Download as PDF, PPTX
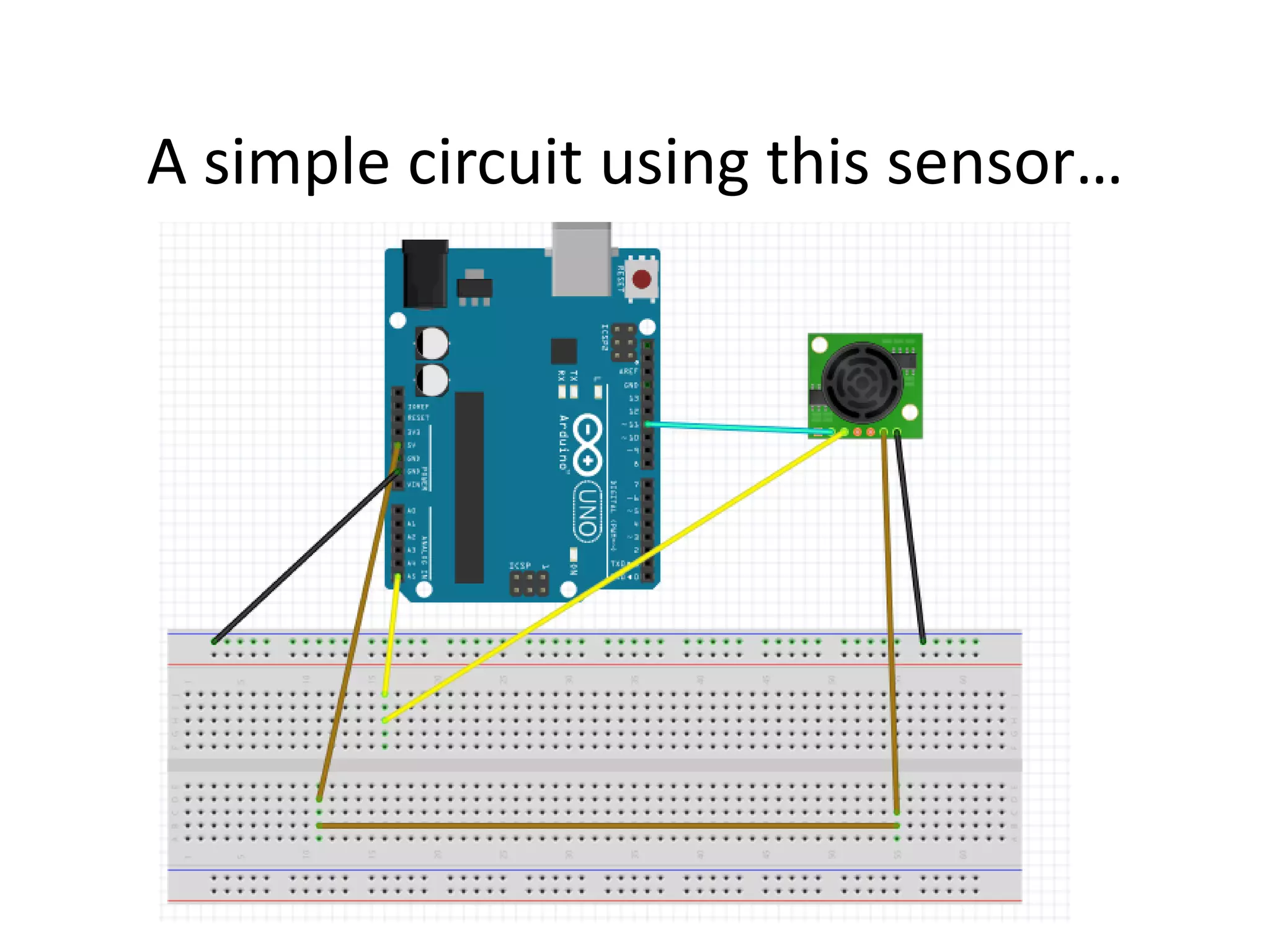
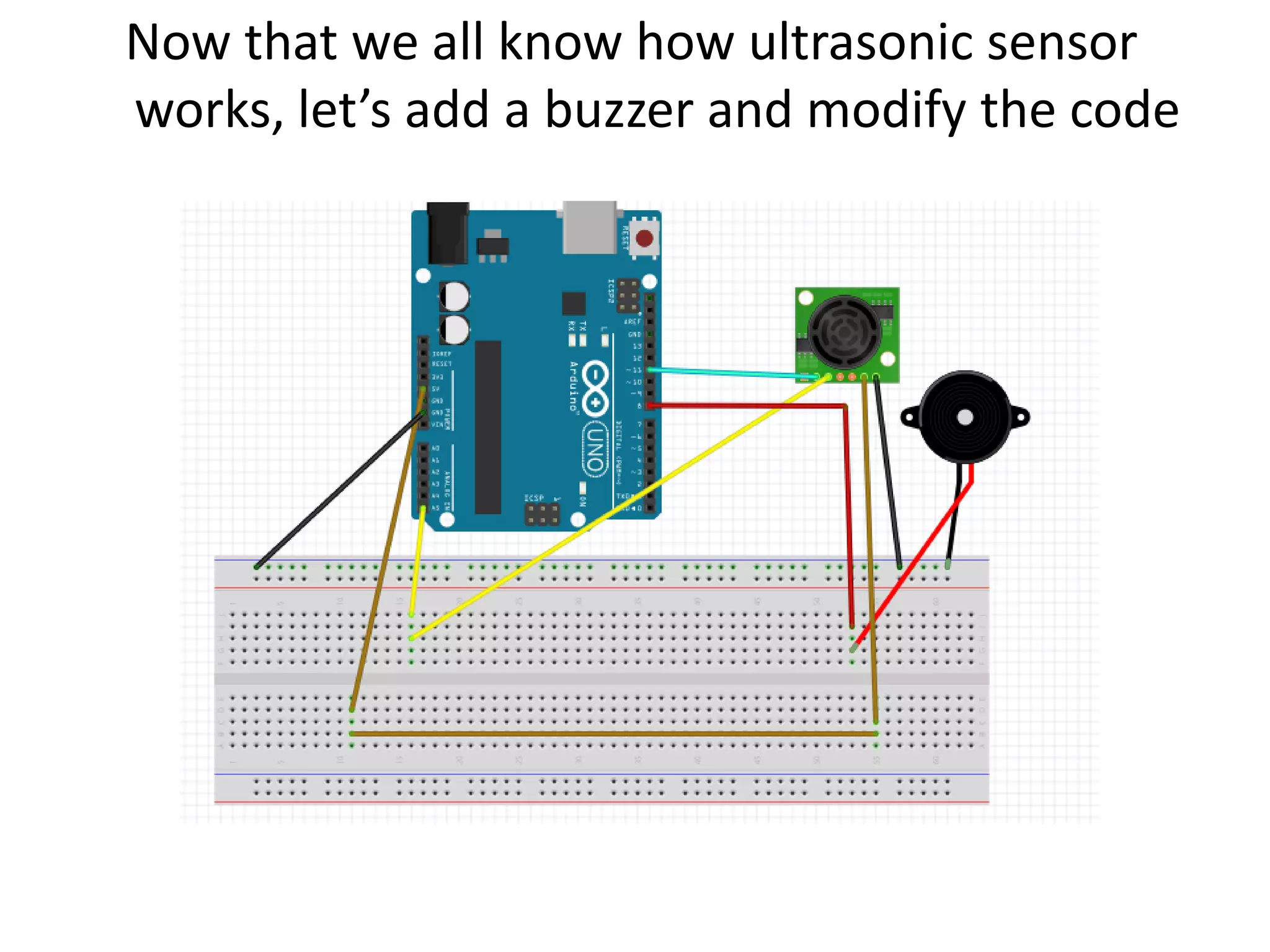
