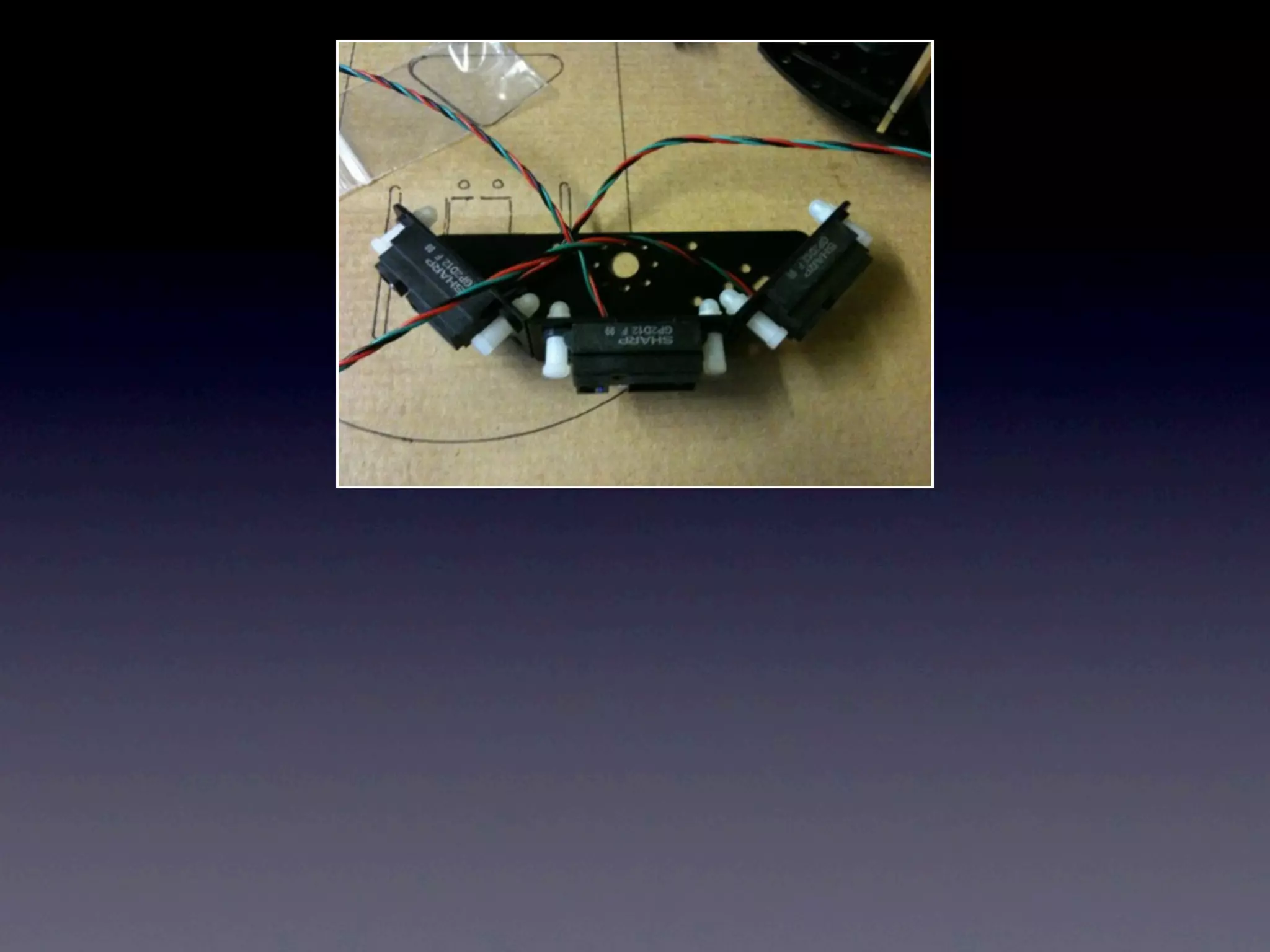
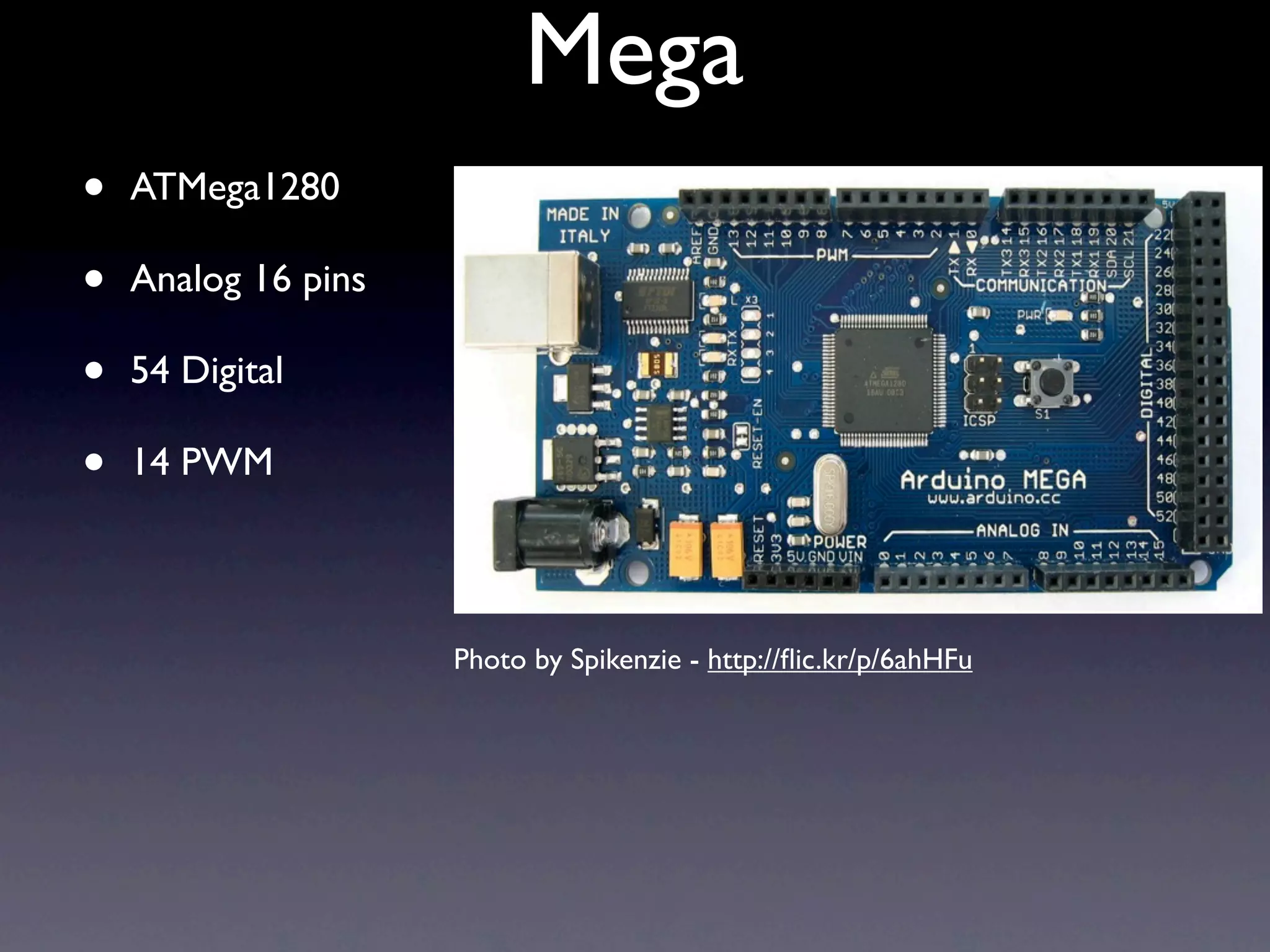
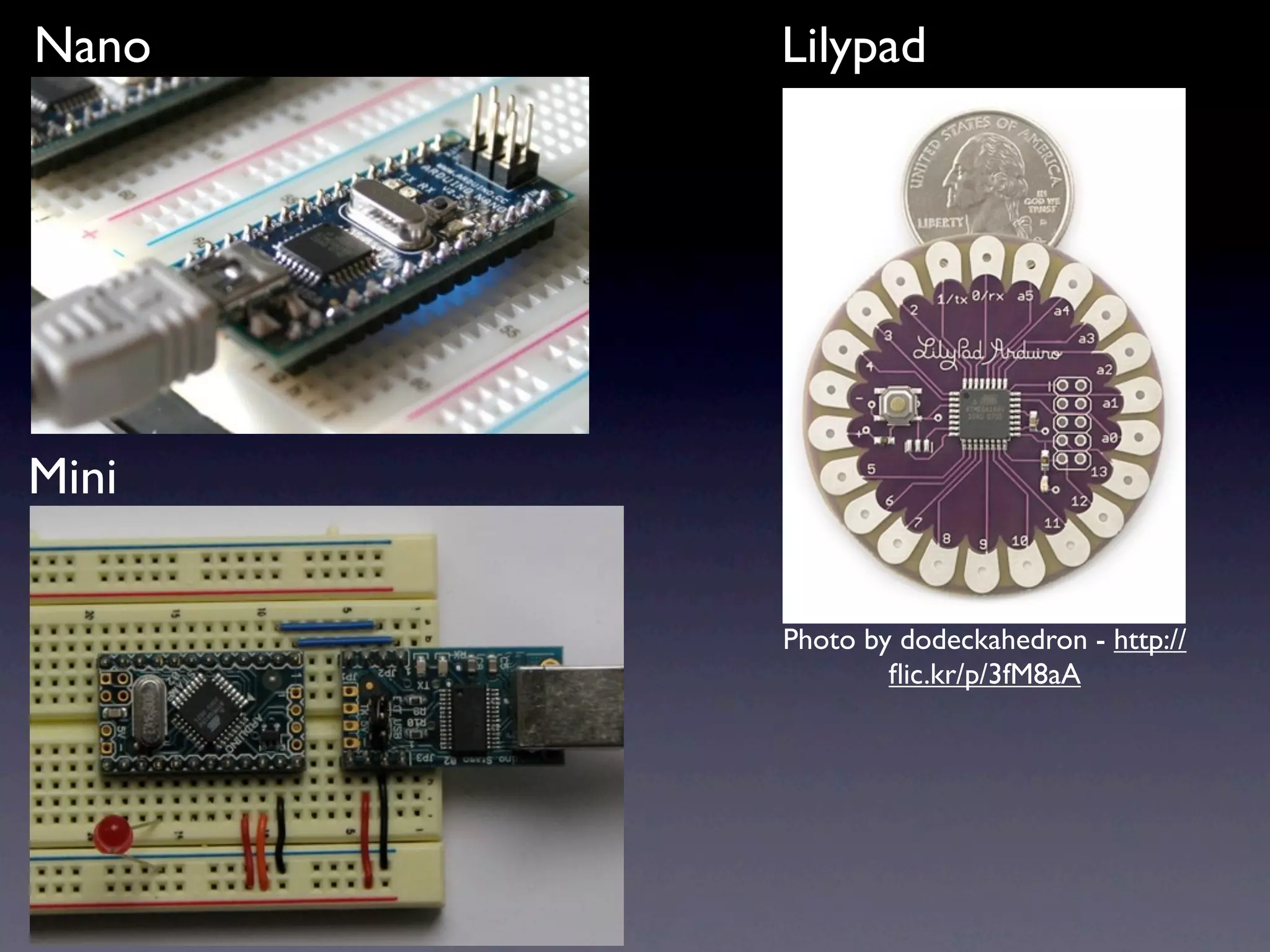
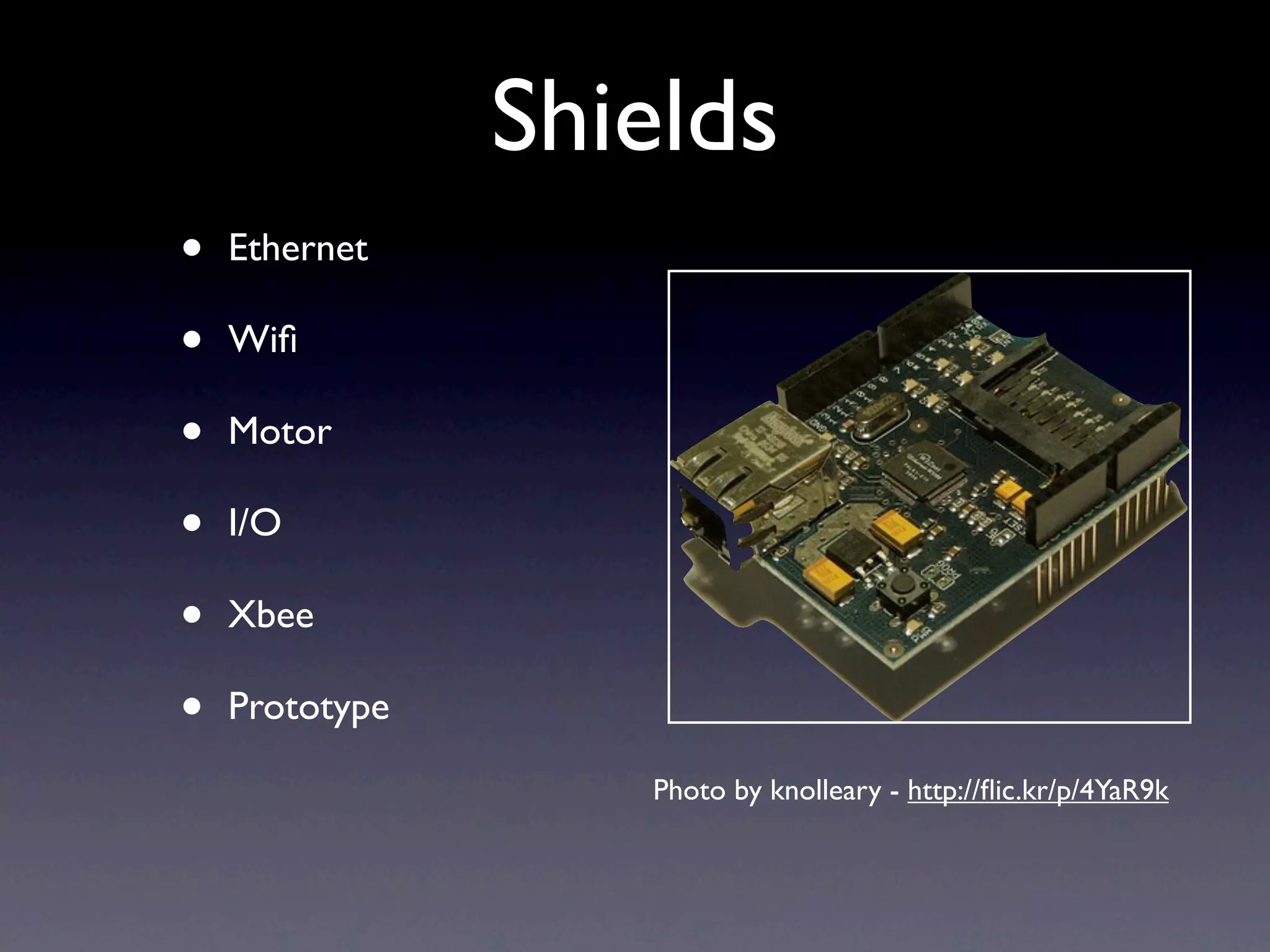
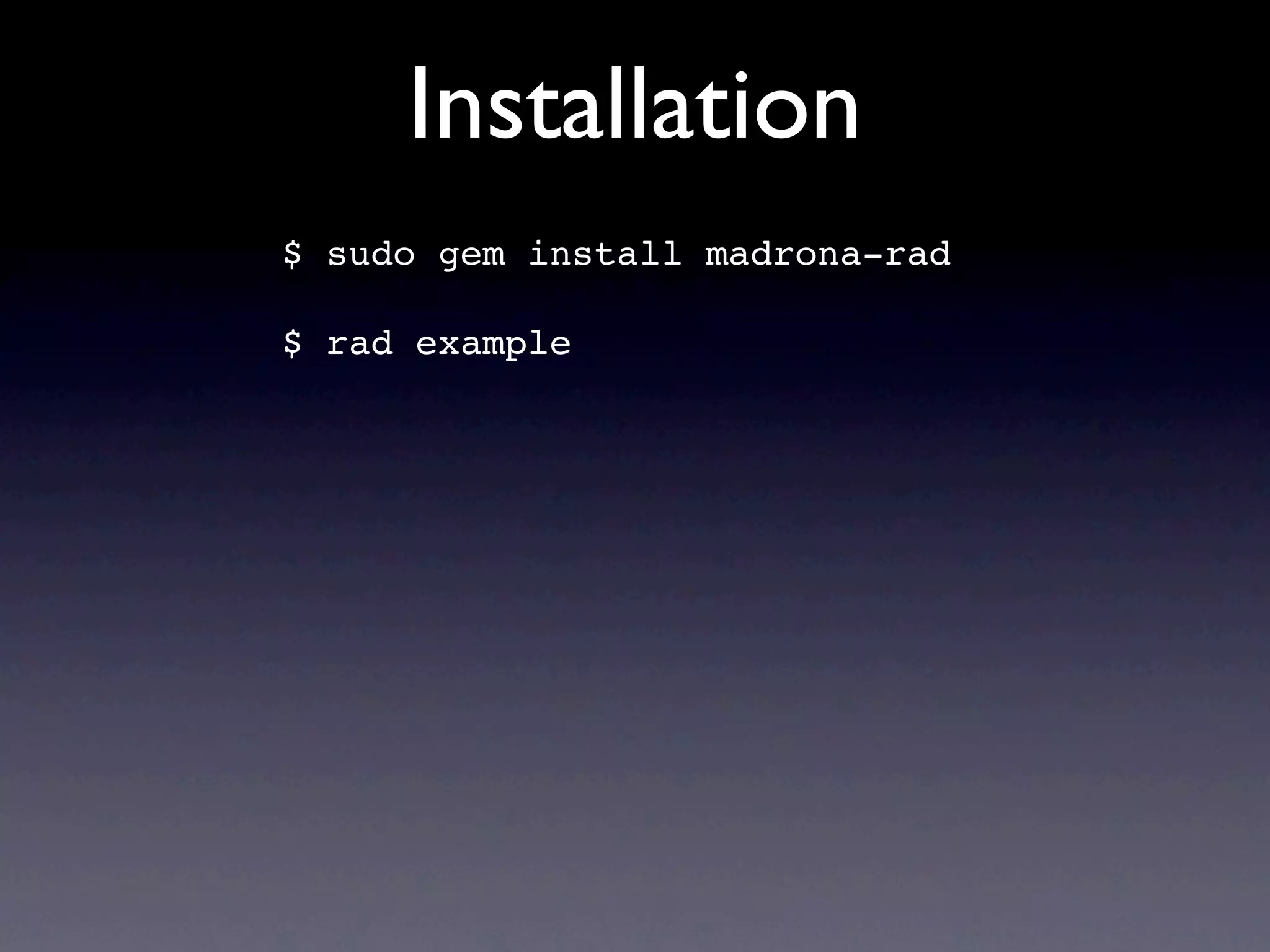
