Divided into 3 categories as Augmented general purpose computers-uses real time operating systems and standard wireless protocols Dedicated embedded sensor nodes provides simple sensor interfaces System on Chip(SoC) build extremely low power
2 Name of theFaculty : Ms D.RADHIKA Designation : Asso Professor Department : Computer Science Contact Number : 9629608765 Programme : MSc Computer Science Batch : 2016-2017 Onwards Semester : IV Course : Wireless Sensor Networks Course Code :P16CS42 Unit : V Topics Covered : Tossim,TinyGALS,Tiny OS,PIECES
3.
Sensor Node Hardware Dividedinto 3 categories as Augmented general purpose computers-uses real time operating systems and standard wireless protocols Dedicated embedded sensor nodes provides simple sensor interfaces System on Chip(SoC) build extremely low power 3
TinyGALS • TinyGALS isa globally asynchronous, locally synchronous model for programming event-driven embedded systems, especially sensor networks • At the local level, software components communicate with each other synchronously via method calls • Components are composed to form modules • At the global level, modules communicate with each other asynchronously via message passing, which separates the flow of control between modules 10
11.
11 •A complementary modelcalled TinyGUYS is a guarded yet synchronous model designed to allow thread-safe sharing of global state between modules without explicitly passing messages •The TinyGALS programming model is structured such that code for all intermodule communication, module triggering mechanisms, and access to guarded global variables can be automatically generated from a high level specification
TOSSIM • TOSSIM isa discrete event simulator for TinyOS sensor networks • Instead of compiling a TinyOS application for a mote, users can compile it into the TOSSIM framework, which runs on a PC • This allows users to debug, test, and analyze algorithms in a controlled and repeatable environment 14
15.
15 • As TOSSIMruns on a PC, users can examine their TinyOS code using debuggers and other development tools •TOSSIM’s primary goal is to provide a high fidelity simulation of TinyOS applications •While TOSSIM can be used to understand the causes of behavior observed in the real world, it does not capture all of them, and should not be used for absolute evaluations
16.
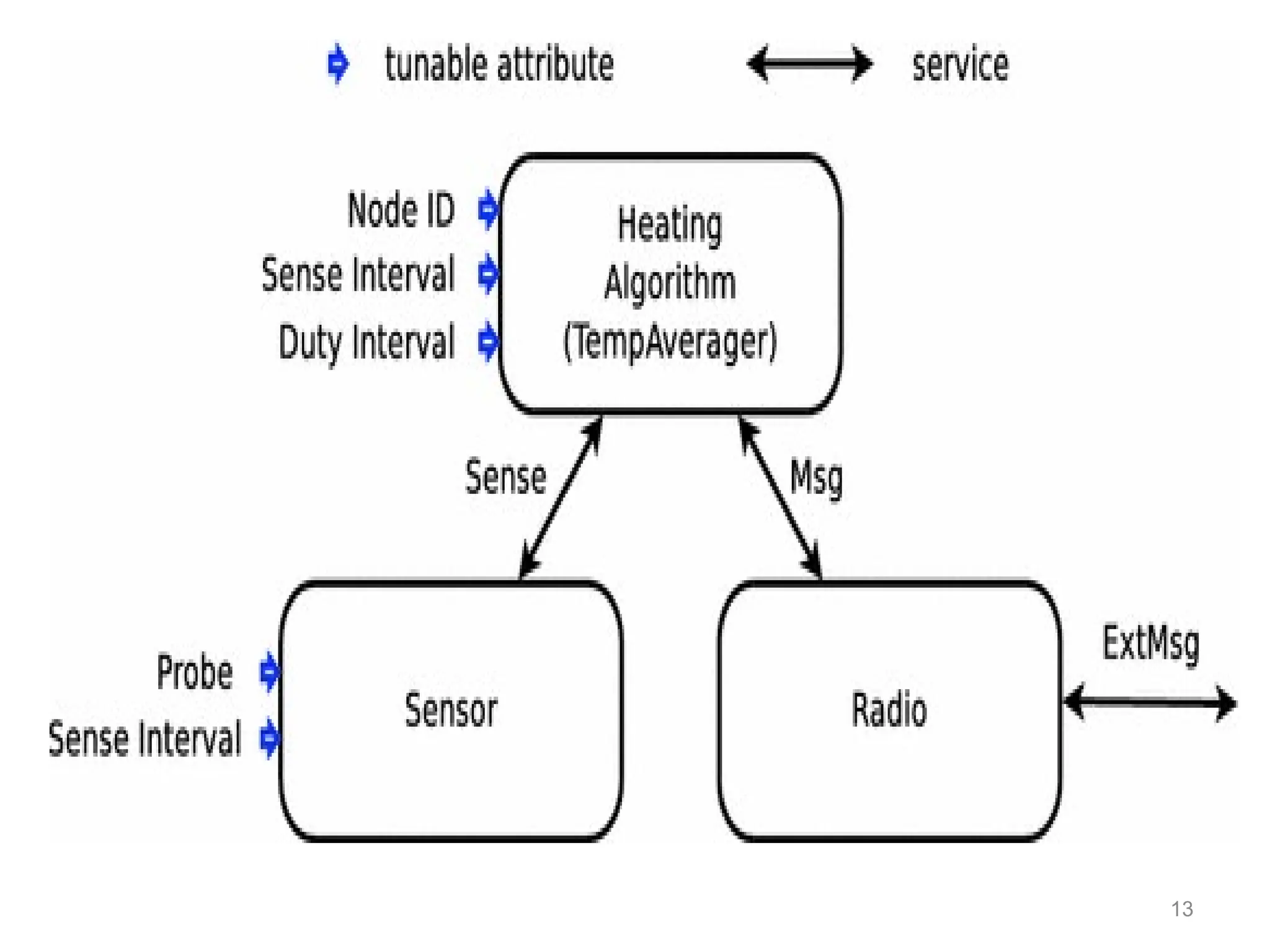
PIECES • Programming andInteraction Environment for Collaborative Embedded Systems • A software framework implements state centric programming to support modeling and simulation • Comprises of Principal and Port agents • A principal is maintaining the state • Also updates state from time to time • A port may be an input,output or both 16
17.
PIECES Simulator • Simulatessensor network applications at high level • Combination of java and matlab • Java is to simulate message passing and agent execution • The signals,noise,target trajectories are simulated by Matlab 17