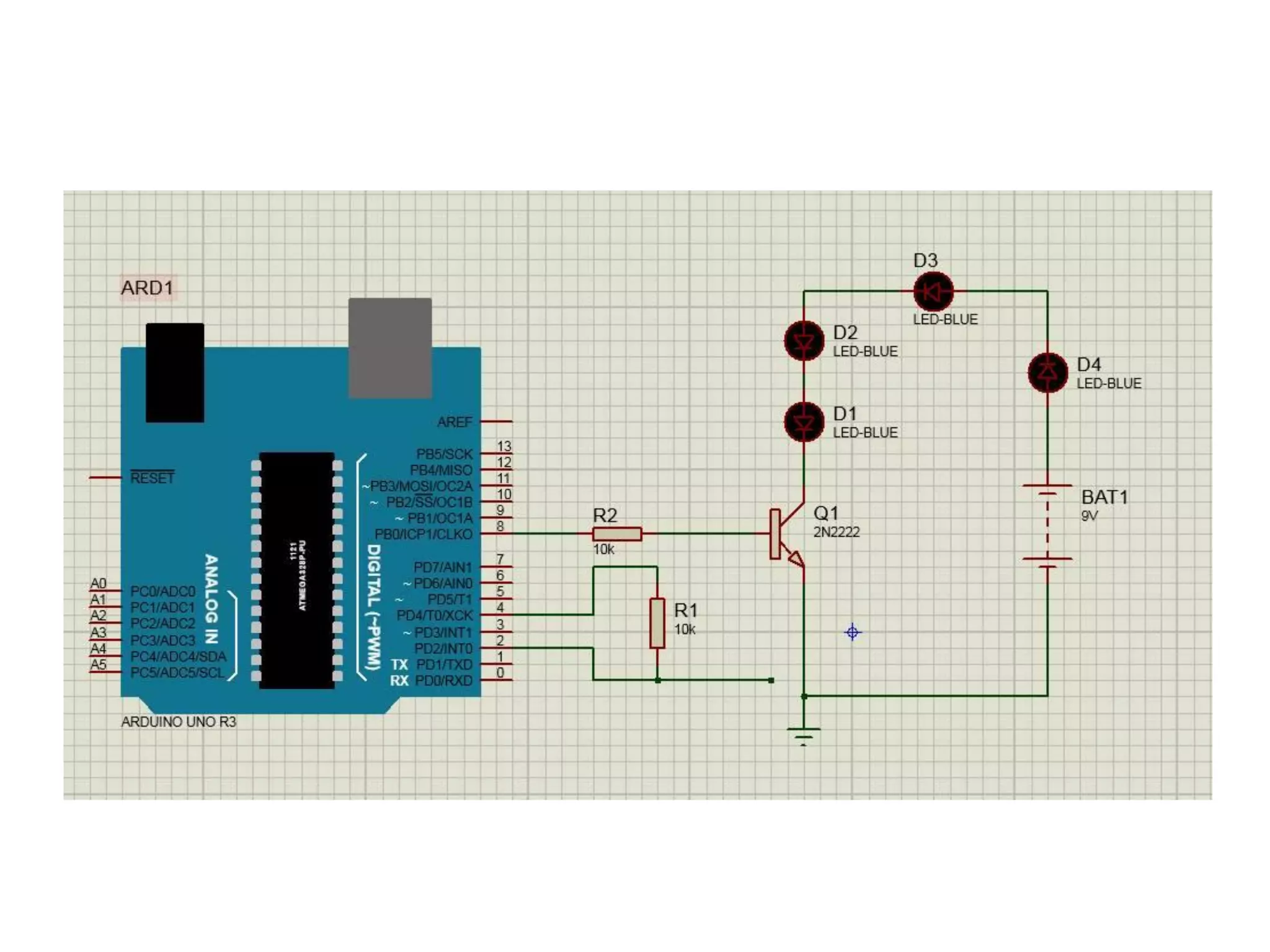
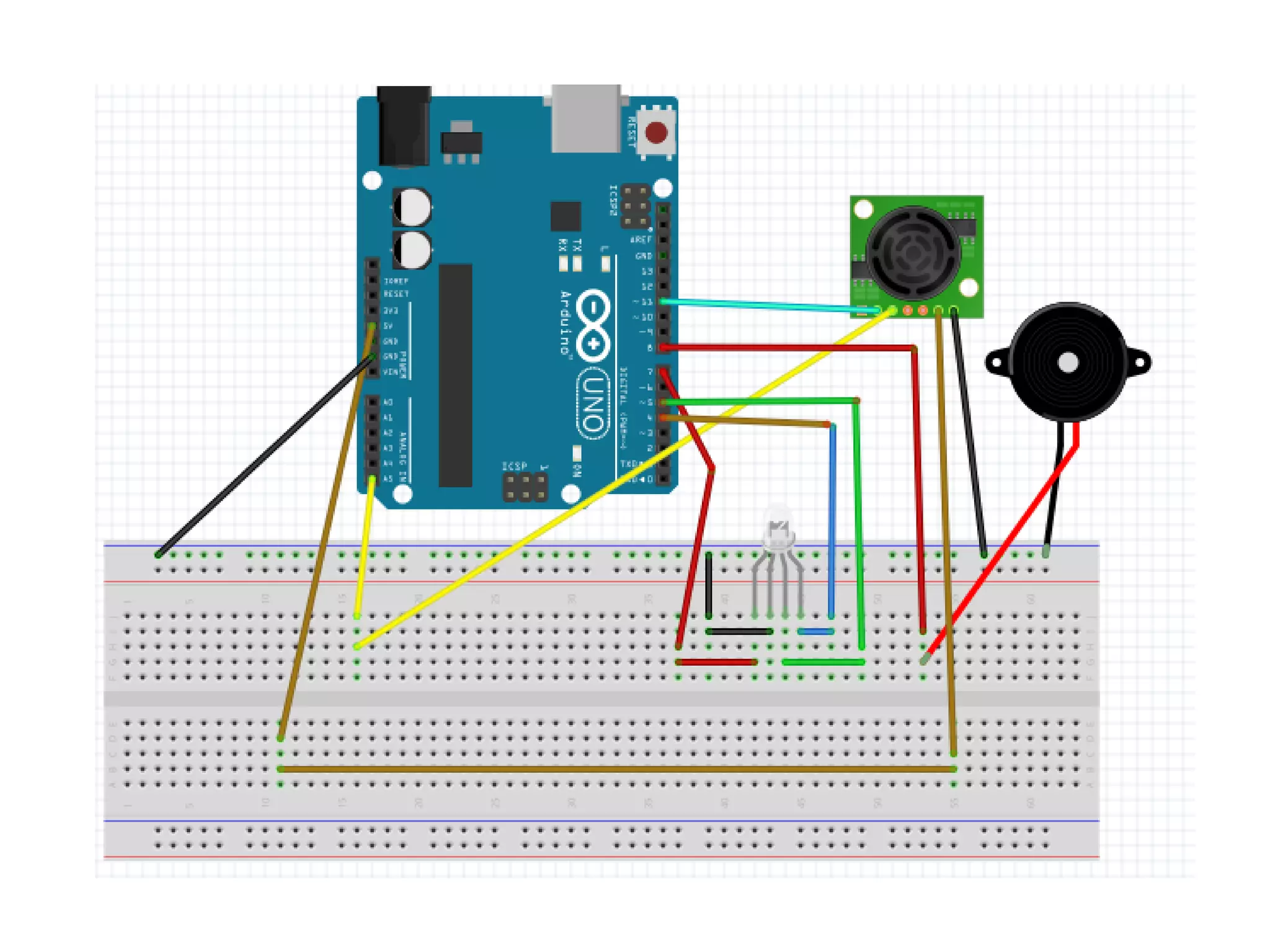
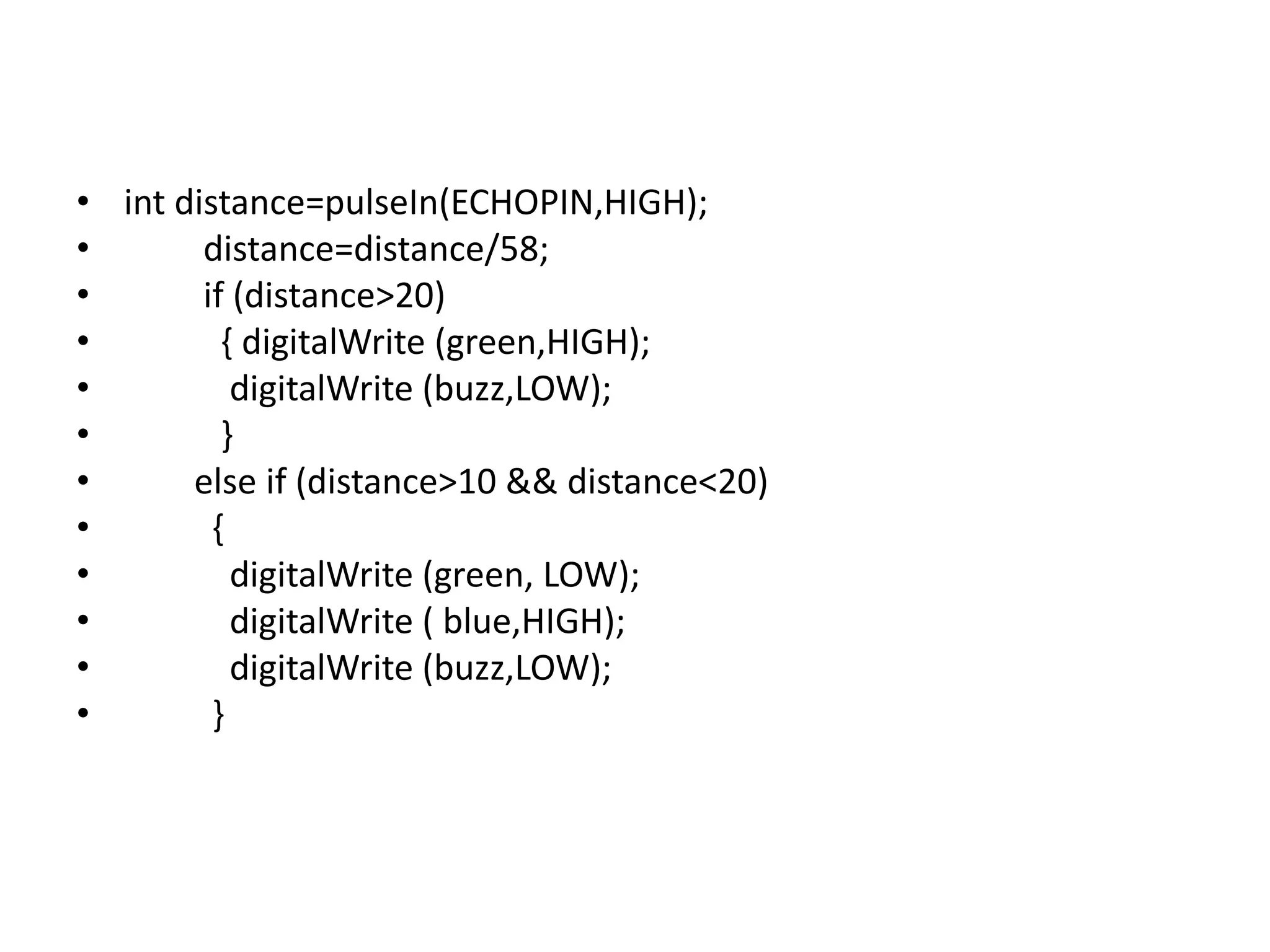