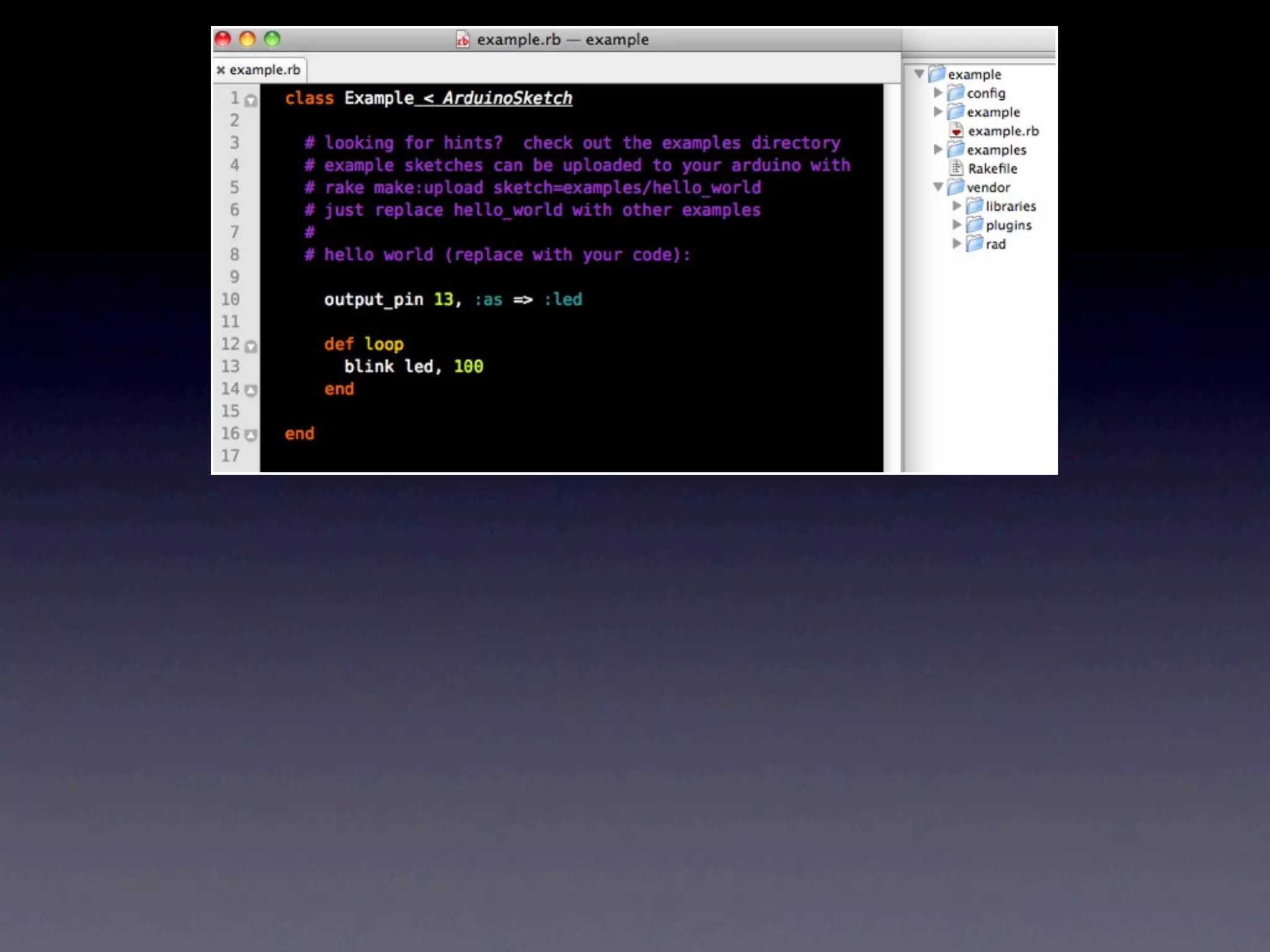
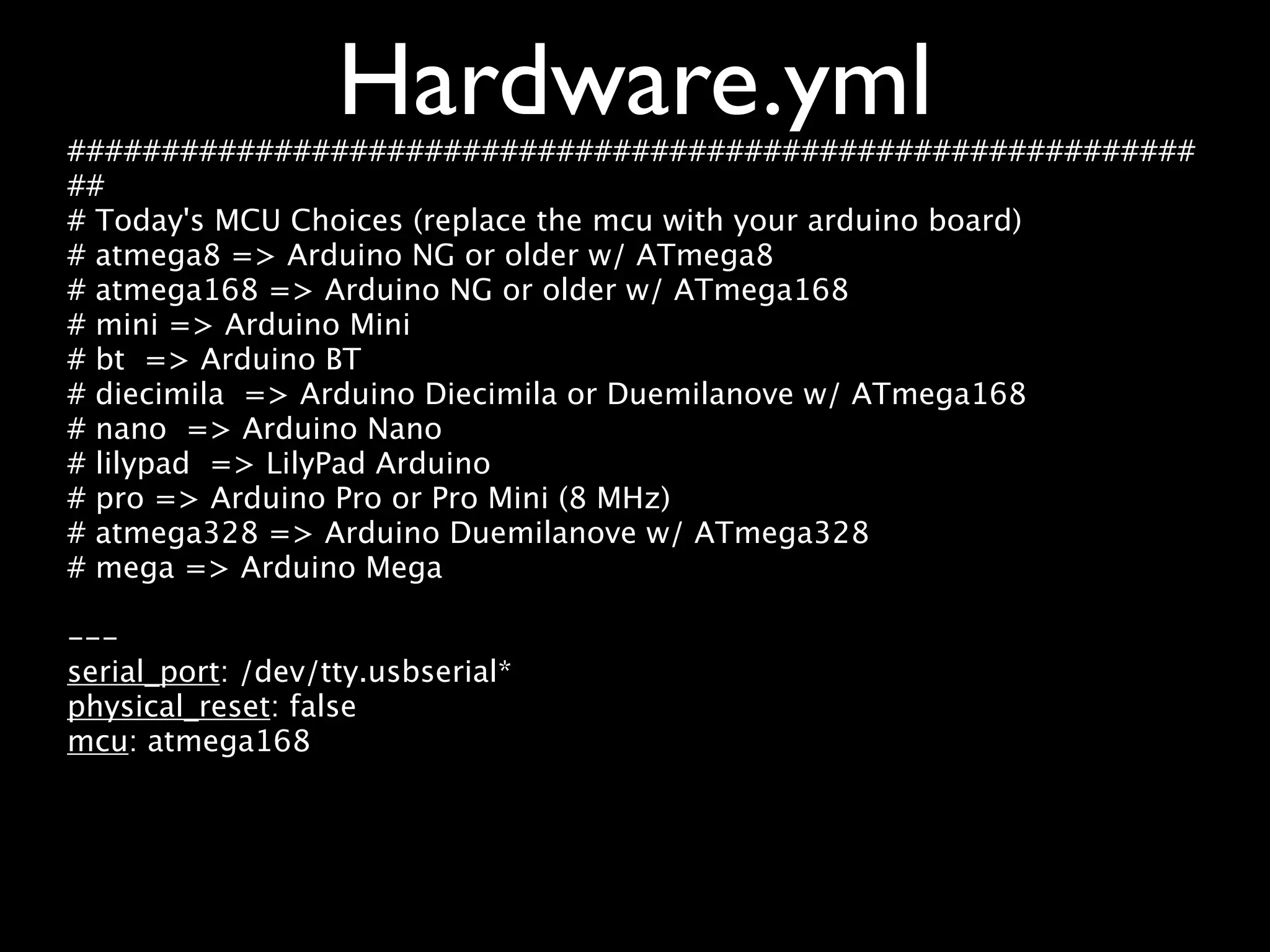
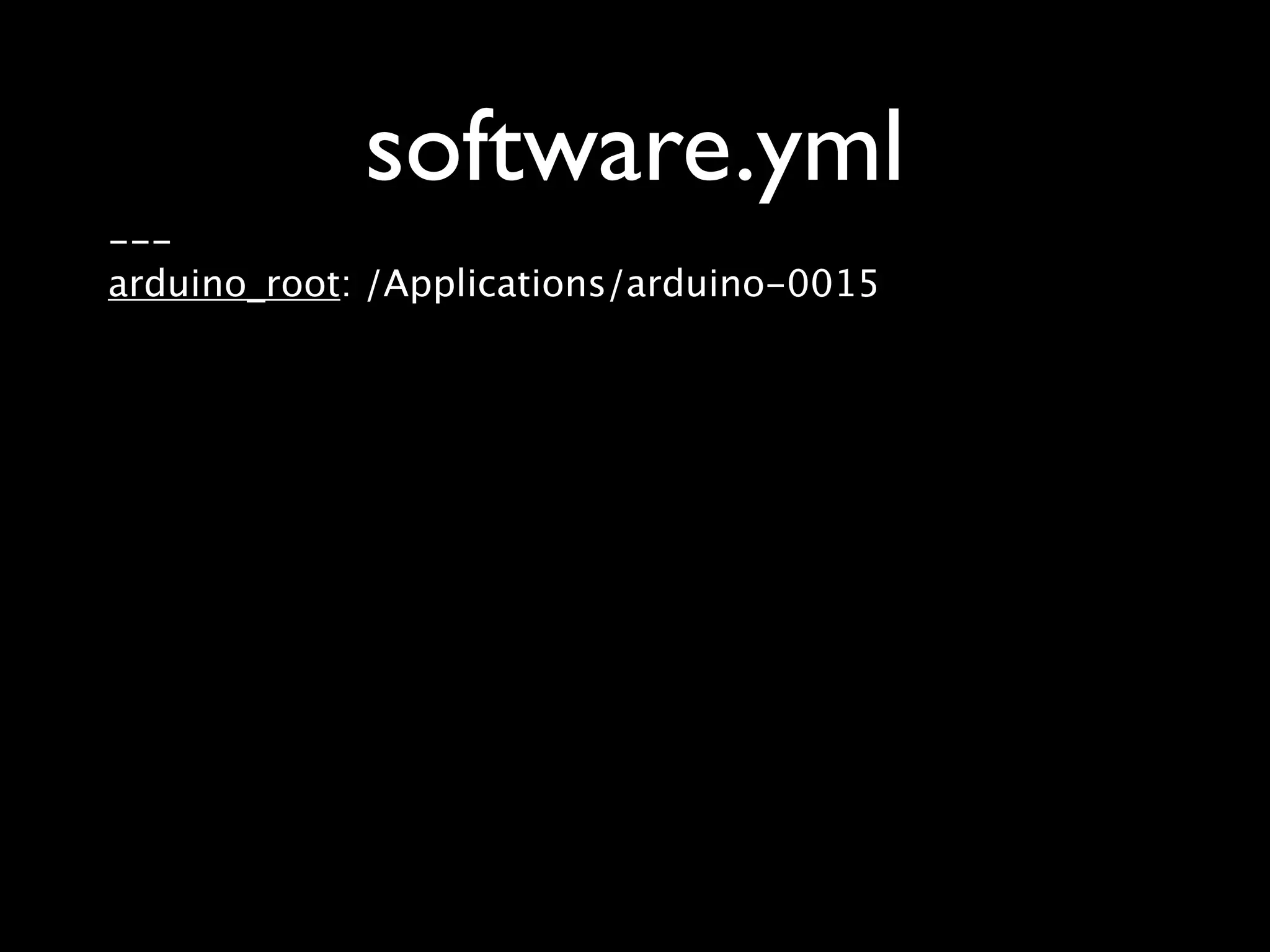
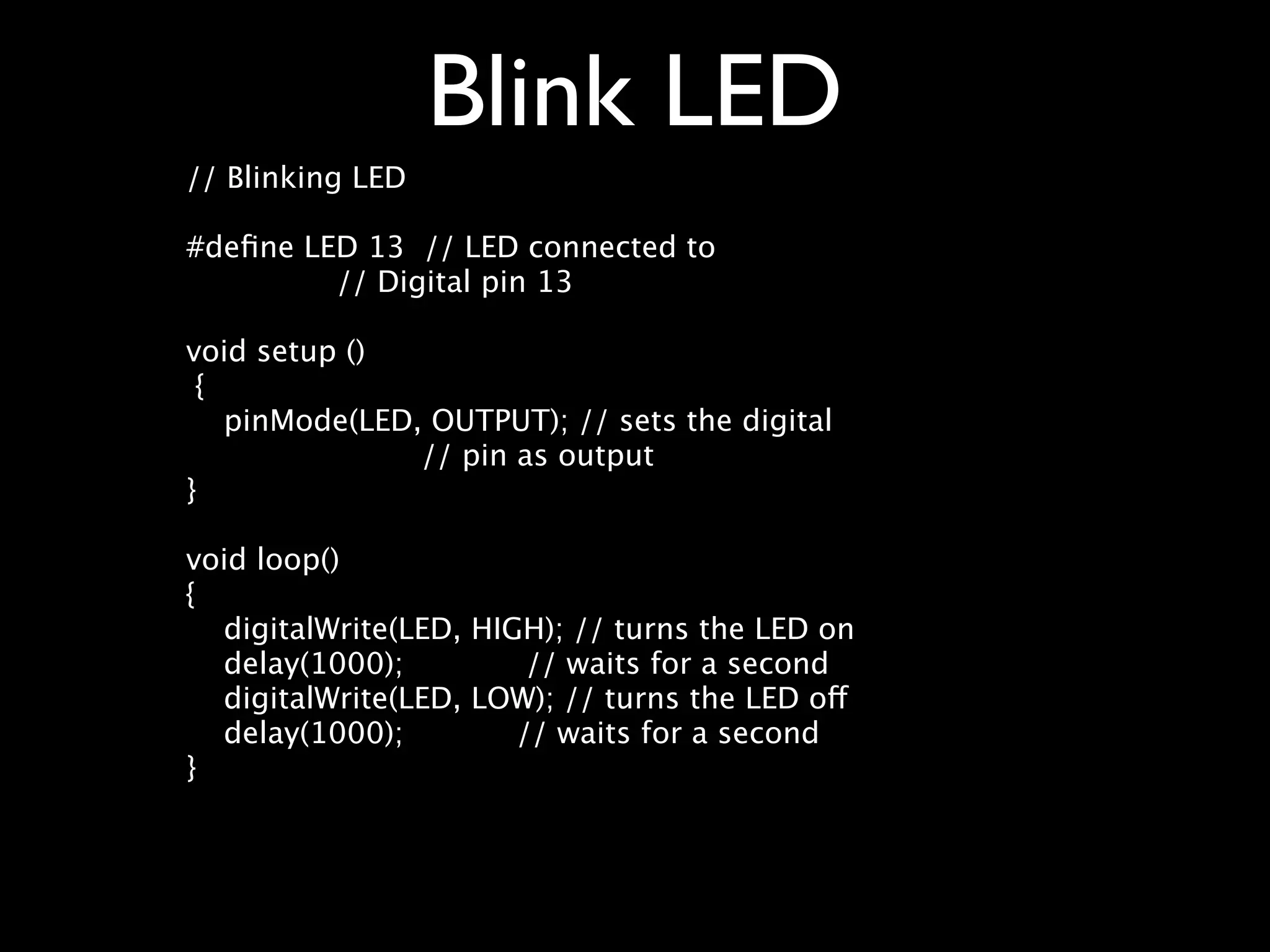
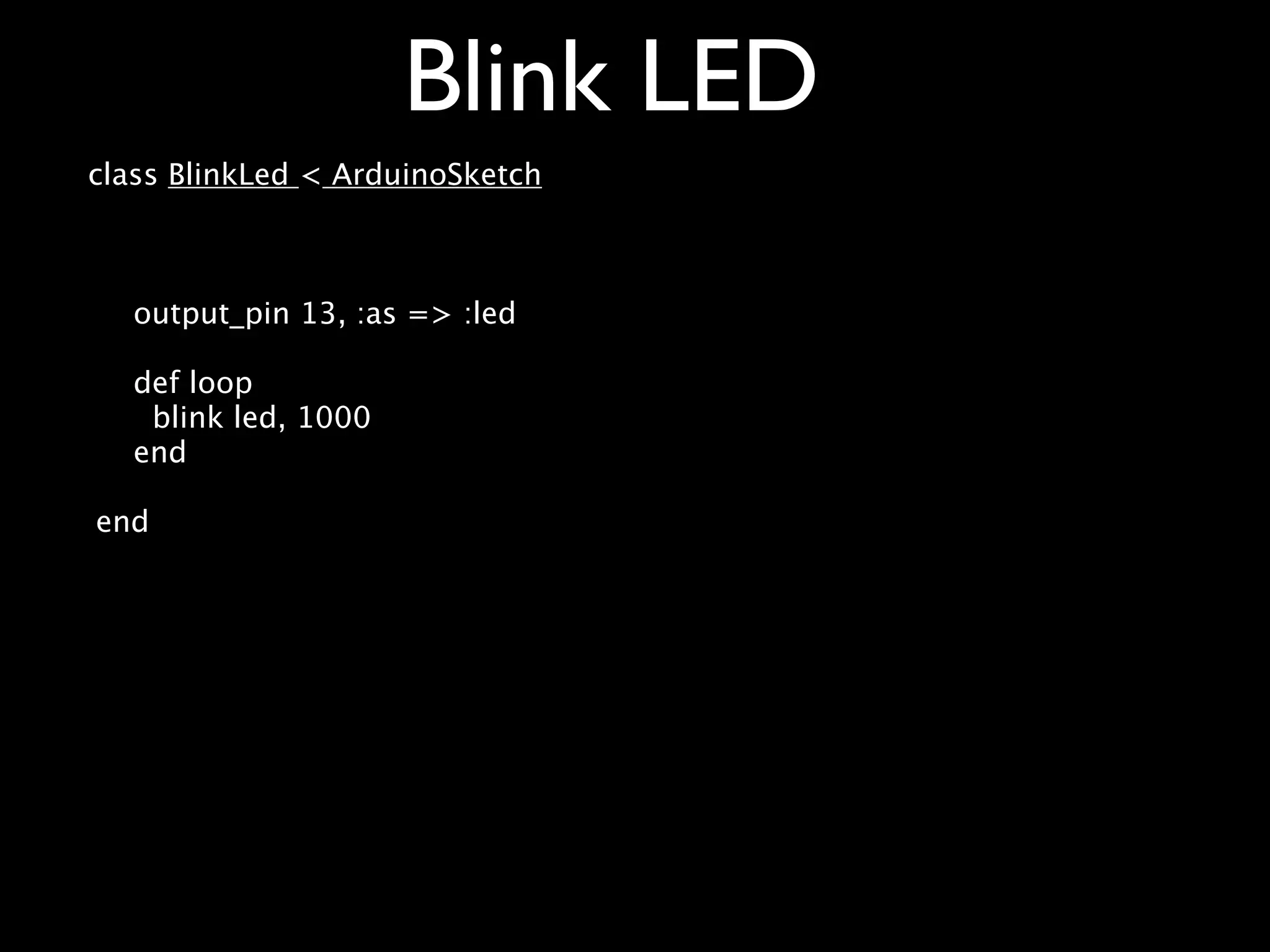
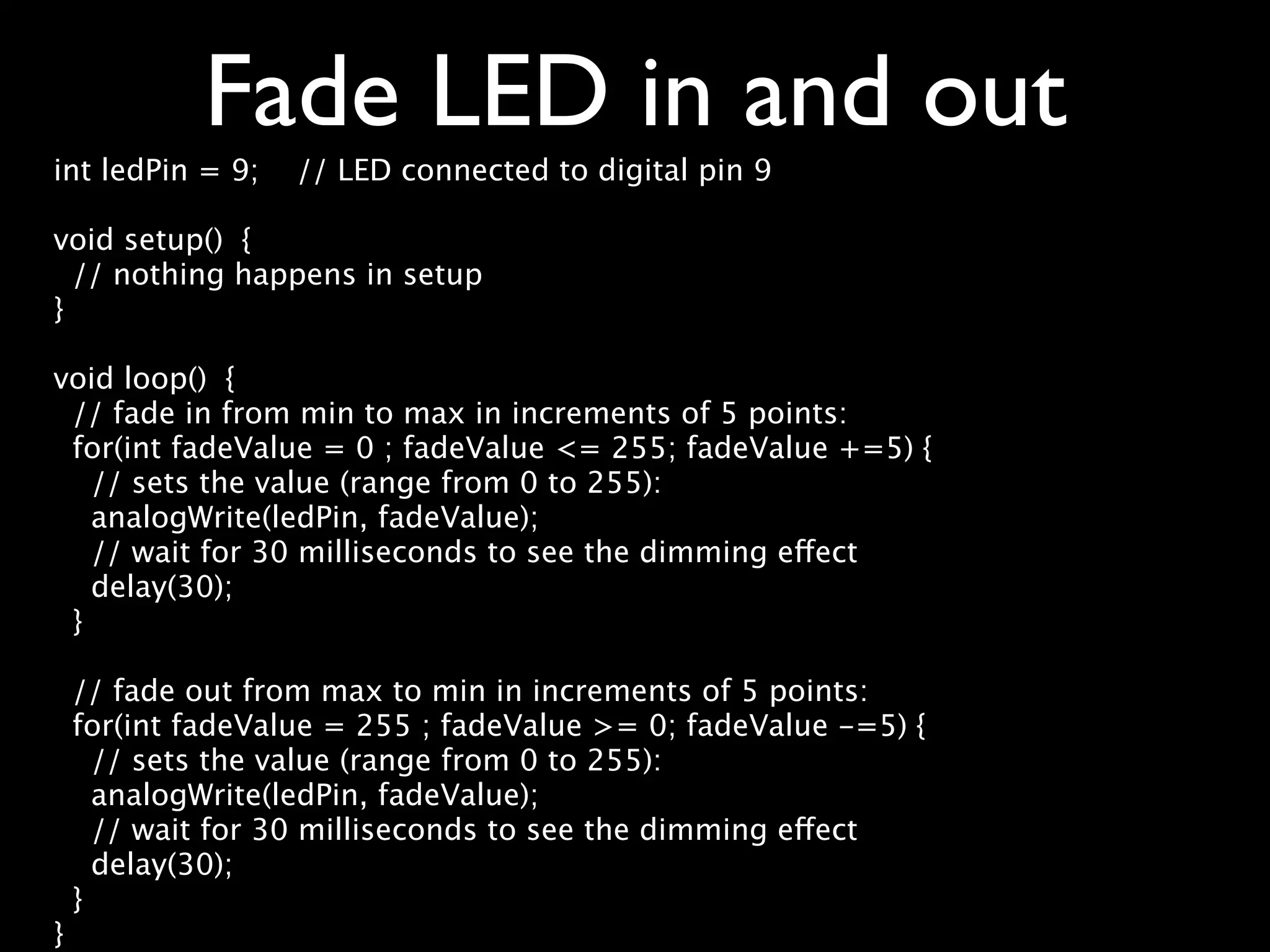
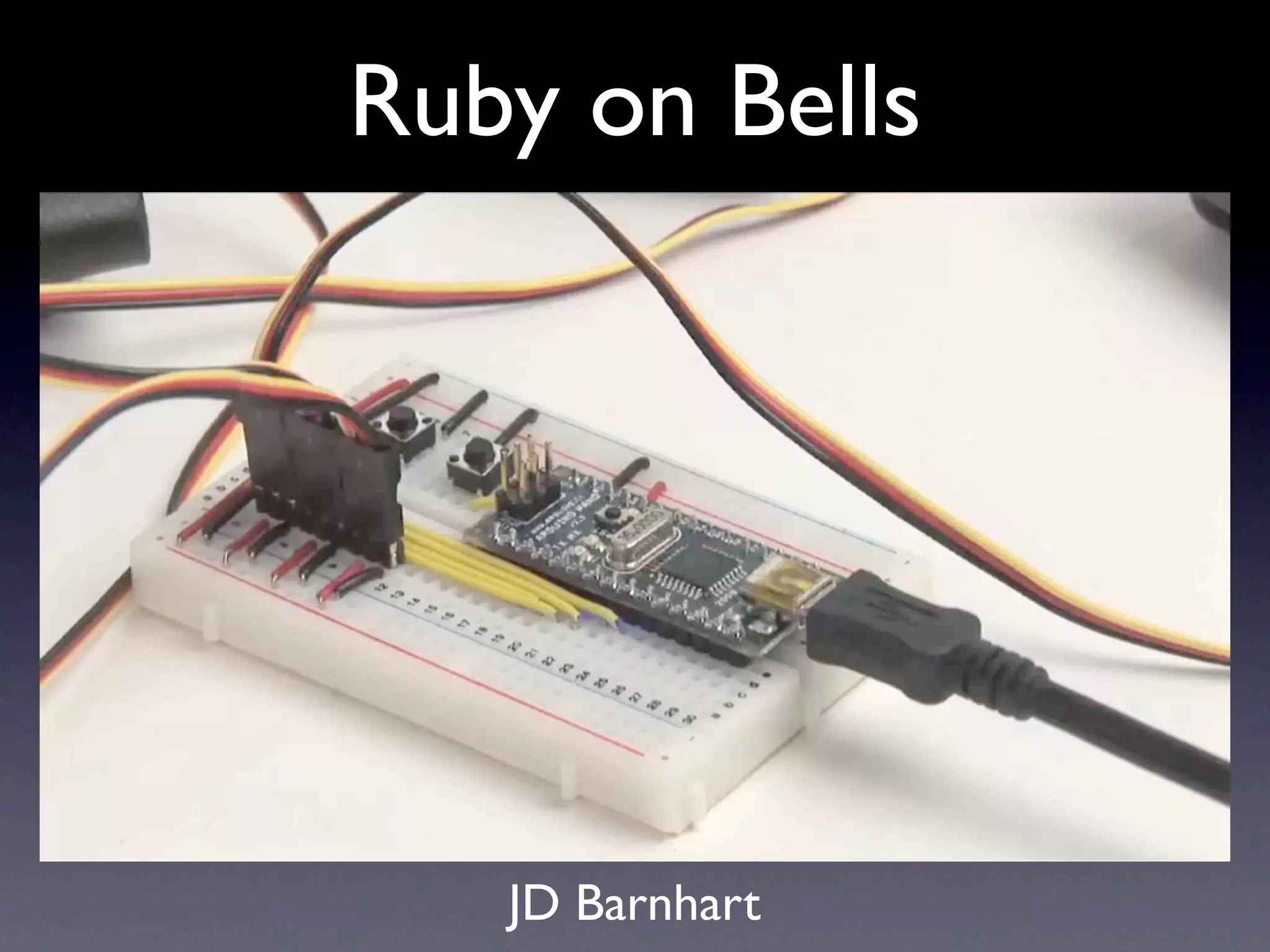
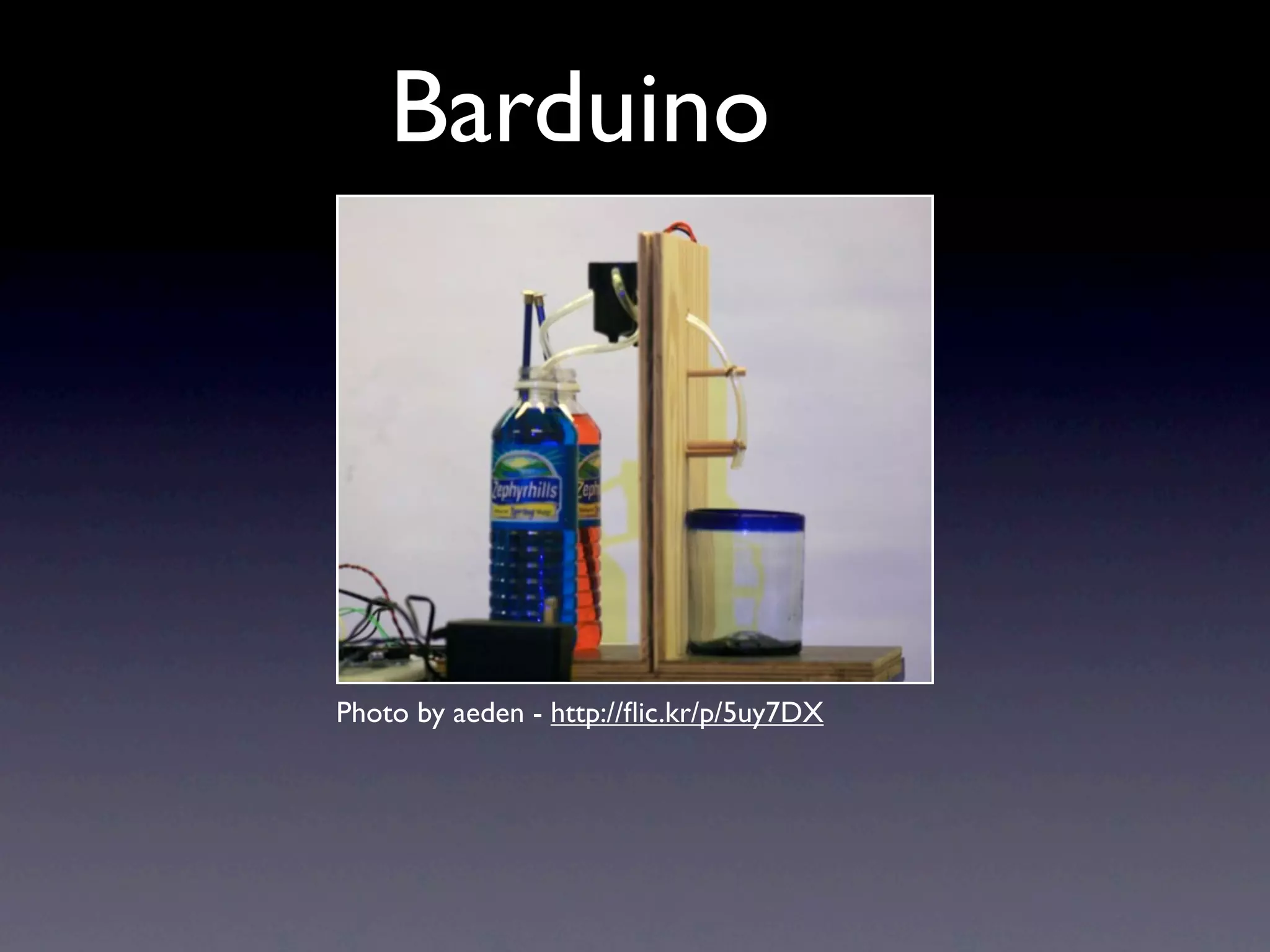
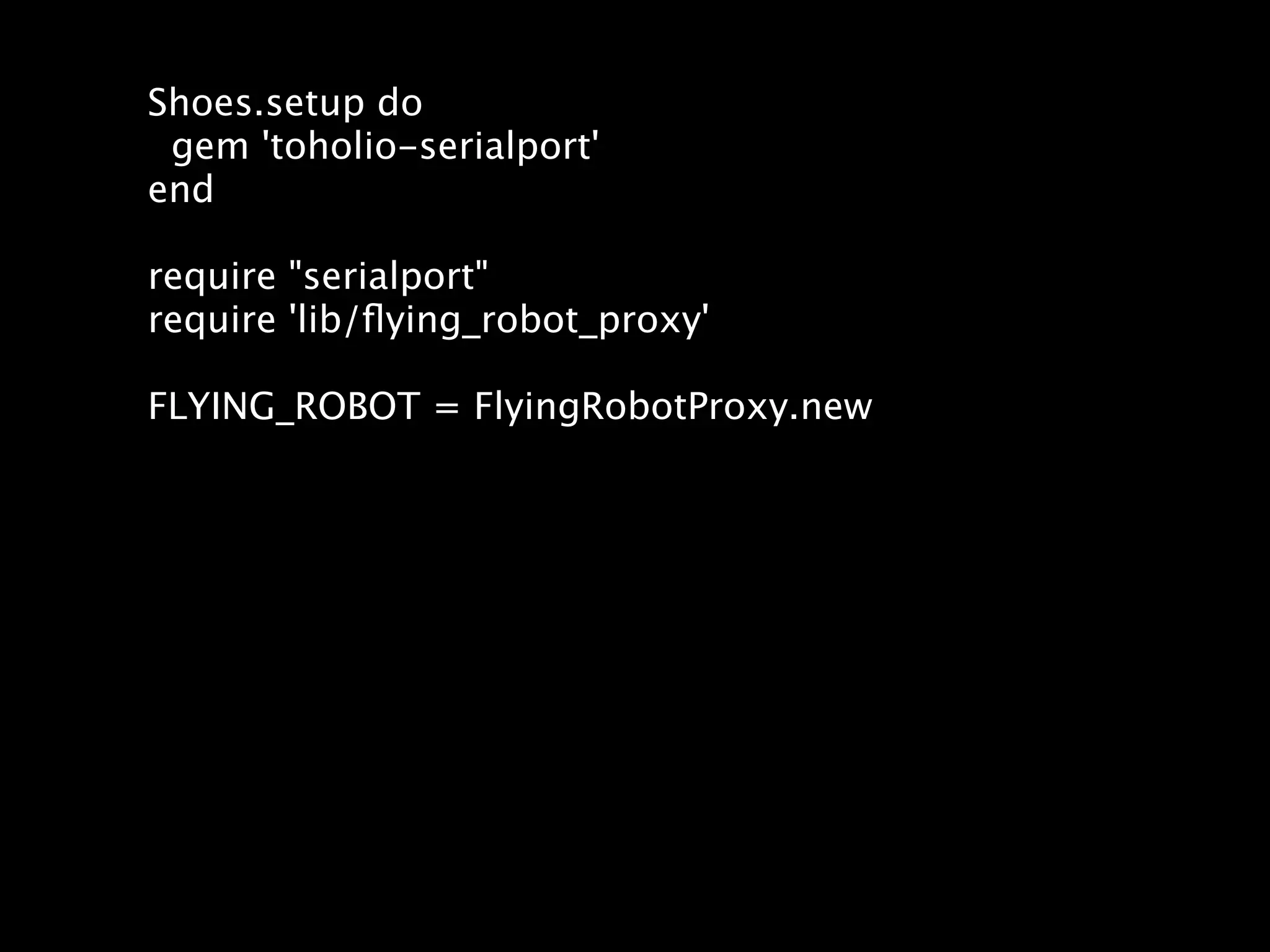
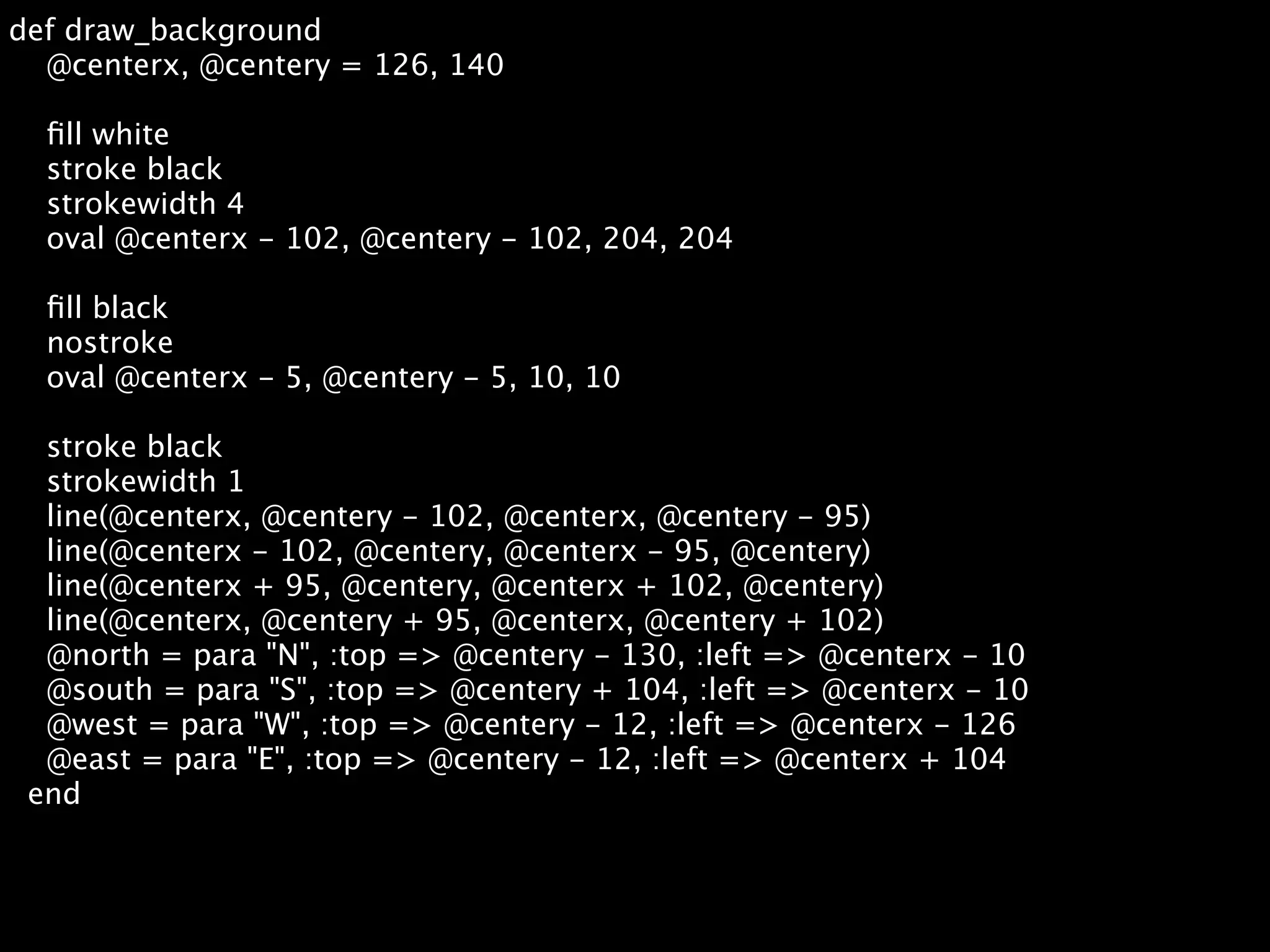
This document discusses using Arduino with Ruby. It provides an overview of Arduino hardware and software, introduces RAD (Ruby Arduino Development) for writing Ruby code to control Arduino boards, and presents several example projects that combine Arduino and Ruby including Ruby on Bells, Barduino, and a Flying Robot. Code examples are provided for blinking an LED, fading an LED, reading an analog sensor, and using servos from Ruby. Additional sensors and shields discussed include Sharp IR sensors, ultrasonic rangefinders, and WiFi shields.



![def draw_compass_hand @centerx, @centery = 126, 140 @current_reading = @compass.to_f #[17, @compass.length].to_f return if @current_reading == 0.0 # the compass is oriented in reverse on the blimpduino, so switch it @current_reading = (@current_reading + 180).modulo(360) _x = 90 * Math.sin( @current_reading * Math::PI / 180 ) _y = 90 * Math.cos( @current_reading * Math::PI / 180 ) stroke black strokewidth 6 line(@centerx, @centery, @centerx + _x, @centery - _y) end](https://image.slidesharecdn.com/rubyconference2010-100401152147-phpapp02/75/Scottish-Ruby-Conference-2010-Arduino-Ruby-RAD-50-2048.jpg)