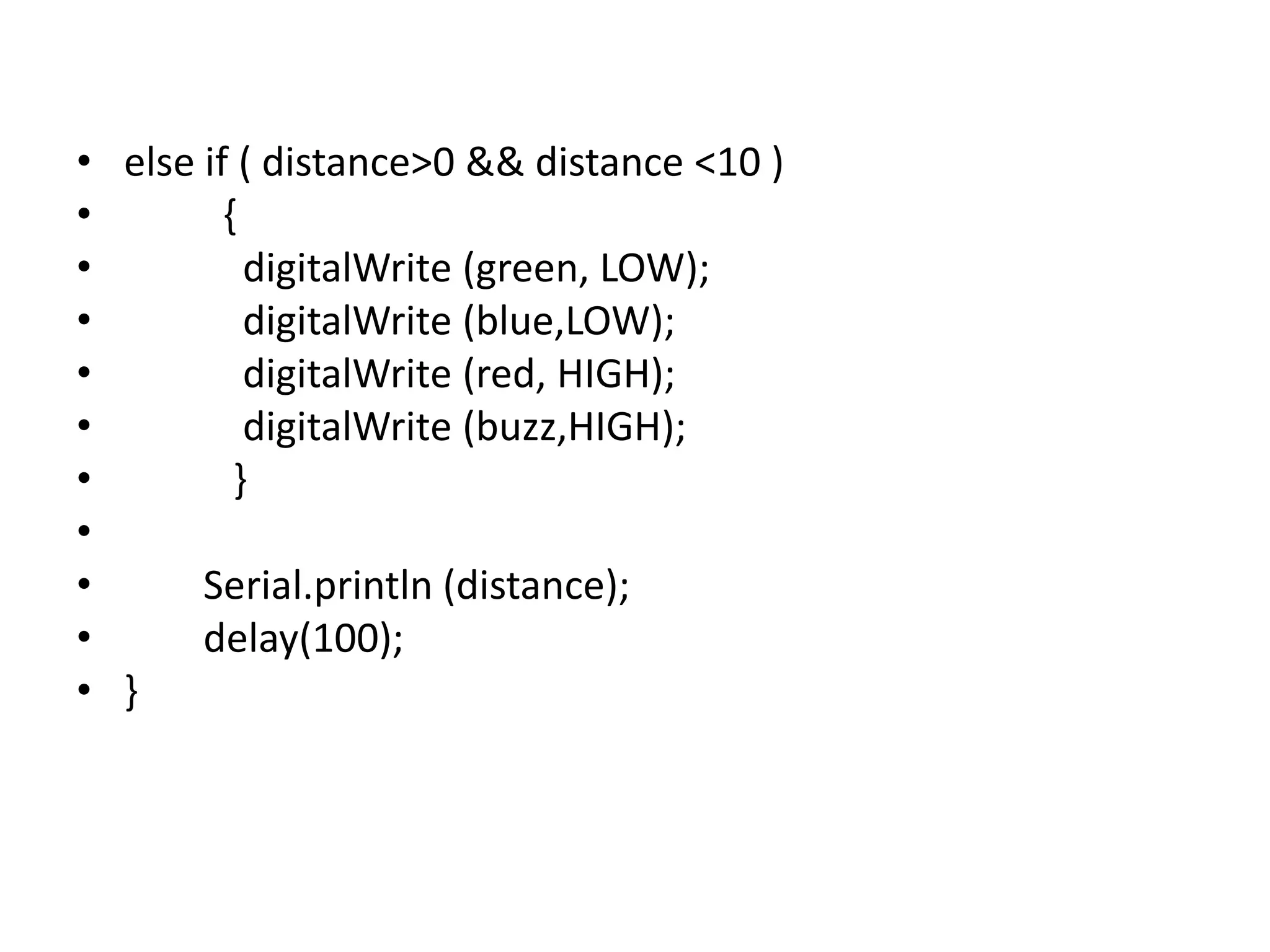

Arduino is a microcontroller board that contains an onboard power supply, USB port, and Atmel microcontroller chip. It simplifies creating control systems by providing a standard, programmable board without requiring complex PCB design. An ultrasonic sensor uses echoing sound waves to evaluate attributes of nearby targets, and the document provides code to interface an ultrasonic sensor with Arduino to measure distance and trigger an alarm.